2022 年 12 月,发布 VirtualLab Fusion 2023.1 =2tl149m/z VirtualLab Fusion 2023新版本更新内容(三) {z0PB] �U� 2023.1版本新特性一览 �:d`8�:gv? �S�/)J<?<b 基本信息 �+f]\>{�o4
h8�-'I=��~
 i��#1��~<U
i��#1��~<U  �2H��j�;o�
�2H��j�;o� VirtualLab Fusion 2023.1新版本
主要更新方向 N \�Wd�0�b
 ��[-*�8�S1
��[-*�8�S1
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 B'`
jdyaE9
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: 69tT'U3vb$
- 更快的速度 [� Cu�3D��
- 更容易使用 }N}�\<RG��
- 融合更多物理光学模型 y+D"LeCAad
- 更高的透明度 `�h+1u`FJ�
- 多元的仿真控制选择 G����?&T�0
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 *iW$>�Yjb�
y��+�Z�CuX
y�9'F D5\s
功能概述(以下为更新内容的详细解释和案例展示): c-�, 6���k
数据视图 8G0D�uMI�5
��DZ9qIc}Y VLF 2023.1数据视图 g0~3�;�y�� :1�JICxAU 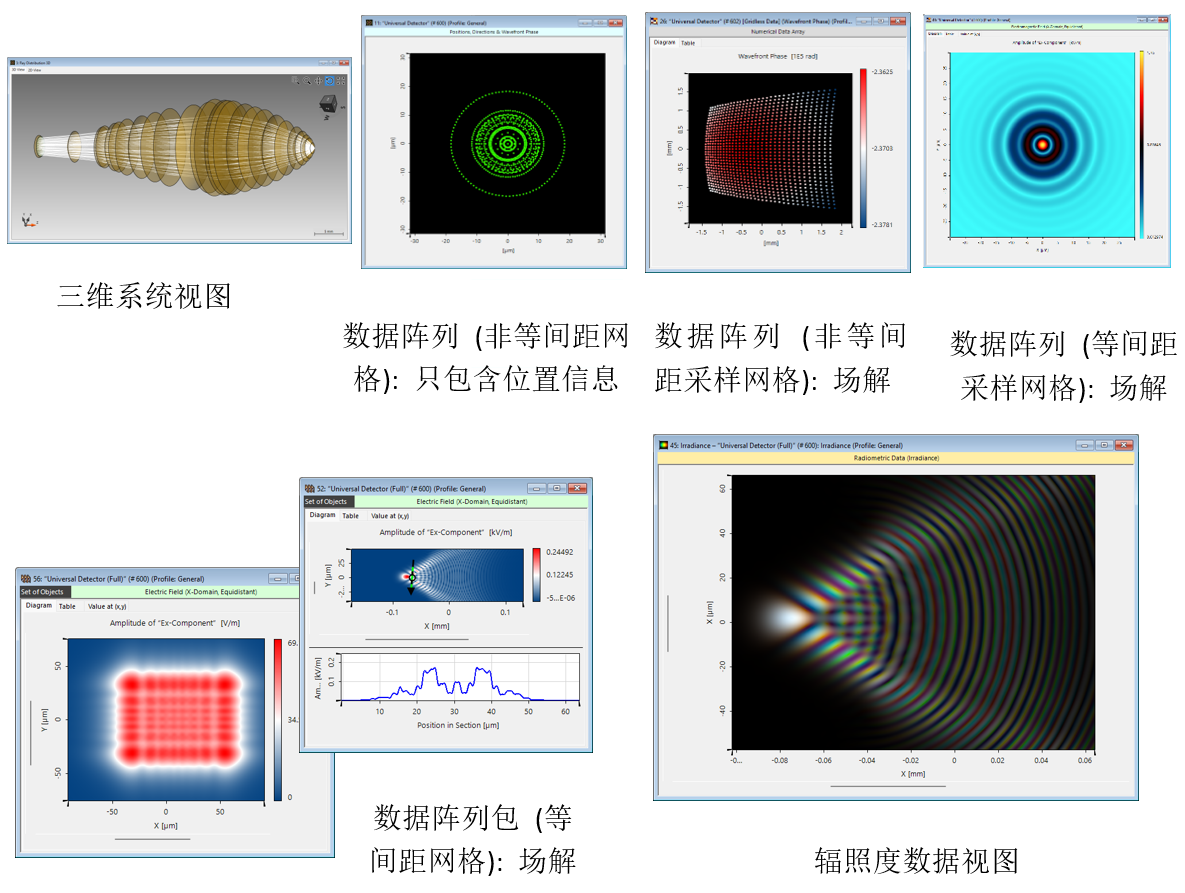 $xsmF?Dsx5 �dS[="Set� VirtualLab Fusion 2023.1数据查看方式 .1 =�8�c\%
$xsmF?Dsx5 �dS[="Set� VirtualLab Fusion 2023.1数据查看方式 .1 =�8�c\%
�g
:Z,
ab4
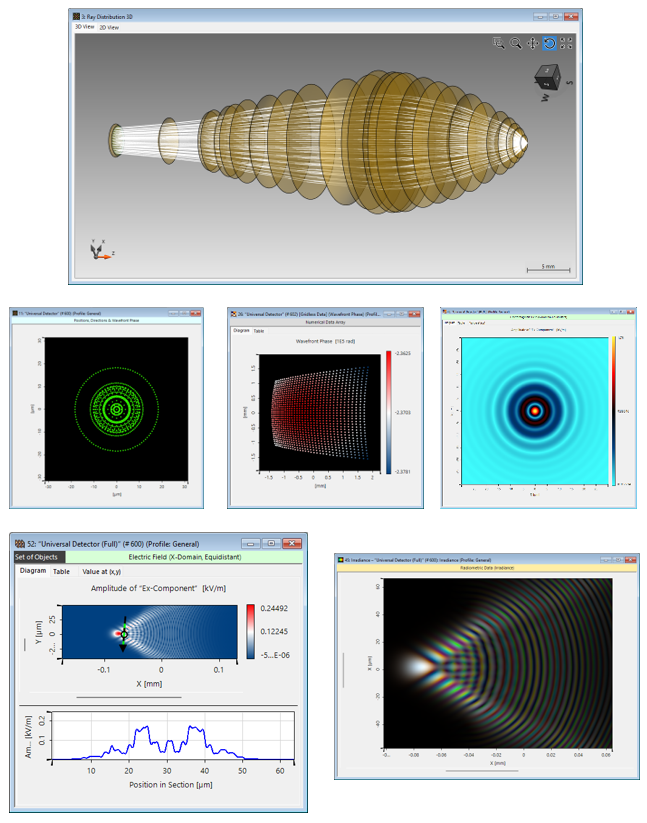 Z" !+p{�u Y><")%�Q�� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 !1�M=9 ~$! 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 B�hnw�b0b< 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 H%\\�-Z$#� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 8;�r7ksE~� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �=*u:@T=d5
Z" !+p{�u Y><")%�Q�� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 !1�M=9 ~$! 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 B�hnw�b0b< 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 H%\\�-Z$#� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 8;�r7ksE~� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �=*u:@T=d5
->S6S_H/+&
9+sO�Sz~
P
三维系统视图: 新的对话框以及设置选项 dqv��gy�yq
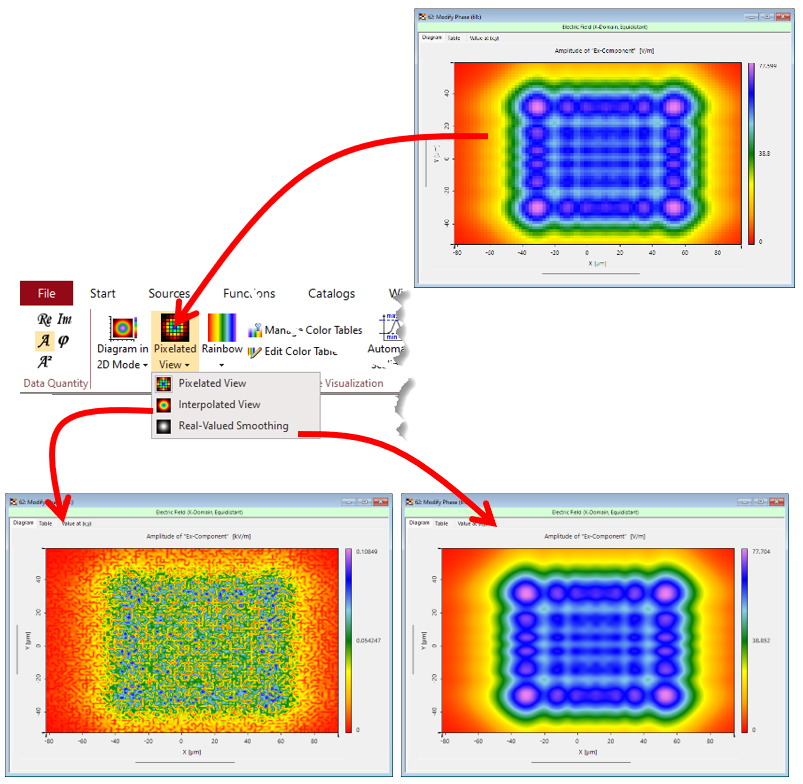
I;!�zZ�.\� 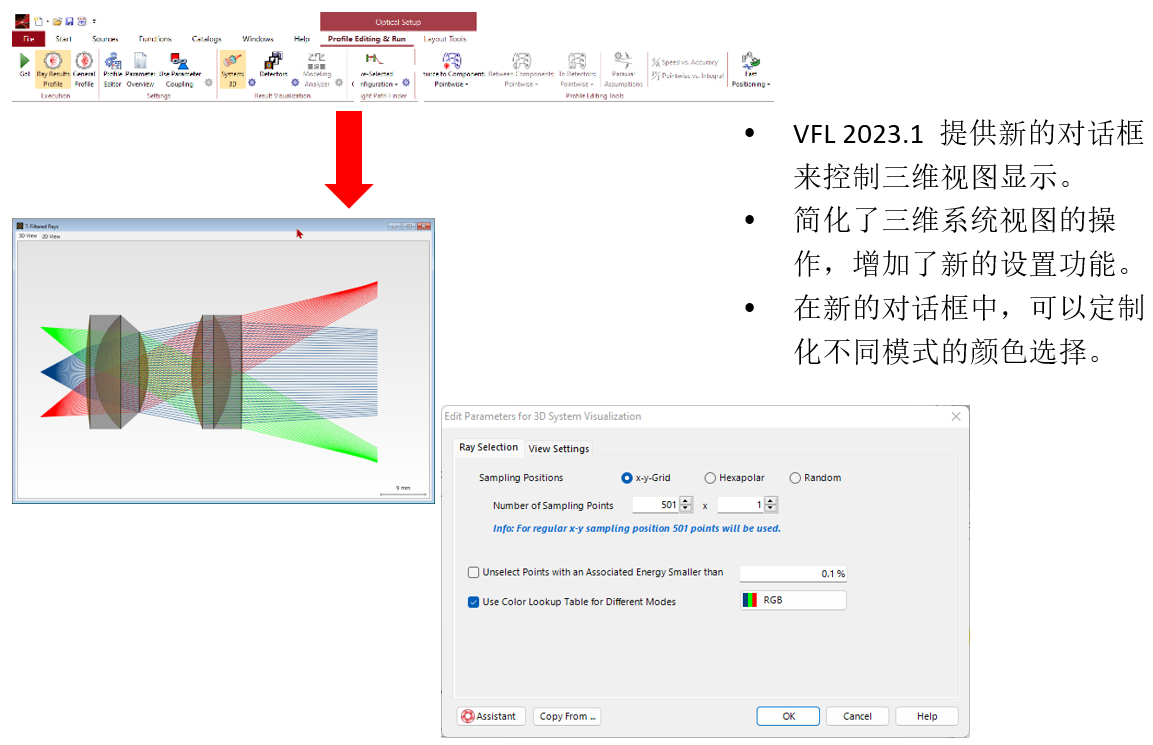 G$buZspL'd s�3LR6Z7;i 数据阵列视图: 像素数据(Pixelated Data)平滑 ]&D;'�), � ���@Fl&@ $ • 探测器中的像素越少,探测器评估速度更快。 5E#koy7
$s • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 pd��r�F/U+ • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 UkY
`&&ic� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 jS�j
(ZU6�
G$buZspL'd s�3LR6Z7;i 数据阵列视图: 像素数据(Pixelated Data)平滑 ]&D;'�), � ���@Fl&@ $ • 探测器中的像素越少,探测器评估速度更快。 5E#koy7
$s • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 pd��r�F/U+ • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 UkY
`&&ic� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 jS�j
(ZU6�
G)E#w�h_S^
 u/h!i�@_w[
u/h!i�@_w[
��|�F'k5Lh
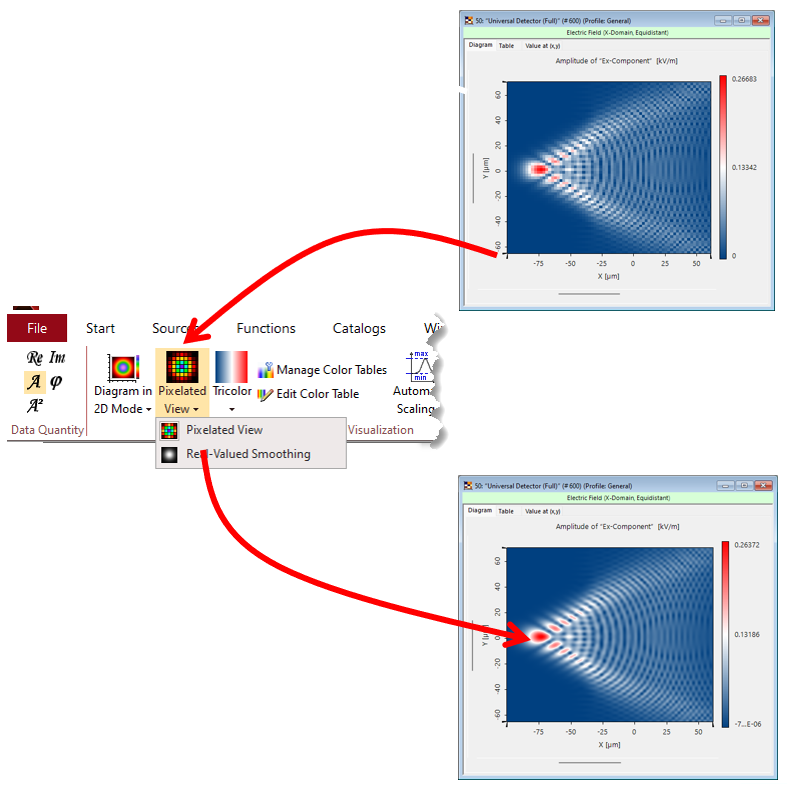
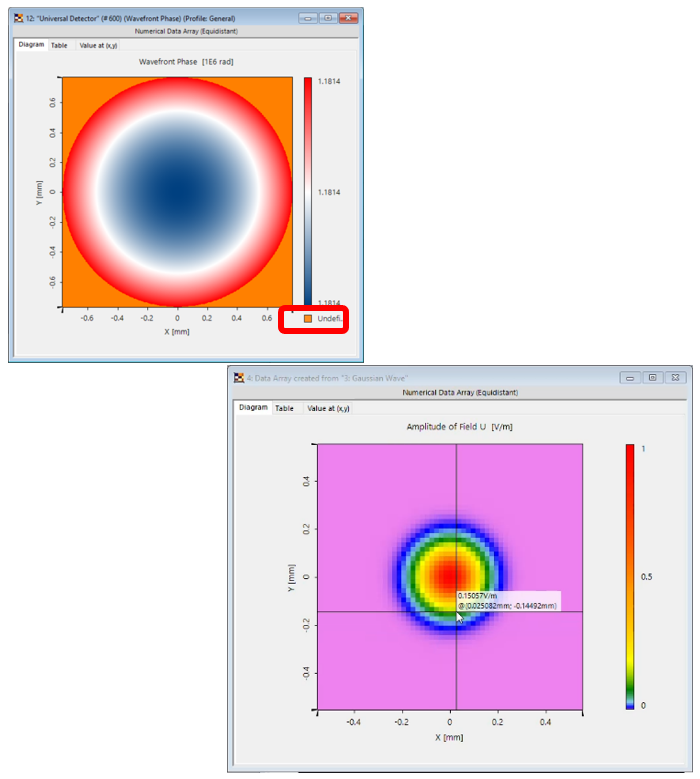
数据阵列视图: 像素数据(Pixelated Data)光滑化 ,6%{9oW9Z:
vK�X
��$Nf
GAl���AFsB
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 Yj�r6/&M�L
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 \q��8�D7/q
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 -;?5<�>zZ�
t7%!~�s=,M
 T�Z7{�cekQ
T�Z7{�cekQ
��Yz�?1]<X
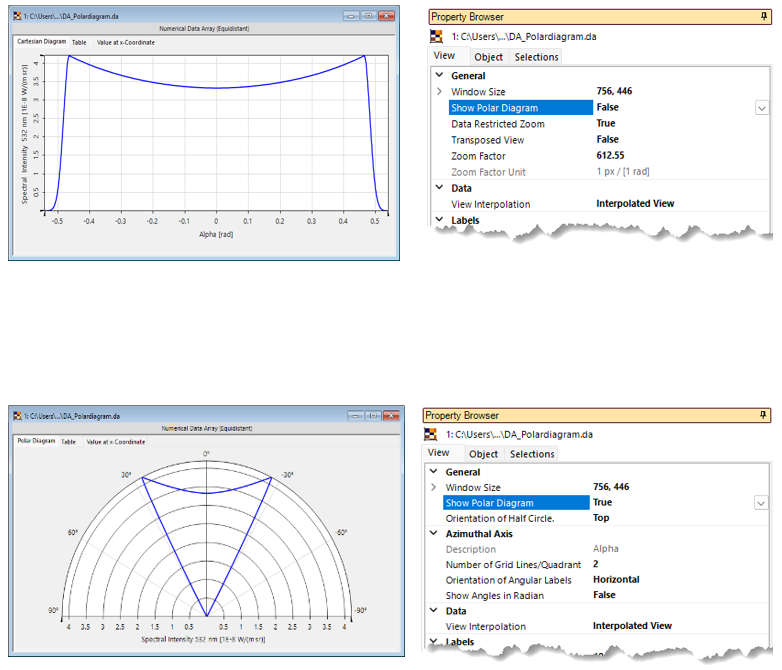
数据阵列视图: 极坐标图(Plolar Diagram) ���~!,Q<?�
#6�tb{�ws3 • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 BlV��k�?n� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 f(O`t�}�Ed • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �Rp��2~�d� • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 j;��O{Hvvz
[�Q�/')�5b
 G�e|& �H]W
G�e|& �H]W
A;s�d���rA
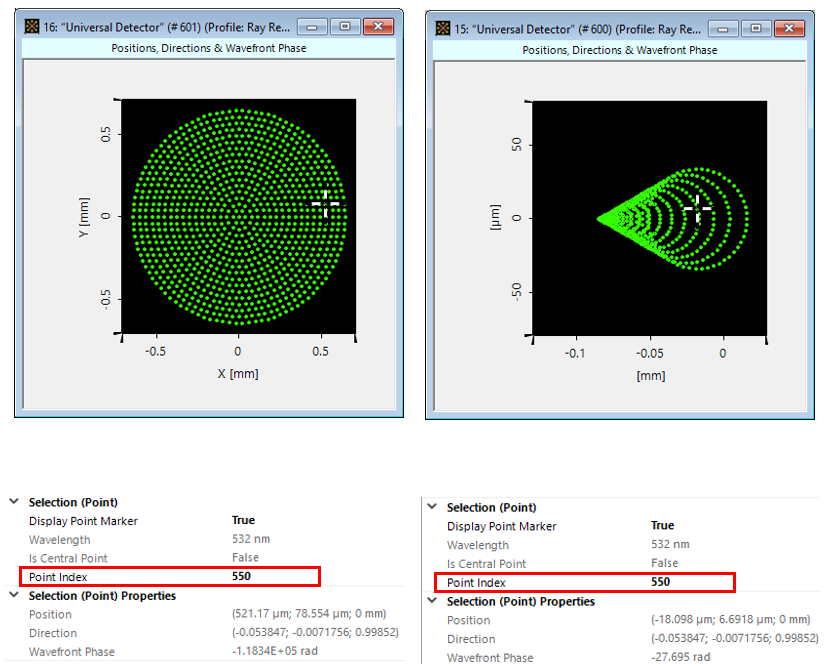
数据阵列视图:找寻以及点的标识 C_��[V[k0(
*���6)u5�
�.�bO�ueB-
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 �#pxc6W /�
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 j${:Y$V�mE
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �TA}z3!-y*
N.q4Ar[x#p
 c
25�wm\\
c
25�wm\\
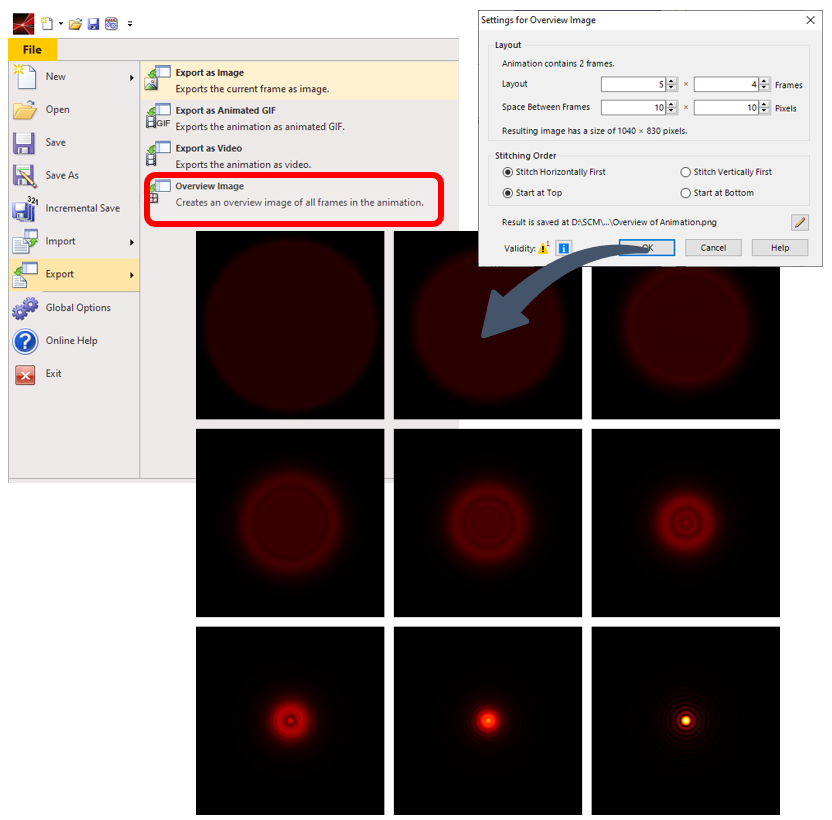
j~�G��^J�� 导出图像的概览 �(W�K�$
)f lHpo/�R�: Q~4o{"3.'�
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 [H#I:d-+�\
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 icF� -��`m
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 T[=�XG��AJ ���DU7��kZ
 3:a}<^DuCS
3:a}<^DuCS
<ZJ>jZV0�*
数据阵列视图: 更多的新功能 �>qn@E?Uf
HnVUG4yZTD
{sy#&m(e�l
• VFL2023.1可以对未定义区域填充不同的颜色。 �H{x}g��BQ
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 j>M
'nQ,;d
2I�:vie�
 �twx8T�Q�9
�twx8T�Q�9
Q=yQ�Eh|�Y
Graphics Add-ons提供更多数据视图选择 �jo�ifI�p_ piO+K!C0n: Y��}"�|J ~
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 �{�"e/�3��
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 �
UJoWT�x
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 +*g[h�Rw[� qTiU�h�a9� 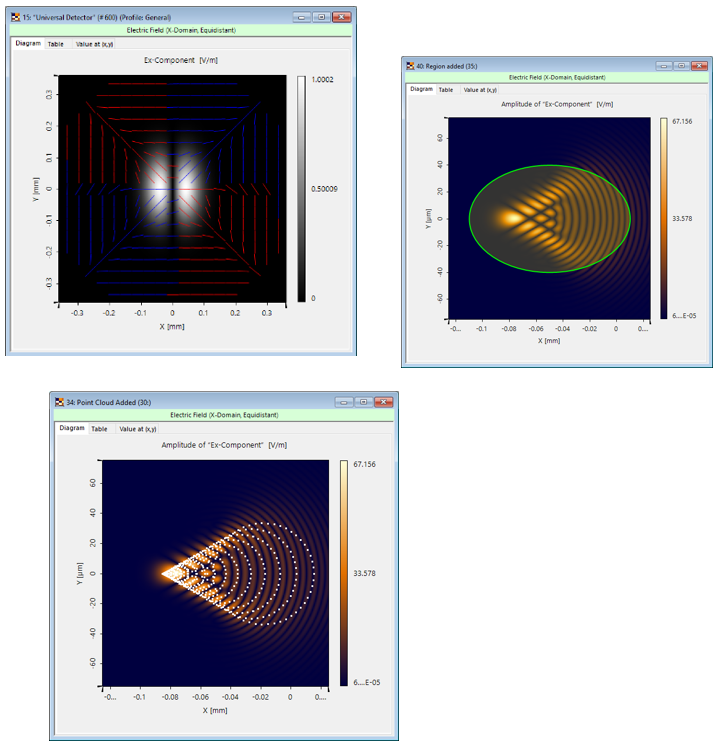 J=TbZL4y}4 L.15�EX�AB 4aAr|!8|h! Graphics Add-ons提供更多视图选择 T}P�|��uP� S�V]M]CA�e
J=TbZL4y}4 L.15�EX�AB 4aAr|!8|h! Graphics Add-ons提供更多视图选择 T}P�|��uP� S�V]M]CA�e • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
x#|���P-^� • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
@l&5 |Cia� • 图像组件提供了多样化的配置选项。
��-�nO('(t o��C U8�;z 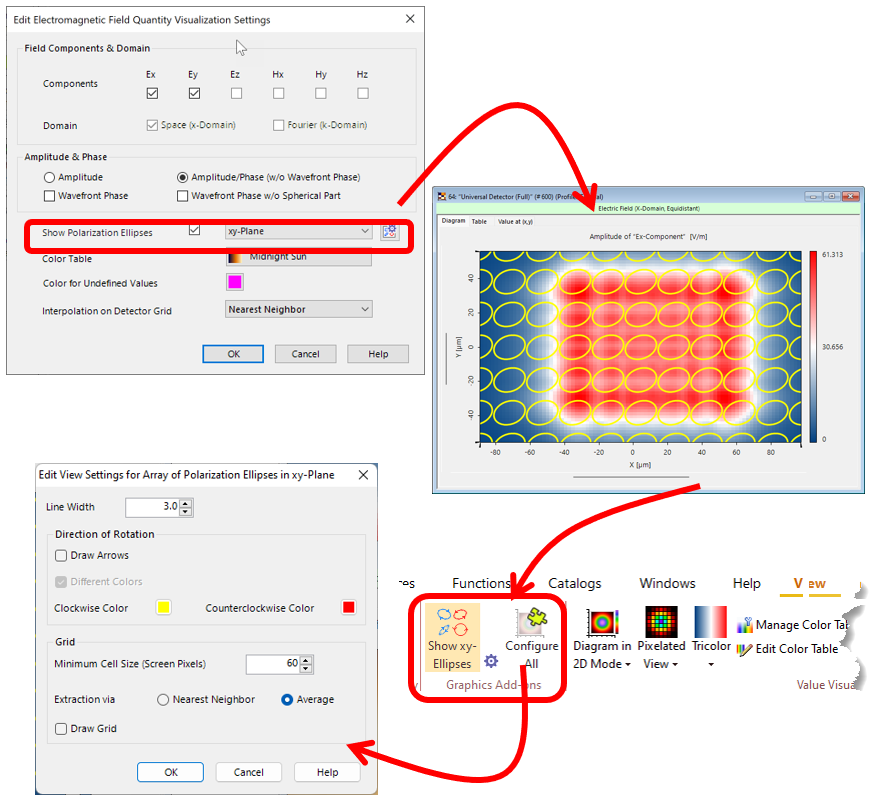 ~SJO�ynSz, &P!^k0�NJR >}<:5gZ�tA Graphics Add-ons: 增加了 Point cloud 功能 Z�8k�O*LYv *E�.{�i�
� "[H9)aAj�7
~SJO�ynSz, &P!^k0�NJR >}<:5gZ�tA Graphics Add-ons: 增加了 Point cloud 功能 Z�8k�O*LYv *E�.{�i�
� "[H9)aAj�7 • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
�~m
�uVQ� 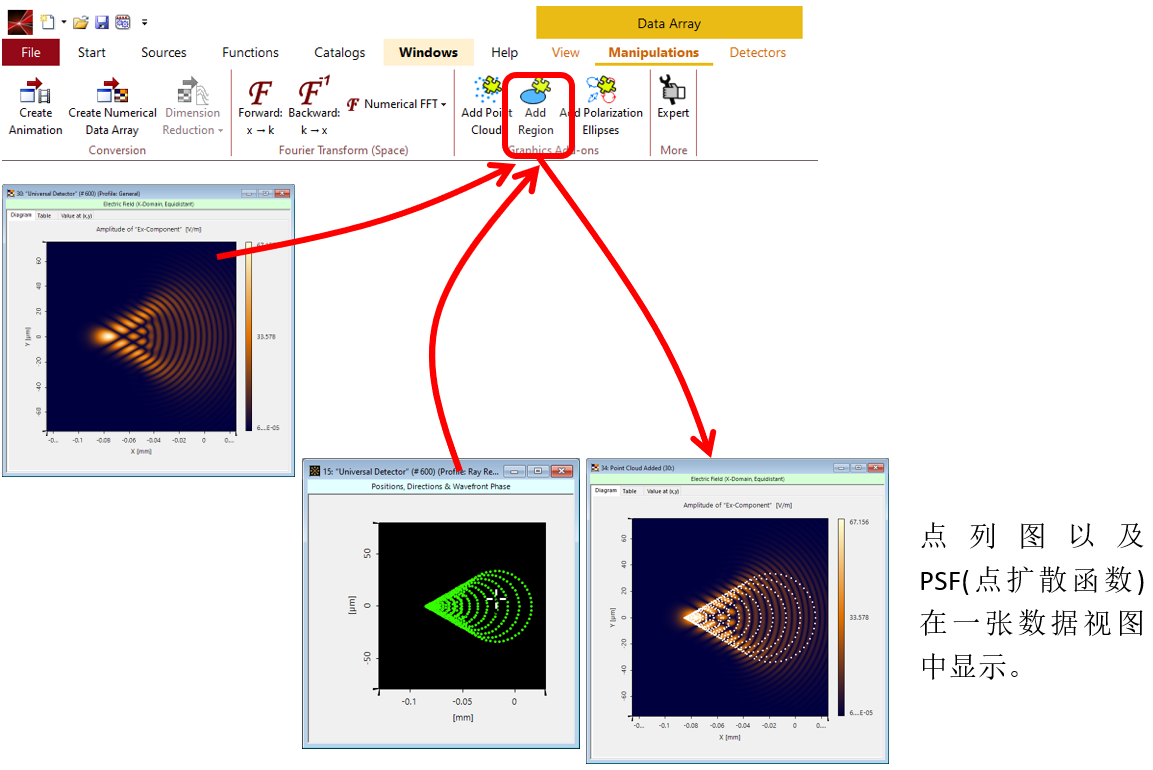 -MHu BgYJ- RgQ\�Cs24Q VirtualLab中的区域 (Regions) �pZGs����o >Q+a'bd �w U*k$pp6\b~
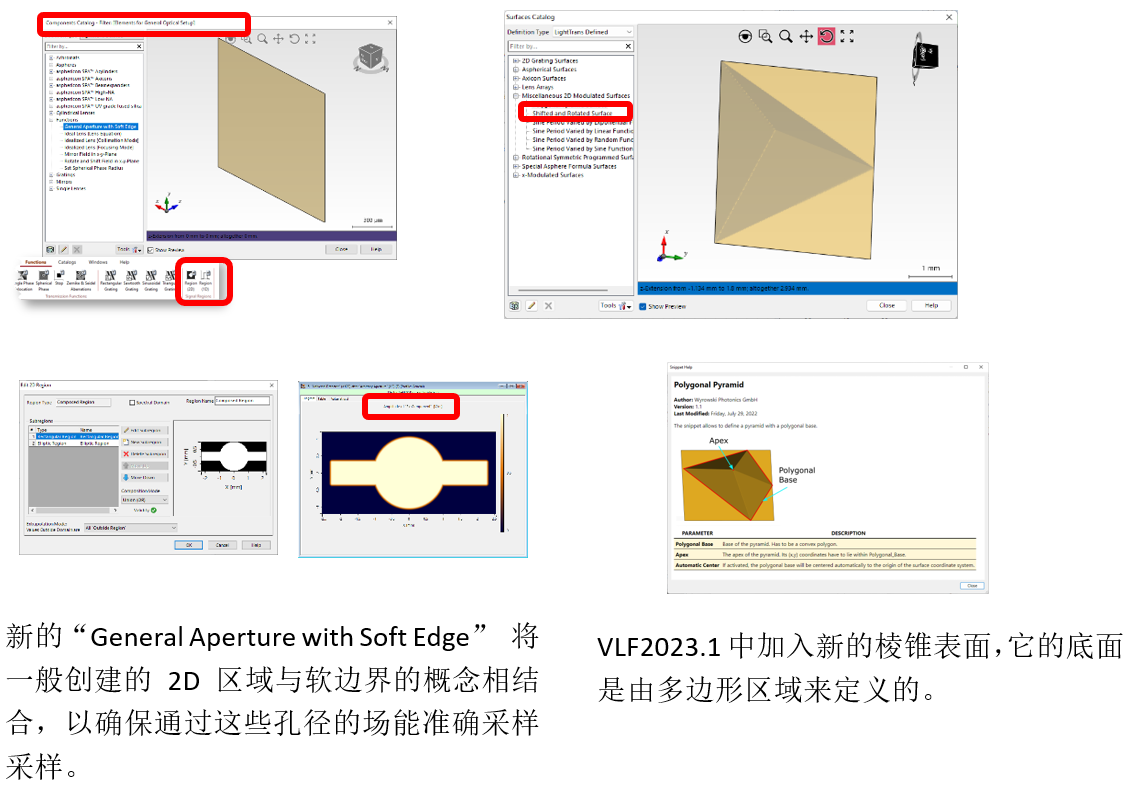
-MHu BgYJ- RgQ\�Cs24Q VirtualLab中的区域 (Regions) �pZGs����o >Q+a'bd �w U*k$pp6\b~ • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
)TyL3Z\>(� 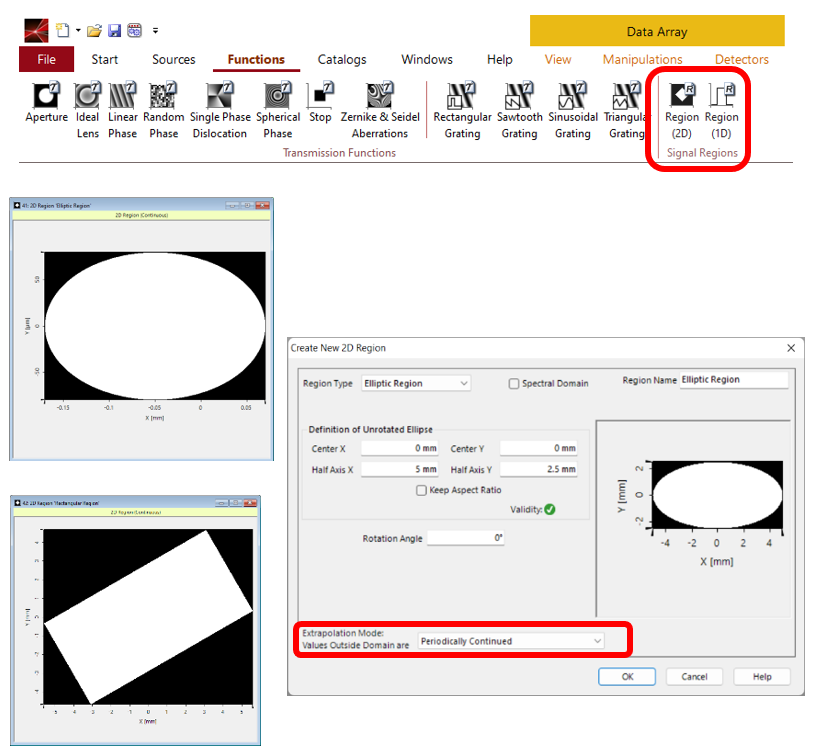 lyZof�_�/* `X^�4~�6/q F�f& VB��m Graphics Add-ons: 添加区域(Add Region) +zs;>'S�f� ;pb~Zk/[,w �&��6��6G�
lyZof�_�/* `X^�4~�6/q F�f& VB��m Graphics Add-ons: 添加区域(Add Region) +zs;>'S�f� ;pb~Zk/[,w �&��6��6G� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
BD��=;4SLT 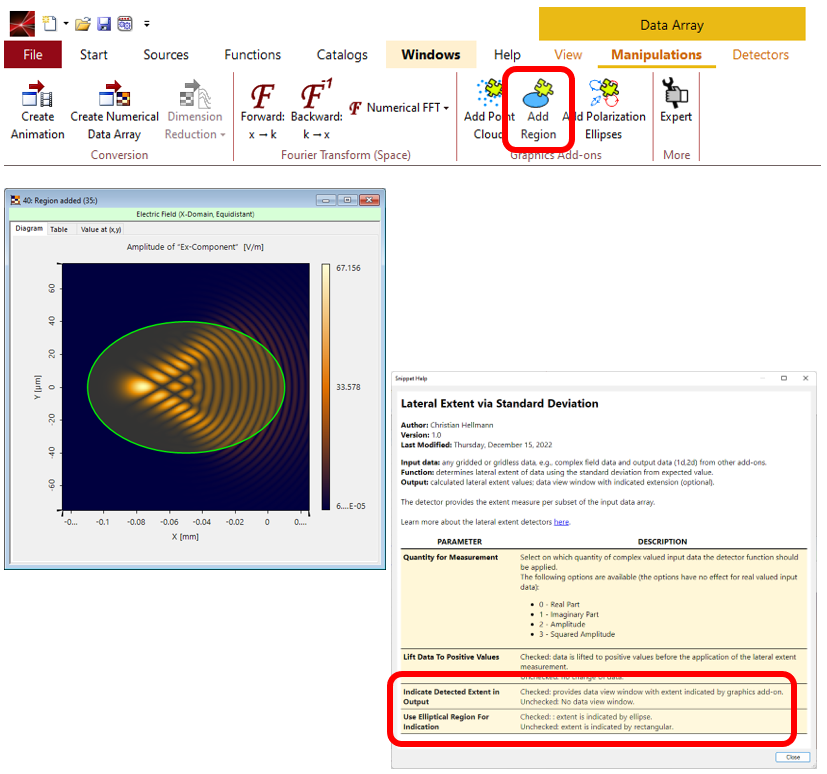 r9s1\7]�x� 3=dGz^Zdv:
r9s1\7]�x� 3=dGz^Zdv: 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
��N3r{|Bu� ":"�M/v%�F Graphics Add-ons: 添加区域(Add Region) X^9�_'�T�9 ,3GM'e{hV� FNmIXpAn*@ • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
��h{�<^�?= �K]kL?-A#' 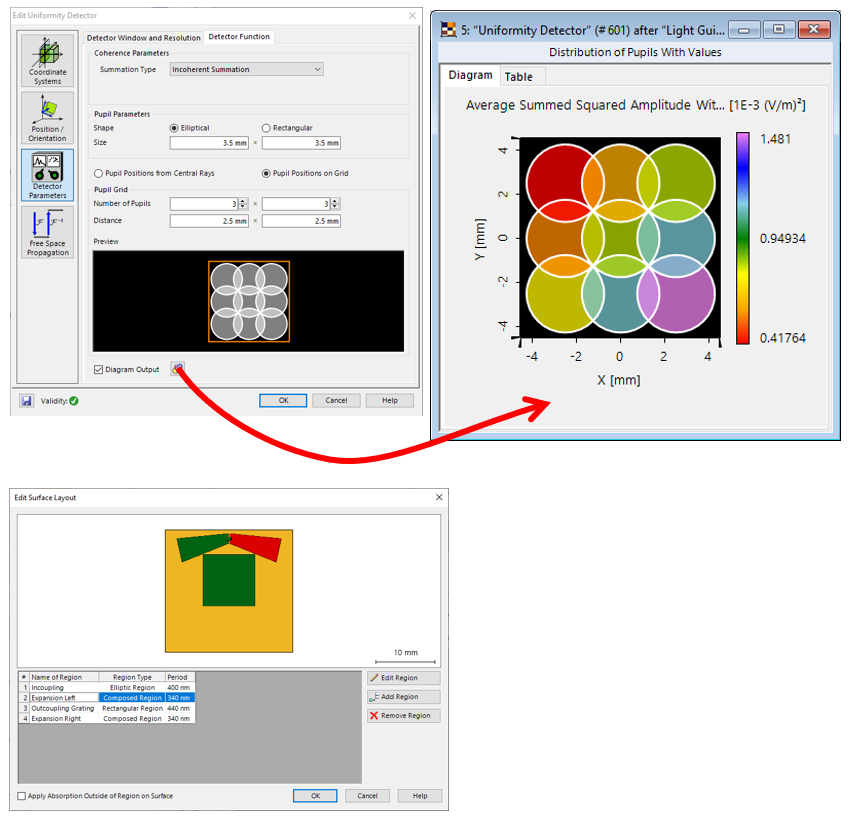 %F&j� B���
%F&j� B��� • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 PU?k�QZU~) �MQ\:/]�a� r7ywK9�UL� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
�sd8�o&6�� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
��.�#�j)YG 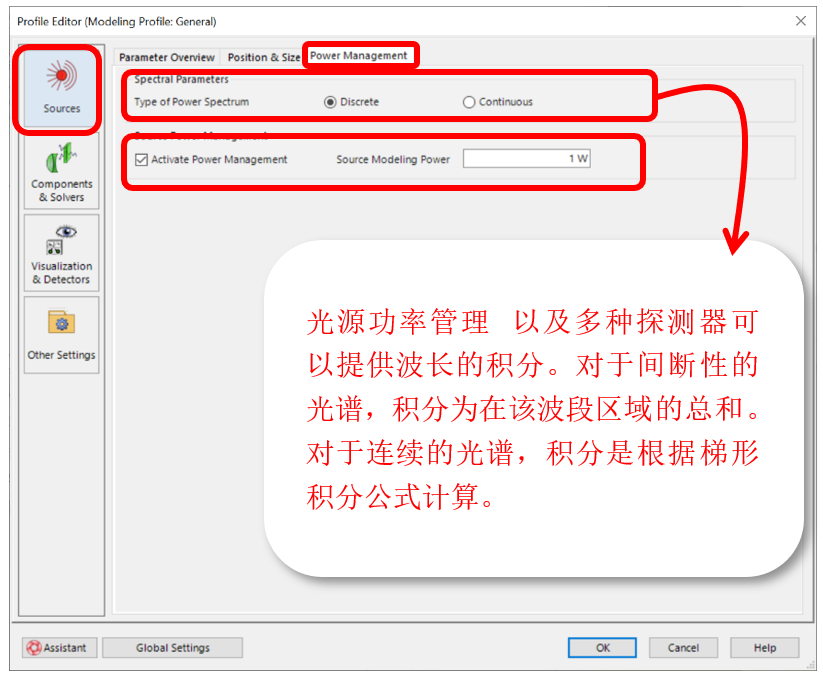 1��oX"}YY1
1��oX"}YY1 • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
s o��~p+]� 1. 针对给定光源参数,进行光源功率的评估。
"�-<u.$fE� 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
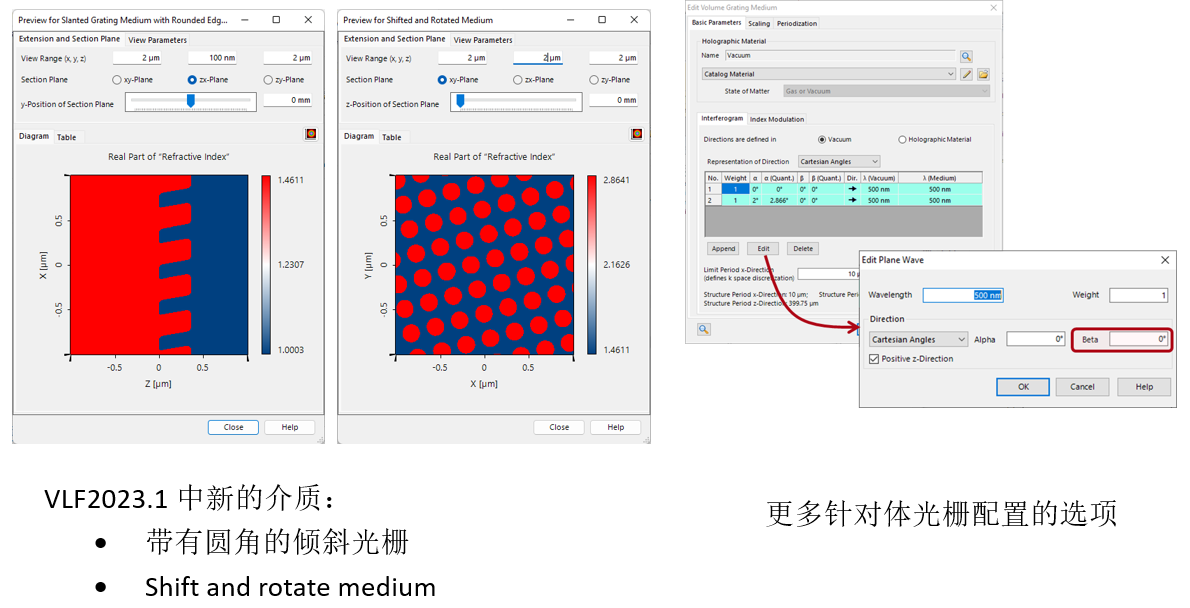
|[o2S�9��0 Fl*@@jQ8cV 组件 R�"O9�~s6N 组件(Component)新的特征 �m(��g$T�� e|M�yA?`�� \3)%p��(�' • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
h.2!d�0�j] 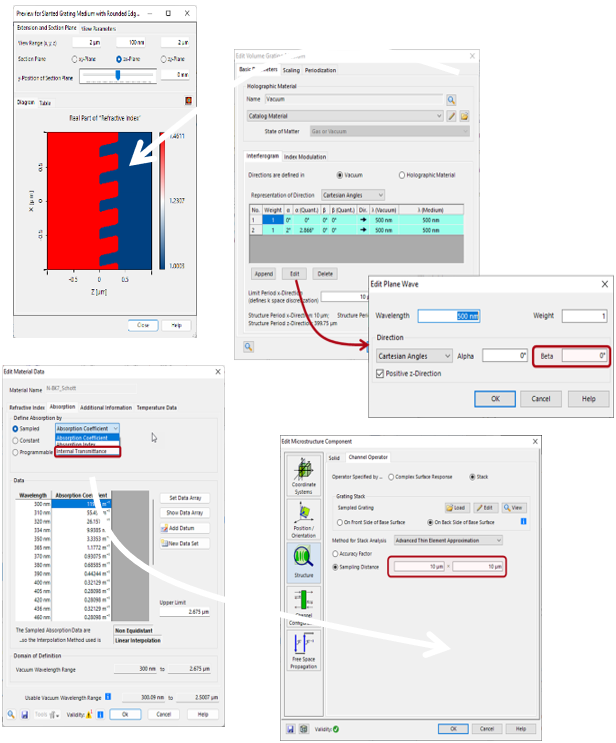 Sf�L,_X]�* @4$F%[g�
h 组件(Component)新的特征 SC|cCK hqi
Sf�L,_X]�* @4$F%[g�
h 组件(Component)新的特征 SC|cCK hqi
�"_#%W
�oo
 TF=S \
�Q
TF=S \
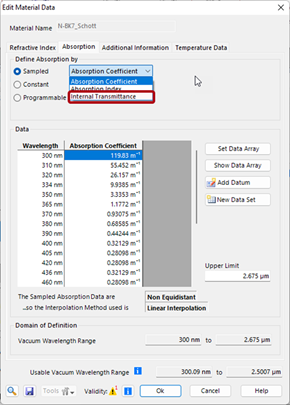
�Q 吸收特性可以用采样数据定义吸收率以及透过率。
f+��I*aB�Q *[�y�CcqN. 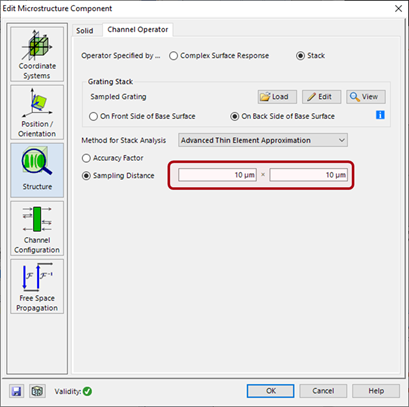 �;�xth�#j� y[�r T5�ed
�;�xth�#j� y[�r T5�ed 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
2s���6V�y� `/+7@~[R�U 组件(Component)新的特征 "n��]B~D��
h� Qu9�u�x
 fG,qax`:�c �B0�R���[f 组件(Component)新的特征 ;WGY)=-gv
fG,qax`:�c �B0�R���[f 组件(Component)新的特征 ;WGY)=-gv
�*��VRFs=�
 4El{2cfA� *"e[au^8*b 组件(Component)新的特征 �3`�e1:`Hu
4El{2cfA� *"e[au^8*b 组件(Component)新的特征 �3`�e1:`Hu
,vN#U&��RS
 j��6v +S�� R [�uo��:. �1��^Caz-�
j��6v +S�� R [�uo��:. �1��^Caz-� 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
z�cZr
)�Oh 处理日志 :'!?�dszS� KqtI^�q�C8 扩充版的处理日志 9L�&AbmI�r a[#4Oq/�t$ 6Jj)[ R\5= • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�,b�H����� 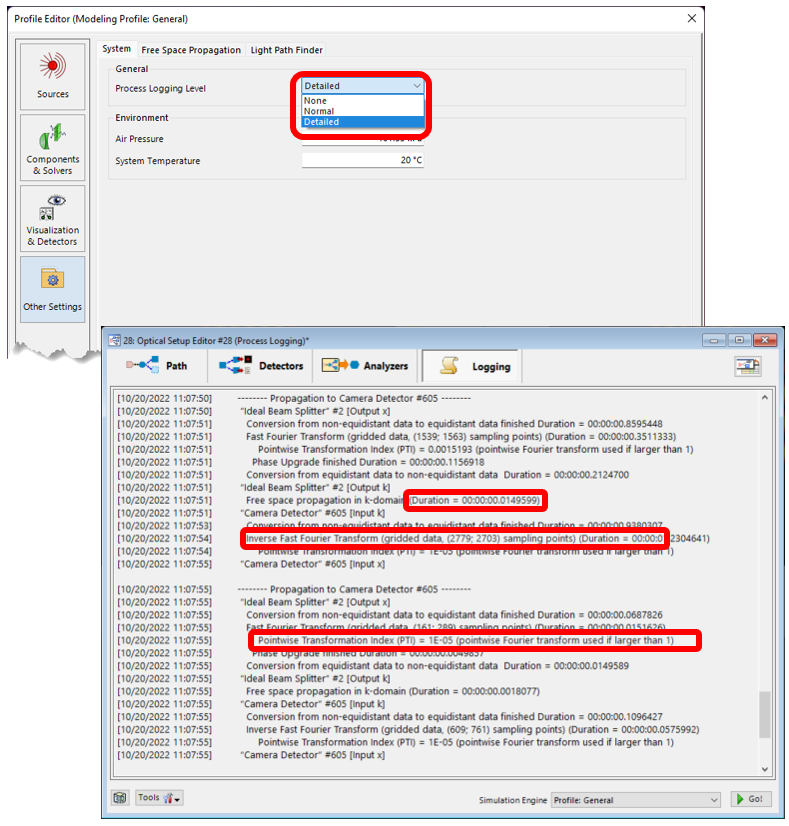 3G�>�E>yJ� �U`8)rt�Yw 系统仿真分析 �^�ul���`b �Y0eu�^p)�
3G�>�E>yJ� �U`8)rt�Yw 系统仿真分析 �^�ul���`b �Y0eu�^p)� • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
H"&N�<"�hw 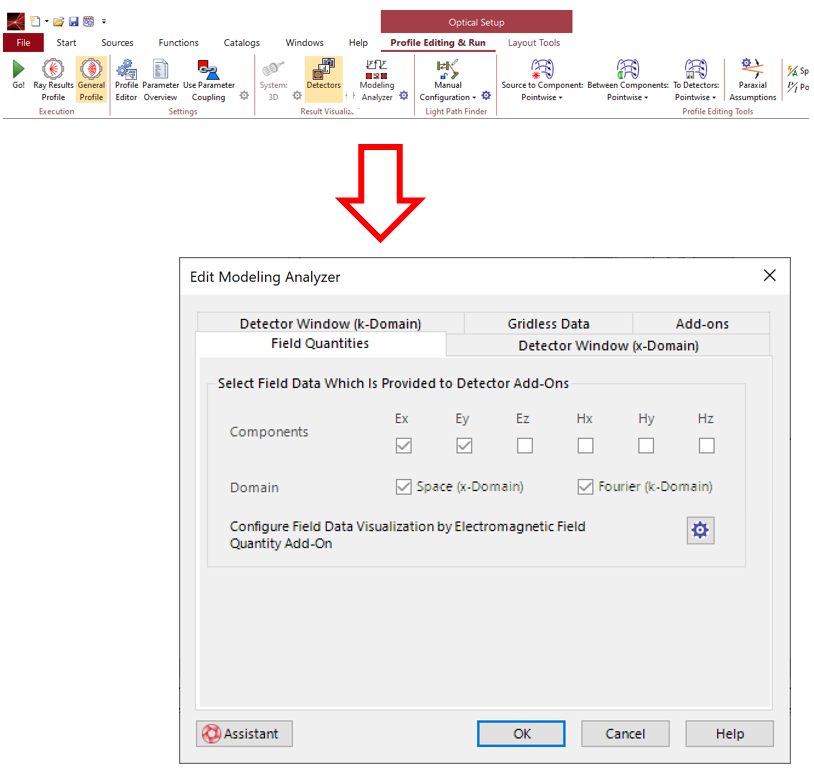 ;�h�Z�(�20 B�o~wD|E�2 专家模式(Expert Modus) (w�A�|�lK3 wvh4AE5F|z 专家模式中的数据阵列’Manipulations’ ��^~�A��r� E=��x\f "Z �C]):�+F<7
;�h�Z�(�20 B�o~wD|E�2 专家模式(Expert Modus) (w�A�|�lK3 wvh4AE5F|z 专家模式中的数据阵列’Manipulations’ ��^~�A��r� E=��x\f "Z �C]):�+F<7 • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
H��[G EAQO 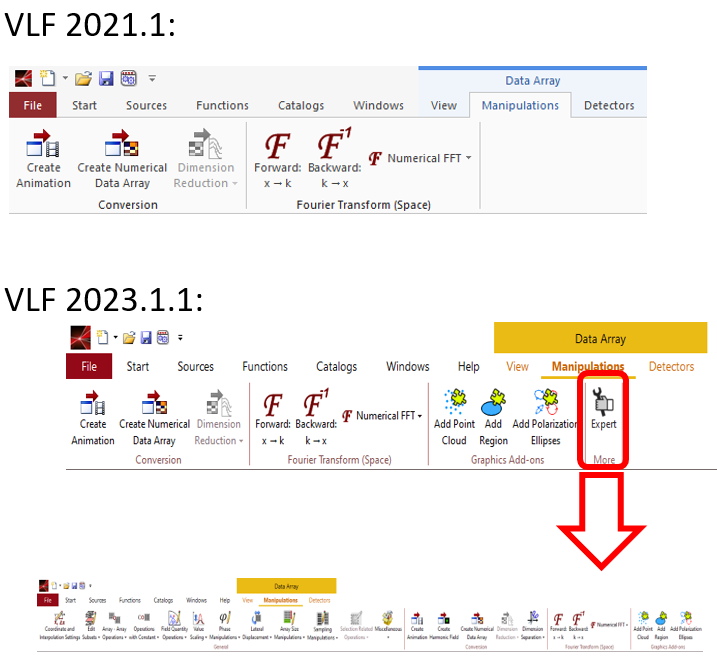 'Kl�z`�)F� �n1;V2k{uV 微小的改进帮助:新的计算器 x208^�=F\\ $8eq&_gJ�� �p,1�RRbyc
'Kl�z`�)F� �n1;V2k{uV 微小的改进帮助:新的计算器 x208^�=F\\ $8eq&_gJ�� �p,1�RRbyc • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�RdY�#�B�; 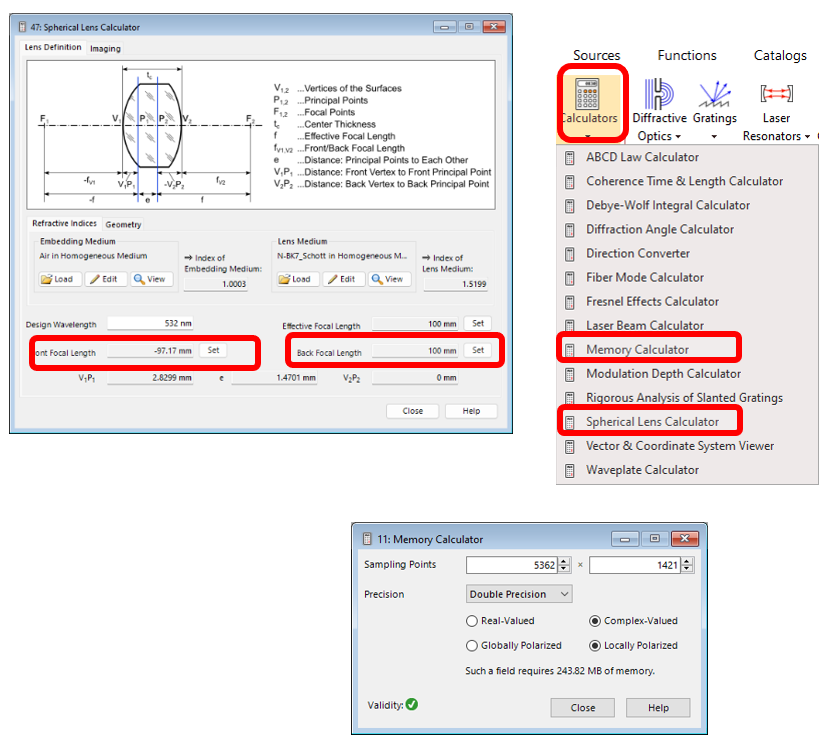 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



