2022 年 12 月,发布 VirtualLab Fusion 2023.1 ��JTGA�\K� VirtualLab Fusion 2023新版本更新内容(三) @�}9*rWJIE 2023.1版本新特性一览 6s��c�eymq ?{=&�R�o�� 基本信息 ~�dc��
o�
p�Q�~�Y�7
 Ln-UN$2~F�
Ln-UN$2~F�  l��U?8<��X
l��U?8<��X VirtualLab Fusion 2023.1新版本
主要更新方向 wF�bw3>'a9
 [A �jY��~
[A �jY��~
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 om_�UQgC@r
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: �2/�o�_,k
- 更快的速度 �?,XrZ�RF�
- 更容易使用 % 9�Jx|�
- 融合更多物理光学模型 .)(5F45W�g
- 更高的透明度 hW<�TP'Zm*
- 多元的仿真控制选择 %�Z�~0vwY
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 M��ZIZ"b��
bi{G
�:xt
�Mo'�6<"x
功能概述(以下为更新内容的详细解释和案例展示): gh9Gc1t�Kt
数据视图 k�2��-+3zx
�3A�&:
c/� VLF 2023.1数据视图 F)8M9%g5�m 2^aXX�P��C 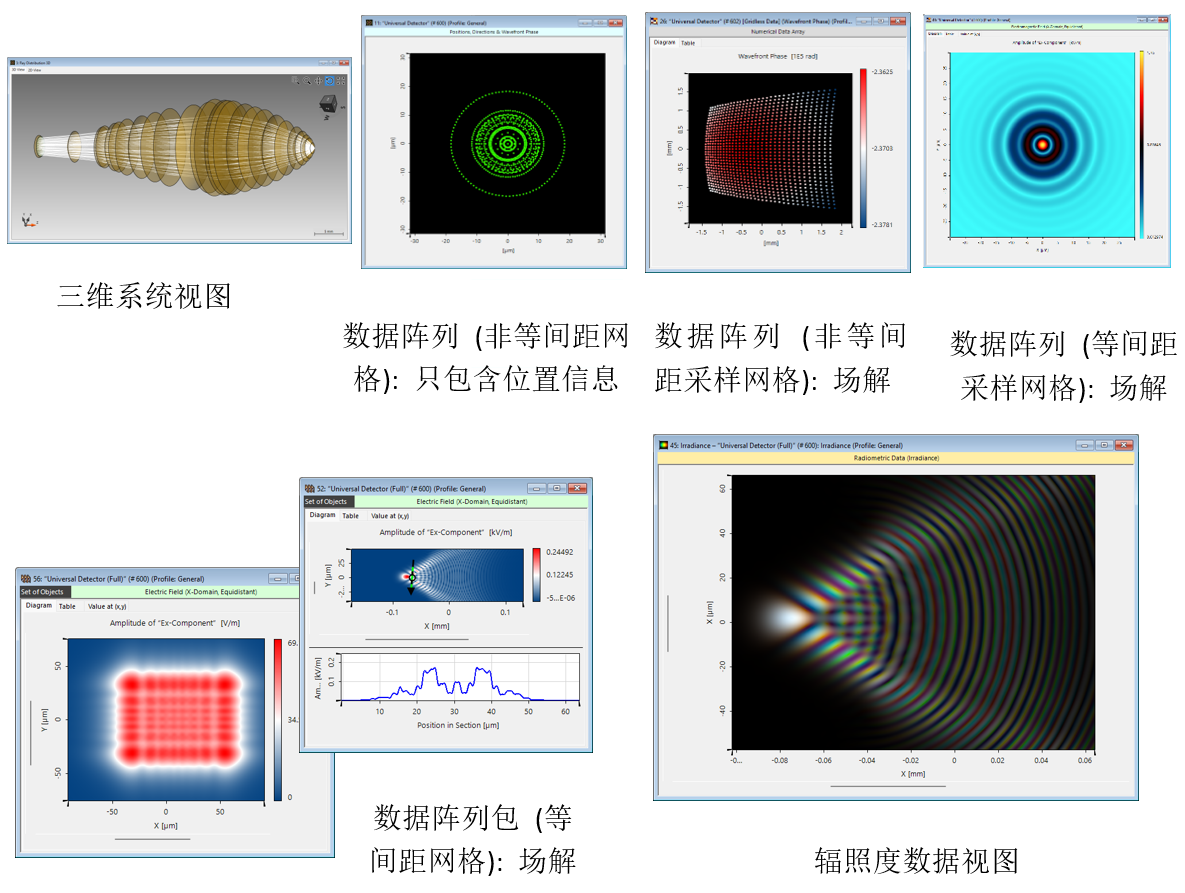 �m>FP&~2�� "udA�-;!@& VirtualLab Fusion 2023.1数据查看方式 '�@6O3�z_{
�m>FP&~2�� "udA�-;!@& VirtualLab Fusion 2023.1数据查看方式 '�@6O3�z_{
�J�b;@'�o6
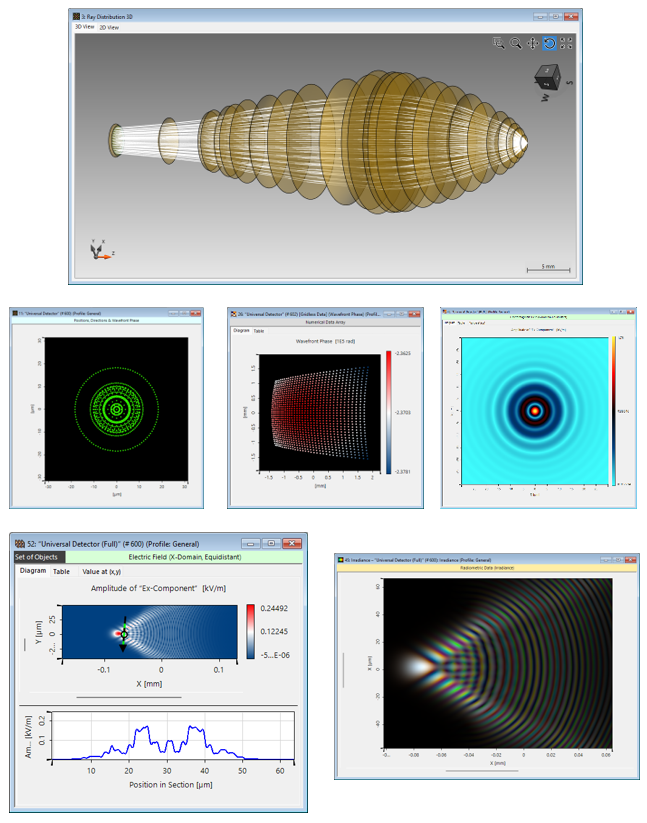 Z\[6�'R4.# R6cd;| fan 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 '�_�q&~M{ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �;�$.^���� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 m'n<.1;1{j 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 0{^� 0>�H0 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 `;
+UW�dAR
Z\[6�'R4.# R6cd;| fan 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 '�_�q&~M{ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �;�$.^���� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 m'n<.1;1{j 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 0{^� 0>�H0 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 `;
+UW�dAR
PenkqDc��}
�R4_B�P5+�
三维系统视图: 新的对话框以及设置选项 [iXk��v��\
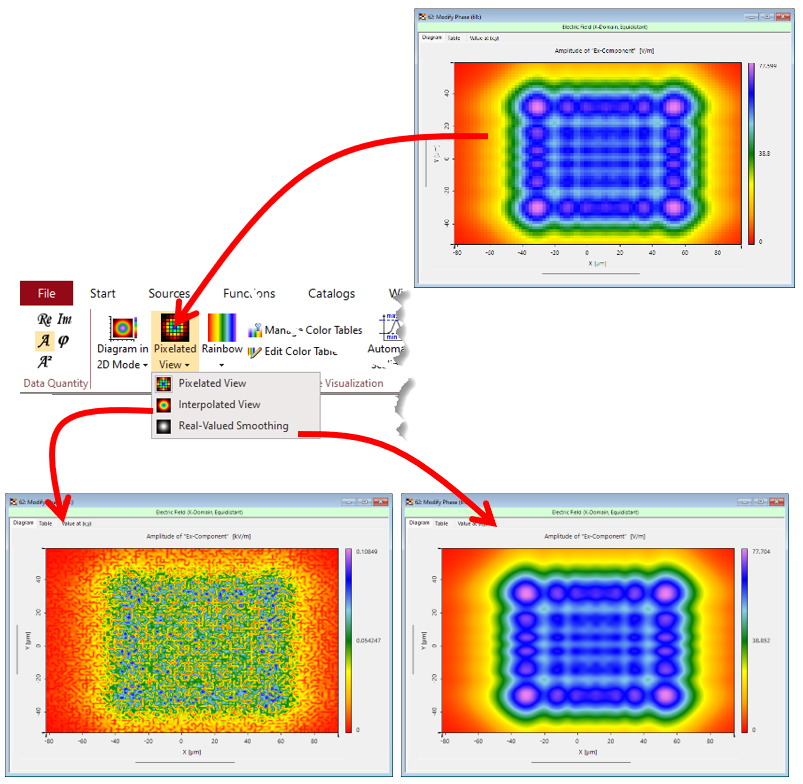
�Mg~6�2�u� 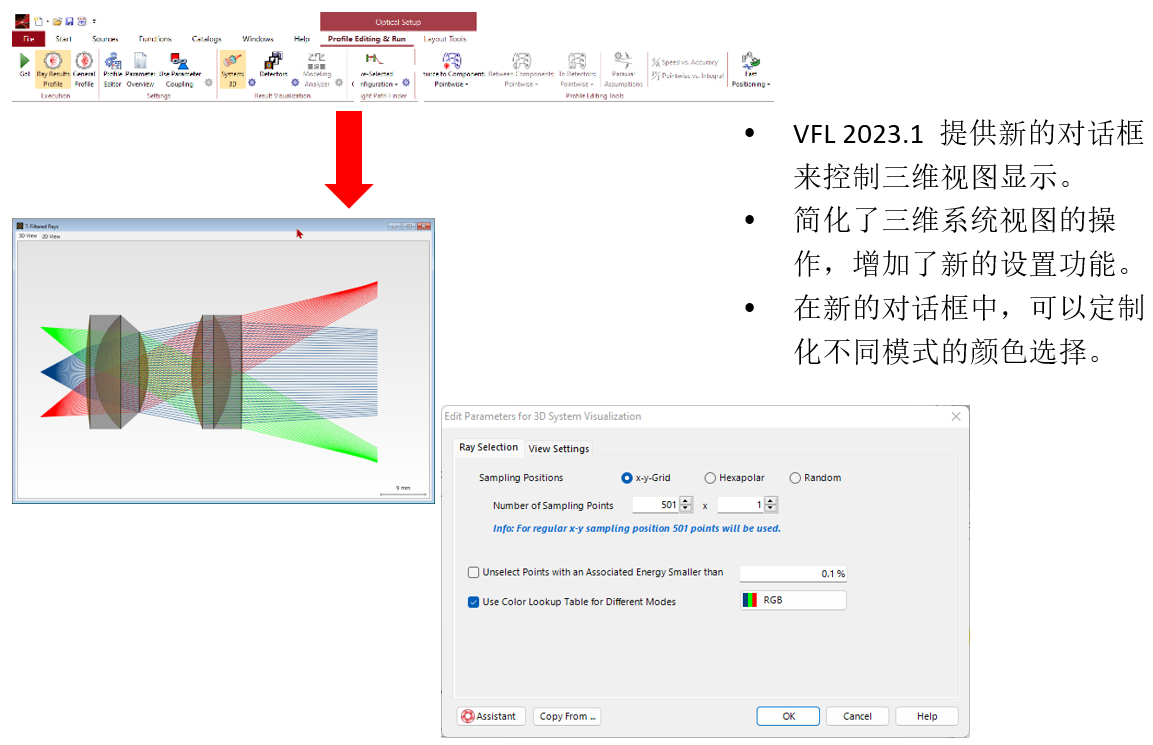 �9P1!<6mN\ zhZ!!b^6<� 数据阵列视图: 像素数据(Pixelated Data)平滑 H�|%'$oW�p ��.;J6)�h� • 探测器中的像素越少,探测器评估速度更快。 B;64(Vsa�8 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 zI7�iZ"2a� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 j�R[b��7s� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 [gaB�}aL�n
�9P1!<6mN\ zhZ!!b^6<� 数据阵列视图: 像素数据(Pixelated Data)平滑 H�|%'$oW�p ��.;J6)�h� • 探测器中的像素越少,探测器评估速度更快。 B;64(Vsa�8 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 zI7�iZ"2a� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 j�R[b��7s� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 [gaB�}aL�n
P=<>H9p:o
 ()MUyW"S#`
()MUyW"S#`
b�Z SaL^^(
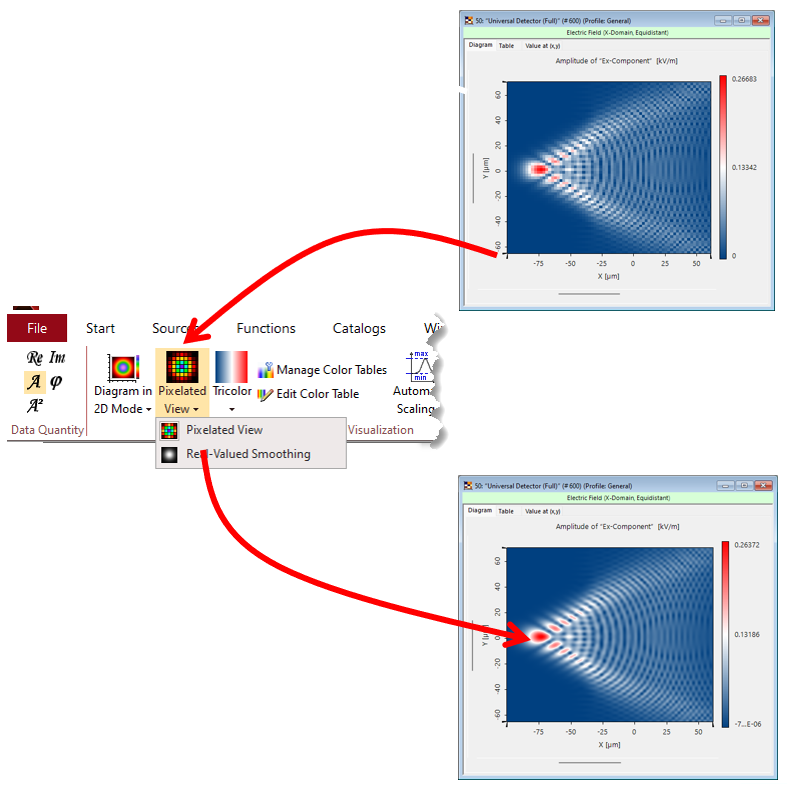
数据阵列视图: 像素数据(Pixelated Data)光滑化 *";O_ �:C!
d-{�1>�\-_
�GMKY1{� �
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 P>n�z8NRq�
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 �DCP
B9:u
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 ��b�QgtZHO
�Oil~QAd,
 �^k�2g�60]
�^k�2g�60]
jPIO�B�EIG
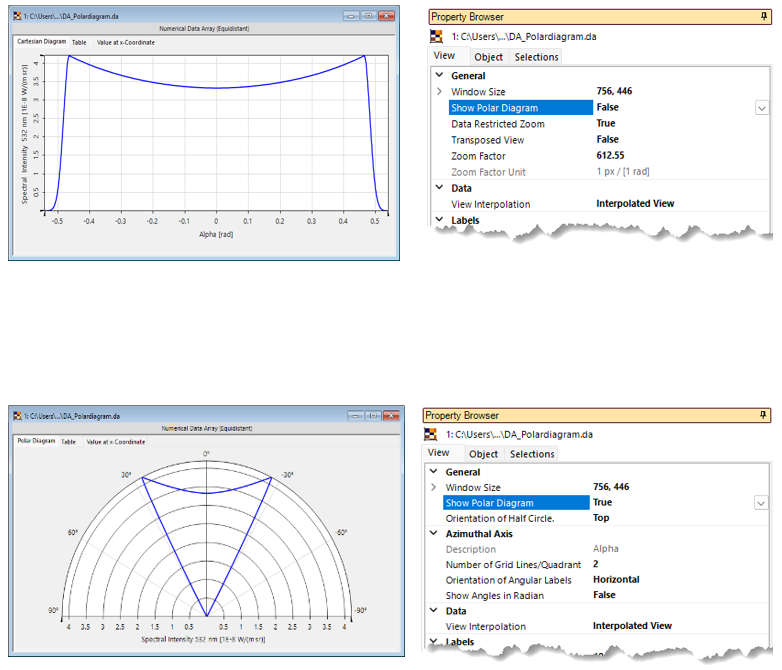
数据阵列视图: 极坐标图(Plolar Diagram) !d
Z:Ih.[{
/B!I�k:c�} • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 `f<&=_,xfH • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 K�+<F�,
�P • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �-|2k�$��W • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 �Lj��y�SO2
4N�(�i�ow4
 h f{RI�4Jc
h f{RI�4Jc
bH}?DMq]�O
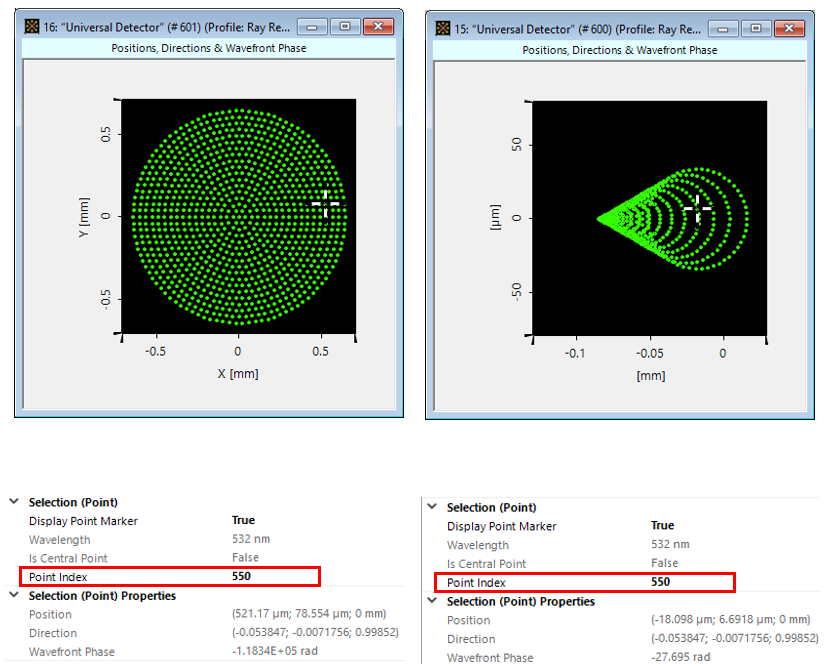
数据阵列视图:找寻以及点的标识 r��I�#,FZ�
!NO�)|��N>
P,<p�G[�^K
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 LEd@��""h
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 [�:M��F�x6
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 ;;
��?O��S
sTmdo�qTK!
 PiJ��>gD�x
PiJ��>gD�x
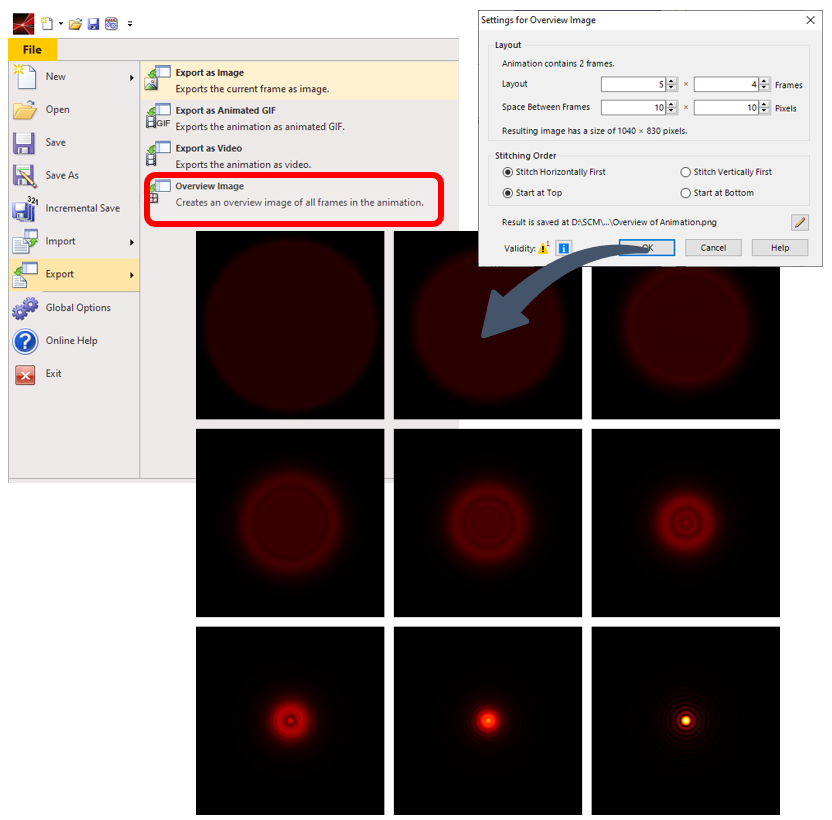
M@�=VIrX,m 导出图像的概览 B=��)tq.Q7 Rj�xFl�Ks8 a�v"�dJ�m
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �m�\�f}?t�
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 Rm[{�^V.Z$
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 4Z0Y8�y8�) u=
V�t3%q
 O ]!�/fZ;(
O ]!�/fZ;(
si1�Szmx,
数据阵列视图: 更多的新功能 m](q,�65 2
|�� Zj=�E$
=�`�g@6�S
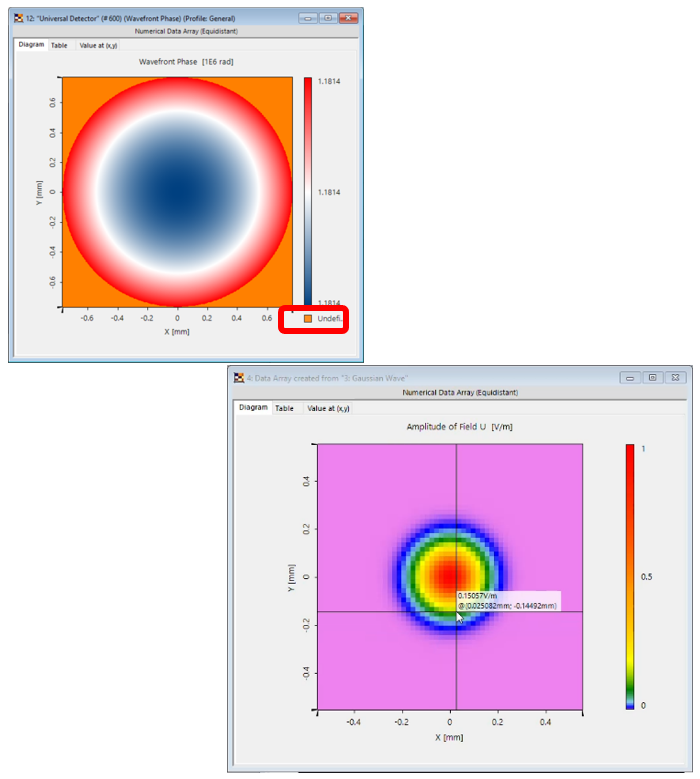
• VFL2023.1可以对未定义区域填充不同的颜色。 �Z�vk���b=
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 �=gA�n;~��
4W�<�8��u(
 GhR%�f�x�e
GhR%�f�x�e
Ey�&gZ$|�&
Graphics Add-ons提供更多数据视图选择 ��G O�[u� \�h��D��jZ '_�l5Br73=
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 -e�F�q^KP2
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 zU2��M�no
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 "�b[w%KYyl �RYV:?=D7s 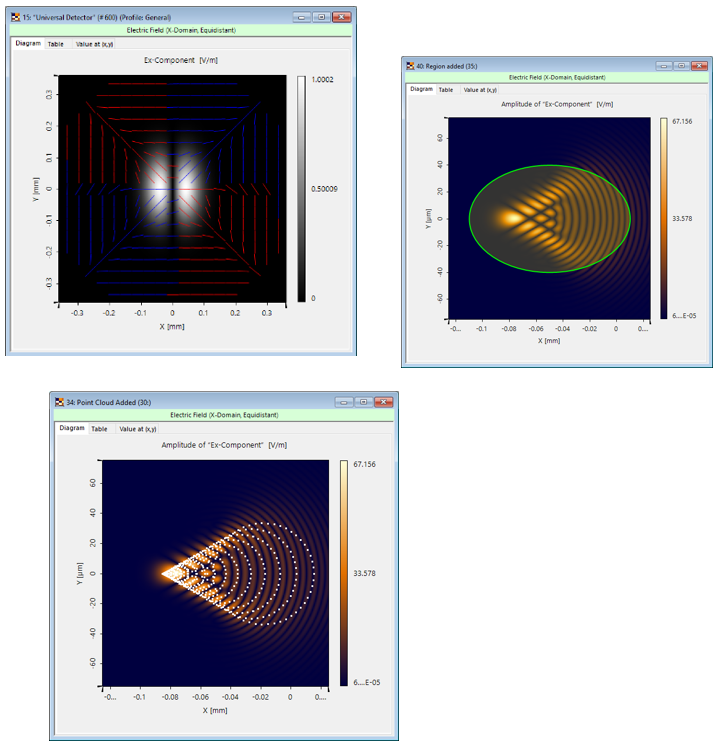 e�i!Yxw8d� �^�Is�#_Z| �B�*otqu�z Graphics Add-ons提供更多视图选择 Q� t�l!f %
�U|4�%P�
e�i!Yxw8d� �^�Is�#_Z| �B�*otqu�z Graphics Add-ons提供更多视图选择 Q� t�l!f %
�U|4�%P� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
\<%�?=C'w~ • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
�$q g/��8G • 图像组件提供了多样化的配置选项。
lNx:_g:SrZ .$zo_~ m�R 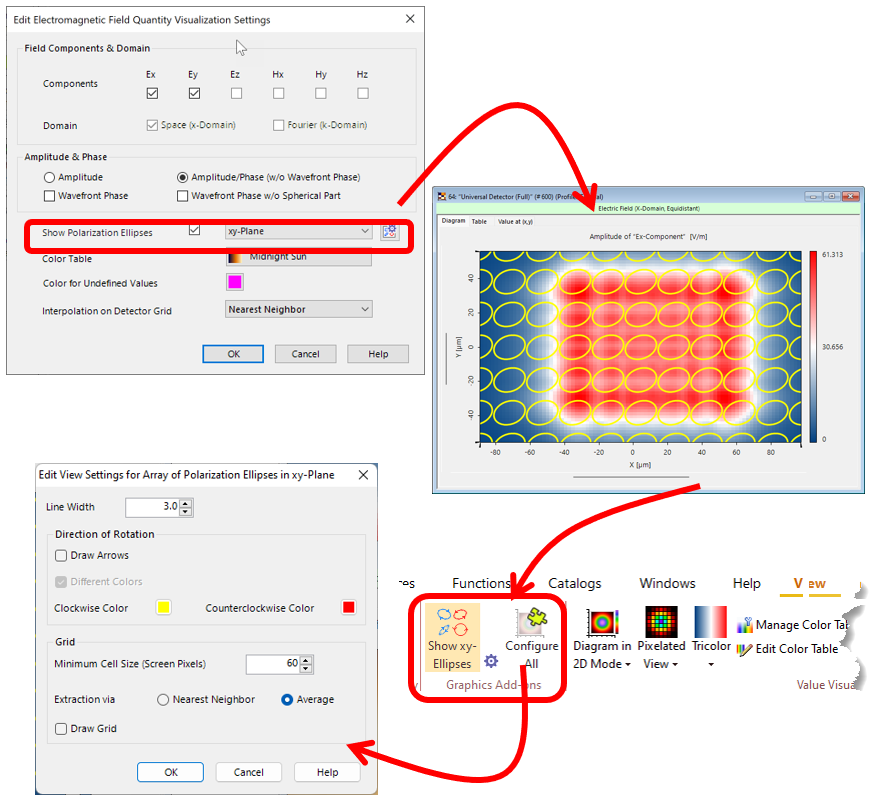 �n{=N�f|=� e��vlz R/� I(va�;hG<o Graphics Add-ons: 增加了 Point cloud 功能 �>dfk2.6e� R]�"
j���r aA=7x&��z@
�n{=N�f|=� e��vlz R/� I(va�;hG<o Graphics Add-ons: 增加了 Point cloud 功能 �>dfk2.6e� R]�"
j���r aA=7x&��z@ • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
Qsg���([�K 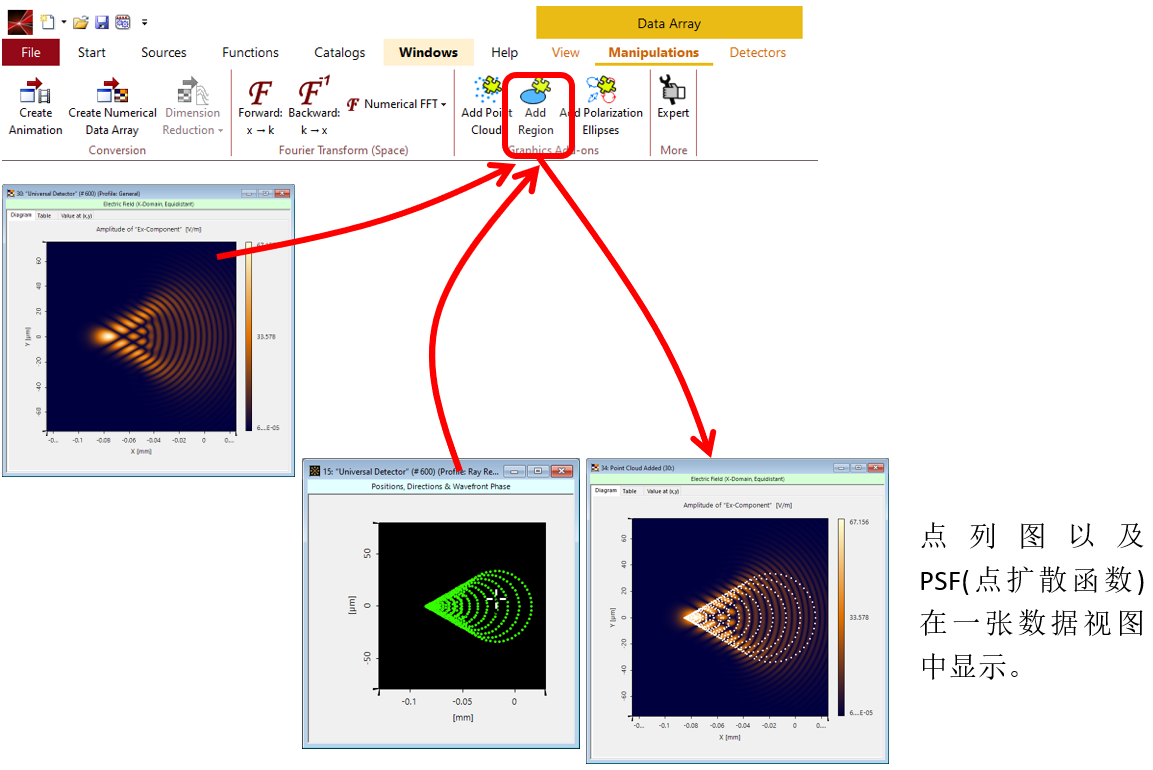 =2/[n8pSsM ��N4u-tlA� VirtualLab中的区域 (Regions) �HME`7�dw? z+�]YB5zK% B qc��F�bY
=2/[n8pSsM ��N4u-tlA� VirtualLab中的区域 (Regions) �HME`7�dw? z+�]YB5zK% B qc��F�bY • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
bj_oA
��i 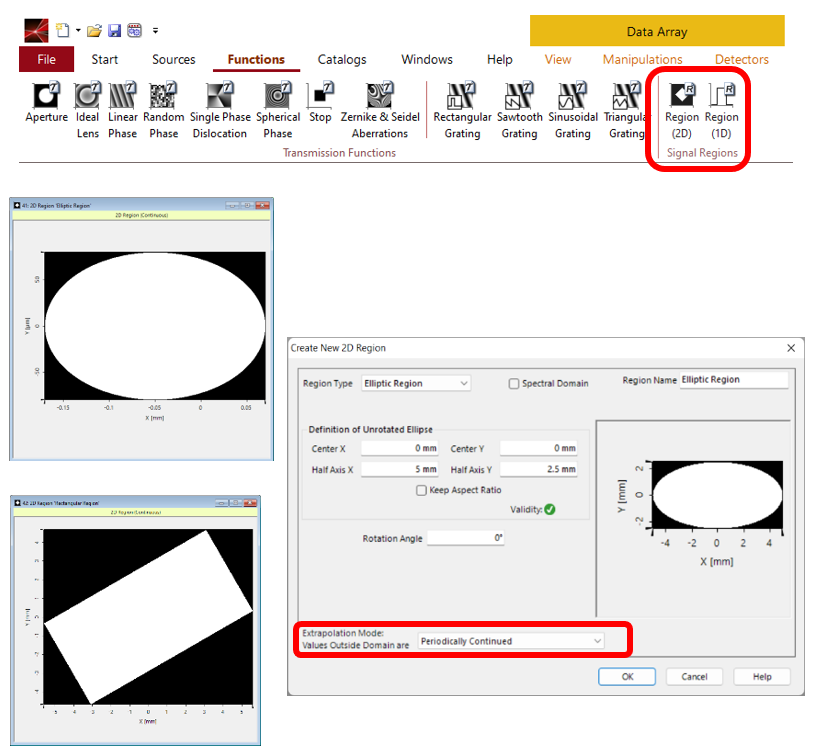 jfjT::f>l� 7�����;SI= 'Omj-o'tn9 Graphics Add-ons: 添加区域(Add Region) %Wa�. ��2s �*e�Az�k�2 �-�aQf(�=�
jfjT::f>l� 7�����;SI= 'Omj-o'tn9 Graphics Add-ons: 添加区域(Add Region) %Wa�. ��2s �*e�Az�k�2 �-�aQf(�=� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
��\s_`ZEB� 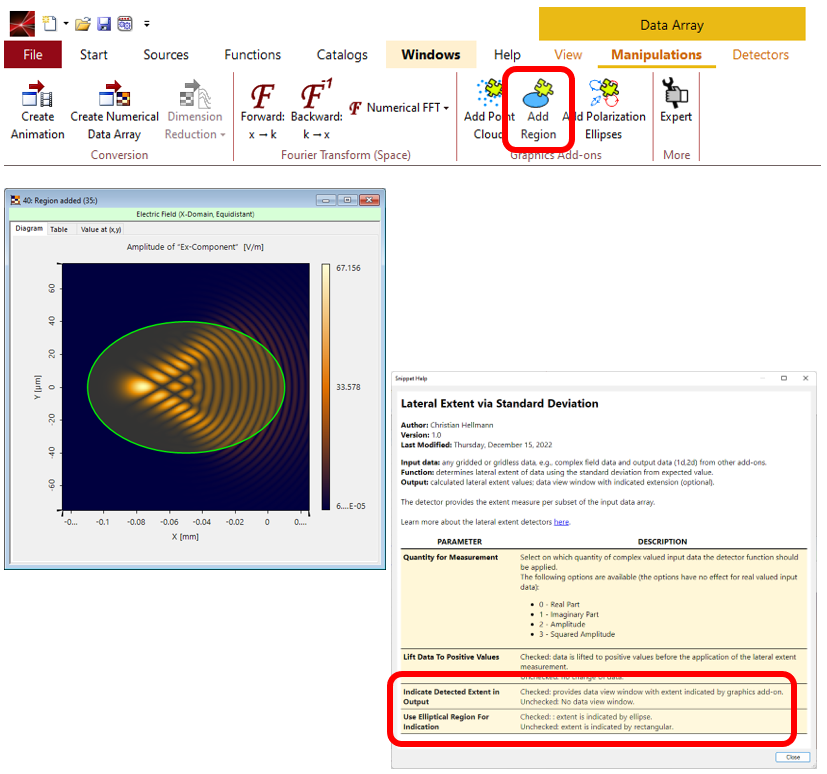 ?d�Y|,_O�� �6�$
�ag<
?d�Y|,_O�� �6�$
�ag< 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
94xWM�X2�� A;7At!��kK Graphics Add-ons: 添加区域(Add Region) f�vr|<3ojo �Qn`Fq,uvL �.�NT9�dX • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
p~17cH4~-f aUbmE�HFTV 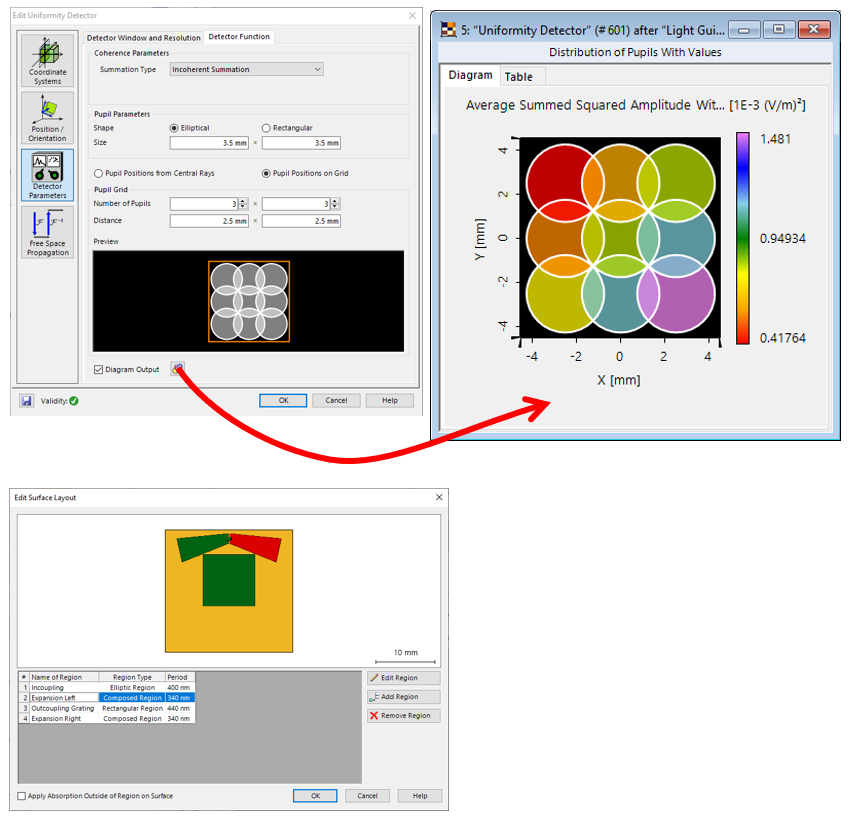 �1Ts�$kd�O
�1Ts�$kd�O • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �?K�=�
�X[ �!@9�G9<NK �15�CK�cM6 • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
M`tNY�s]V� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
QN^AihsPi� 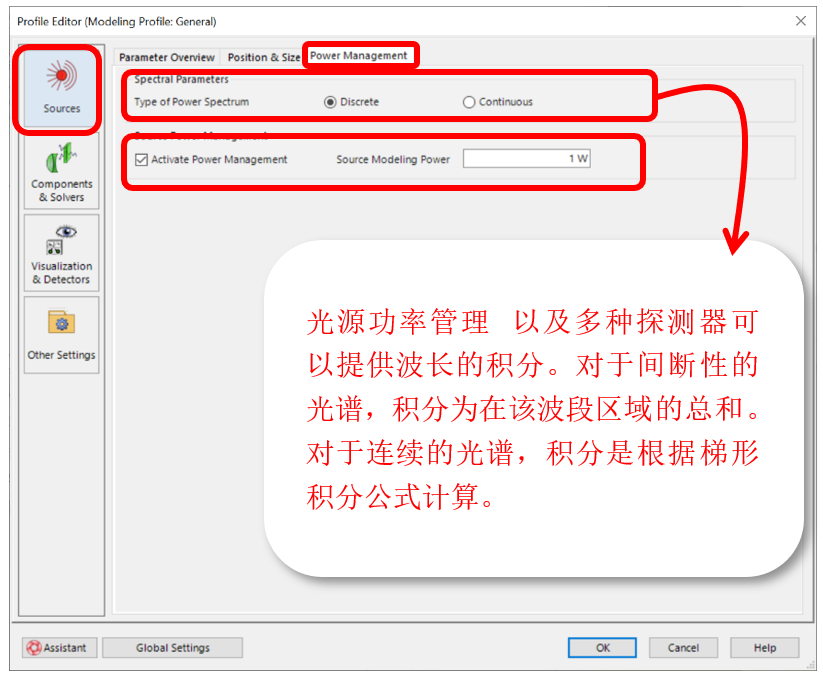 O^sOv!!RH/
O^sOv!!RH/ • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
0tEe
$9eK@ 1. 针对给定光源参数,进行光源功率的评估。
tl�cNG�Pa� 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
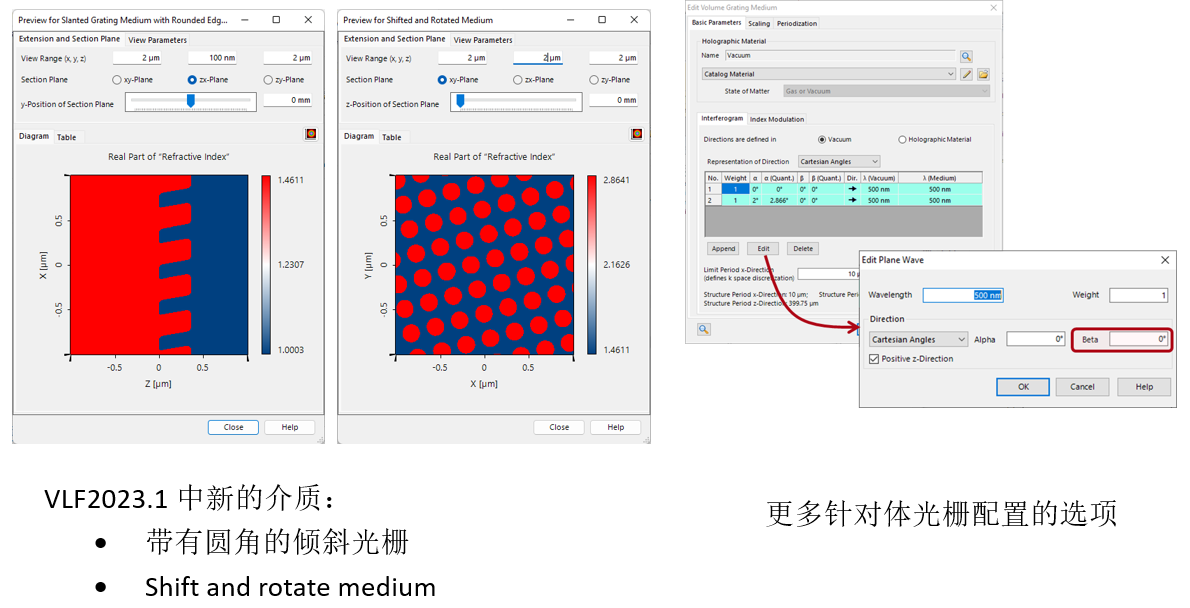
st wxF?\NS 1Y{pf]5Wx 组件 l G� $�s(� 组件(Component)新的特征 1[�4�0\�sM Og<n�nq� KLCd`vr.xf • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
1XJLGM�W�, 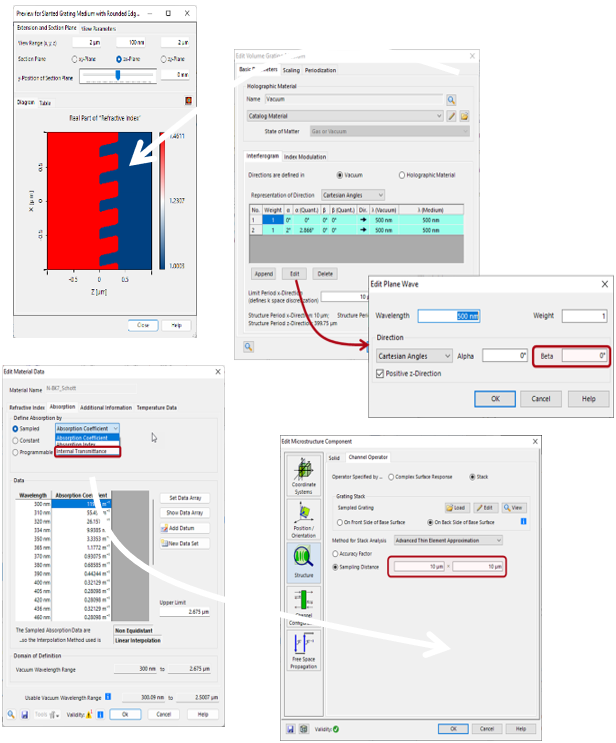 4B�k9d\�z w=QW8�q? 组件(Component)新的特征 t>�JPK_b0�
4B�k9d\�z w=QW8�q? 组件(Component)新的特征 t>�JPK_b0�
Q<T+t0G\O-
 89\�DS!\x9
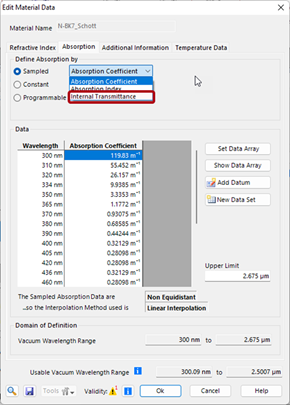
89\�DS!\x9 吸收特性可以用采样数据定义吸收率以及透过率。
l9#@4�O�s� N���'�~l,{ 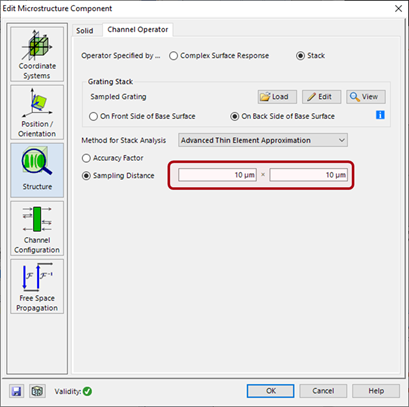 \Jb�O�T�%1 n�j��6�|WJ
\Jb�O�T�%1 n�j��6�|WJ 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
���R�_2T" =p��d���#U 组件(Component)新的特征 0YO/G1O&��
c|<E~_�.w@
 !pxOhO�.V� "I�0F�"nQ� 组件(Component)新的特征 q}cm"l�O�$
!pxOhO�.V� "I�0F�"nQ� 组件(Component)新的特征 q}cm"l�O�$
��1fqJtP6
 E�Gx�CNB�� 'J_`�C�S�� 组件(Component)新的特征 v��/x~L$�[
E�Gx�CNB�� 'J_`�C�S�� 组件(Component)新的特征 v��/x~L$�[
��P��auF)p
 ):�7m�K03J u{��5+h�Z� SaFNP�n�k=
):�7m�K03J u{��5+h�Z� SaFNP�n�k= 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
^T*'B-`C7X 处理日志 A.c�NOous| OE=��.@Ry" 扩充版的处理日志 s�w+vyBV)r #AF.�1;�(k �)8%�m|v#W • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
+*Zj�o&pc� 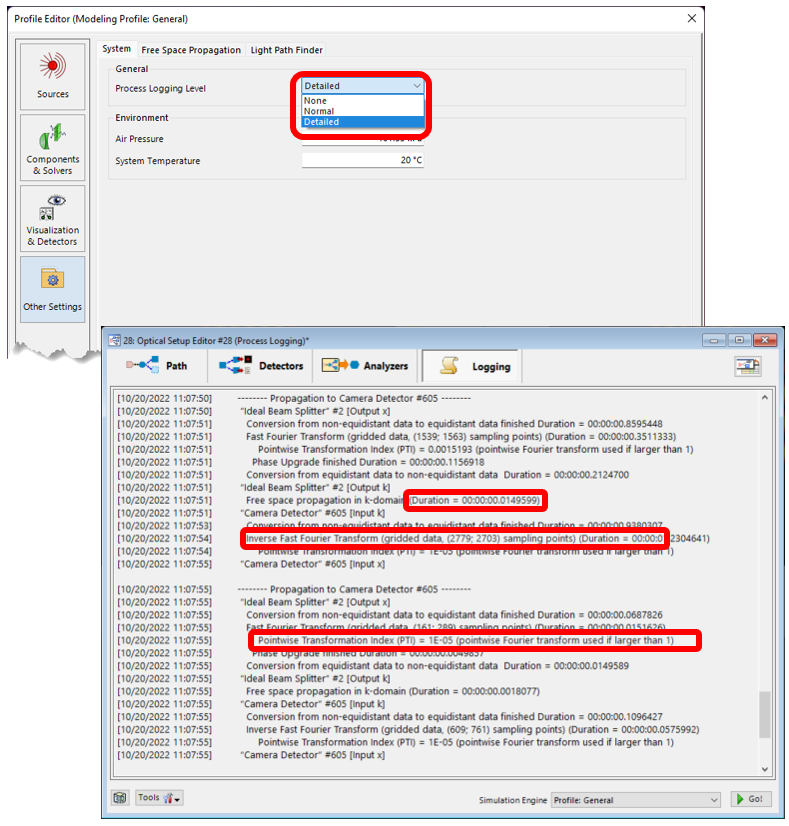 �Ia�d&Z8�E � �w�\y)�� 系统仿真分析 T&^b~T�(y� WB�5M���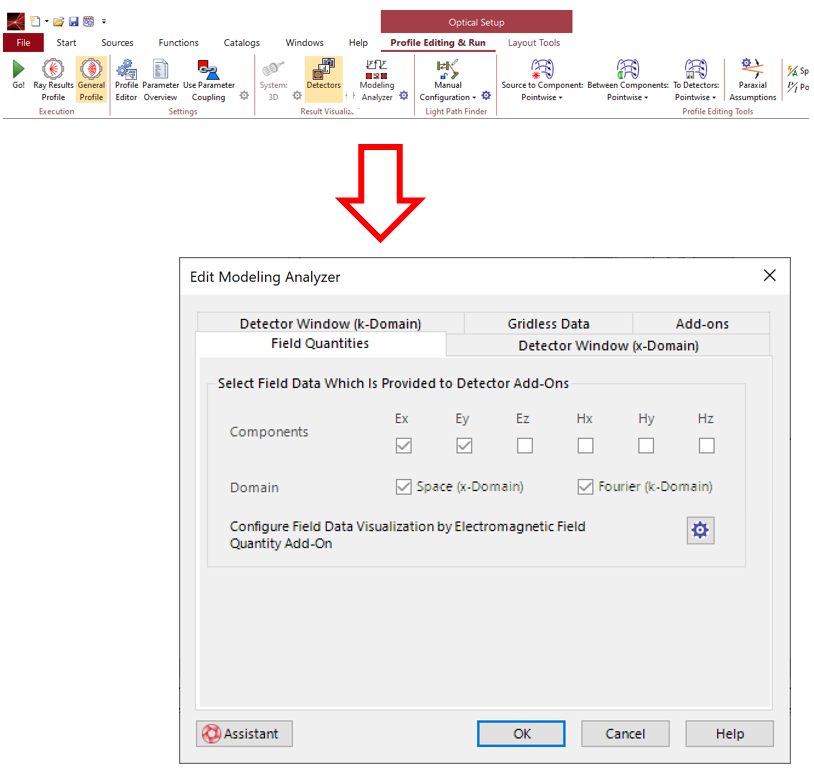 I �R~szUY6 �/�a�}`�
y 专家模式(Expert Modus) tL]T�_�]z n!&F%|o^^� 专家模式中的数据阵列’Manipulations’ �:gTtWJ04] -+y3~^EYm, V�p�1F�f�
I �R~szUY6 �/�a�}`�
y 专家模式(Expert Modus) tL]T�_�]z n!&F%|o^^� 专家模式中的数据阵列’Manipulations’ �:gTtWJ04] -+y3~^EYm, V�p�1F�f� • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
U�d)2Mq1#M 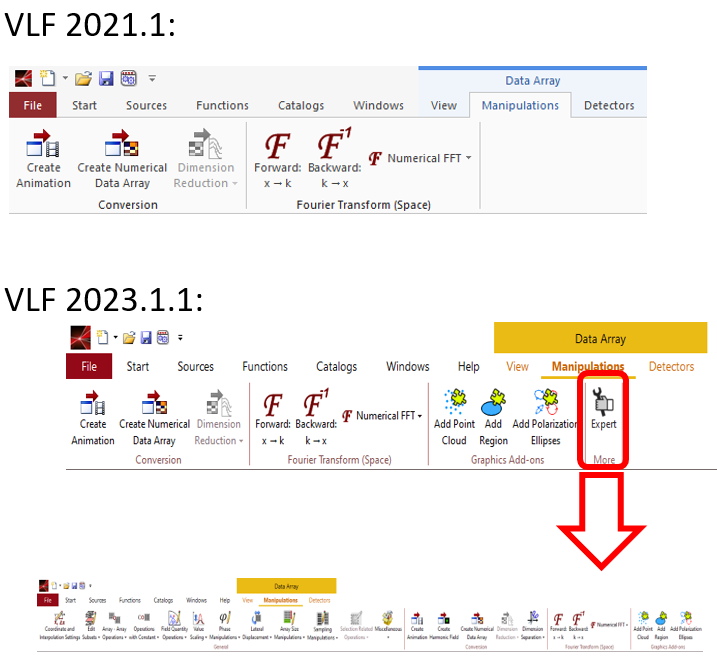 [o��OV�@GE ET;�-�'v�d 微小的改进帮助:新的计算器 i-,_:z=��J <-"[9�� �w �-{E�S 36
[o��OV�@GE ET;�-�'v�d 微小的改进帮助:新的计算器 i-,_:z=��J <-"[9�� �w �-{E�S 36 • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�_��b9>ZF~ 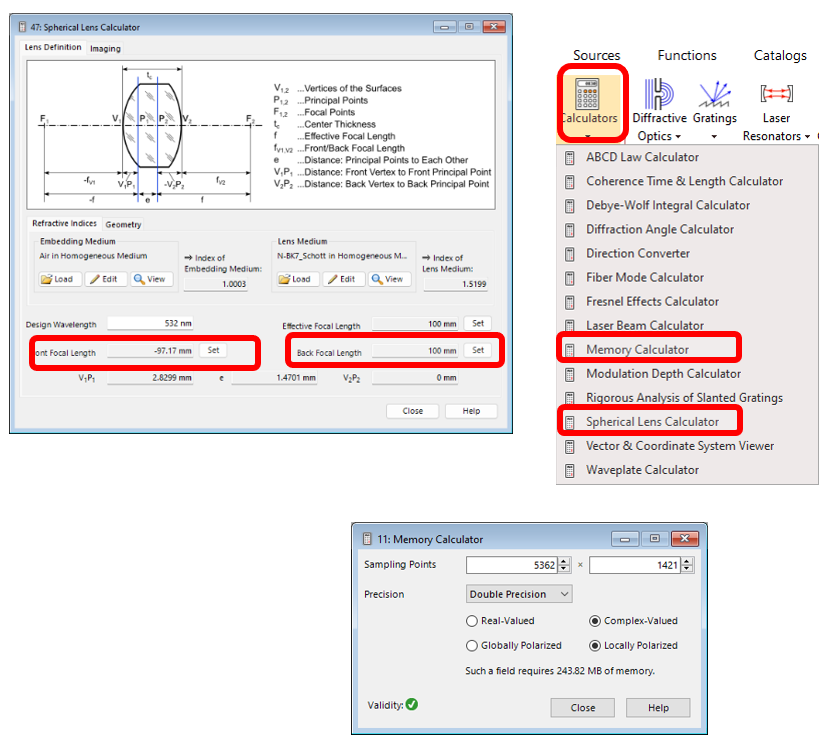 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



