示例.0082(1.0) "�\�M^��jO qFY���M�2� 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 �XfH[:�XG3
$23dcC�*hI 1. 描述 �f�8836<c ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 ^N:bT;;$nZ ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 �[�&a�=�vE ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ;*XH[>I���
B1C�u?k);. 2. 系统 YB'B�AX<lI 5]�yby"Z?} 文件名:UseCase.0082_FocussingSystem.lpd
_G=k��^f_� 3. 透镜系统组件编辑 _m�n�2bc9M
j�?y_ H�[Z
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 ^2��6}j uQ
■ 透镜系统是由序列光学表面(OIS)定义的。 Ov PTgiI!N
■ 每一个可选项都有独立的参数,并可以设定。 Z<�/.�Ss 4
■ 包括序列光学表面和光学介质。 &F#K=R| .j
�$���z���5 �Sn!�5/�9Y 4. 光线追迹系统分析器-选项 Ea�\Khf]2� b;%>?U`>�p e.j�b�FSnA
■ 分析器允许用户指定使用光源的光线选项。 :J6lJ8�w
?
■ 可以选择选取光线的方法: Y('��?�Z�]
— 在x-y-网格 �Y��]6kA5�
— 六边形 @j|=M��7�B
— 自由选取 �'W�Q�?%da
■ 每一个可选项都有独立的参数,并可以设定。 �0JM`*f%n ;���_Z[' % 5. 系统的3维视图 �E�r�XzK�f .DG`�~�Fpk 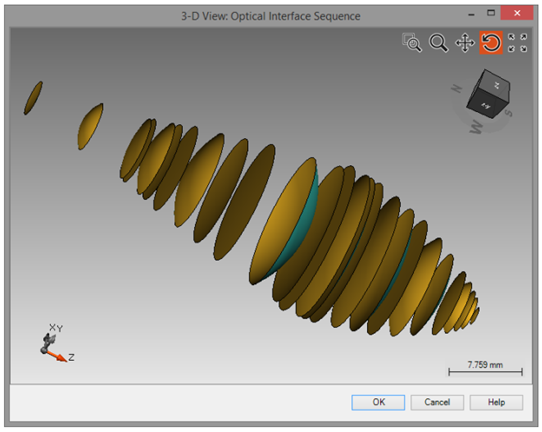 )7s(]~���z
)7s(]~���z 光线经过整个光学系统的三维视图
j;��SK{�Oq 光线经过整个光学系统的三维视图(局部放大)
yka�t0i�qo K|��sk]2. 5~GH*!h�%; BOdd~f%&tn )
o`ep{�<t 9mRP�%c#�( 8. 透镜系统后虚拟屏的结果 R;3n��L[{U GLW�EoV9<� &��\���$~
■ VirtualLab可用于计算点列图。 Ev>P|k�V&A
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 �8$`$2�4Wx
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 {U�"=}��j(
■ 你可以通过下面的操作将背景颜色该为白色 ^���i8"e�F
^���i8"e�F
�SS*3�Qx:[ 9. 焦平面上的结果 l�#bE�_PD;
|e{� �^Yf4
�0�"J0JcFX
■ 在左侧图片中可以看到焦平面上计算出的点列图。 K;j0��cxl
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 b>]k=��zd�
■ 焦平面上的光斑尺寸为183mm u�F<��}zFS
■ 此外,背景颜色也可以预先设置。 pPsT,��i?
■ 该测量采用均方根(RMS)计算法。 _N��ac��qa ;:o�bg/;uJ 10. 总结 7 >-(g+NF! ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 s
a{x.2/o} ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 7A�"��v�:e ■ 此外,系统可以直接利用光线追迹引擎进行分析。 ^?5Ha�gA�� ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 ,{2=� nb[�



