2022 年 12 月,发布 VirtualLab Fusion 2023.1 C��wwZ~�2� VirtualLab Fusion 2023新版本更新内容(三) l]�S%�k�& 2023.1版本新特性一览 "���/����d Ua�c.8w�Qh 基本信息 t<MO�~_`�!
��WZcAw�YB
 ��U�P*5M�
��U�P*5M�  �sU"sd7�#A
�sU"sd7�#A VirtualLab Fusion 2023.1新版本
主要更新方向 U;L�X"�'�}
 �'L��C0hoV
�'L��C0hoV
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 n,`j~.l-=>
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: 2�j�=Hx�E�
- 更快的速度 /]9�(InM9/
- 更容易使用 $j/#Iz�D1D
- 融合更多物理光学模型 =J'&.@Dwz
- 更高的透明度 �,y�g�DN�F
- 多元的仿真控制选择 �*��&�~
�'
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 X08�[,P#�I
.G�IygU�_�
�-V=,x3Zew
功能概述(以下为更新内容的详细解释和案例展示): lFa?l\jLXZ
数据视图 =�,Z5F`d�4
4VHX4A}CgA VLF 2023.1数据视图 [midNC�+,� .q�rS[�� w 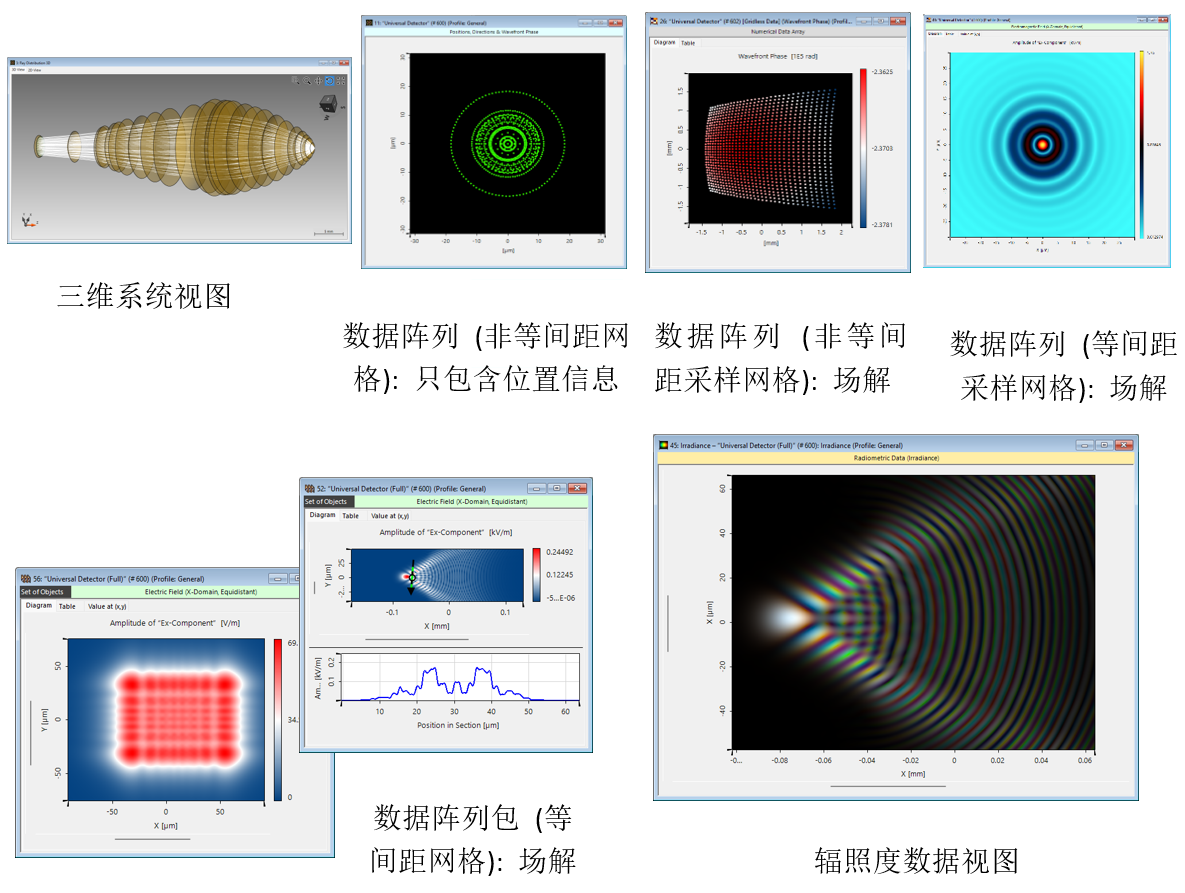 7���A��Qv4 a|Wrc�)U�R VirtualLab Fusion 2023.1数据查看方式 [@/s!� i @
7���A��Qv4 a|Wrc�)U�R VirtualLab Fusion 2023.1数据查看方式 [@/s!� i @
lF��~!F<^9
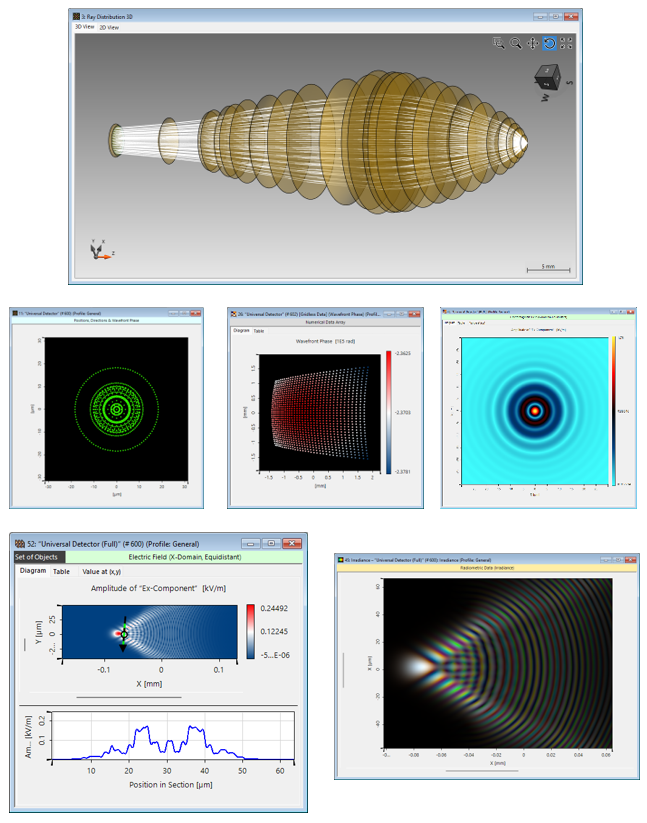 5W(`lg�Vs, >Zh^�,T={G 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 o&Y
R\BI�/ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。
��/�~pB_l 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 "=�yz�}�~, 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 z�A8�Tp8(� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 {VK��P&{~O
5W(`lg�Vs, >Zh^�,T={G 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 o&Y
R\BI�/ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。
��/�~pB_l 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 "=�yz�}�~, 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 z�A8�Tp8(� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 {VK��P&{~O
Js�D��T��
_�C@<*L=Q
三维系统视图: 新的对话框以及设置选项 cQ(,�M����
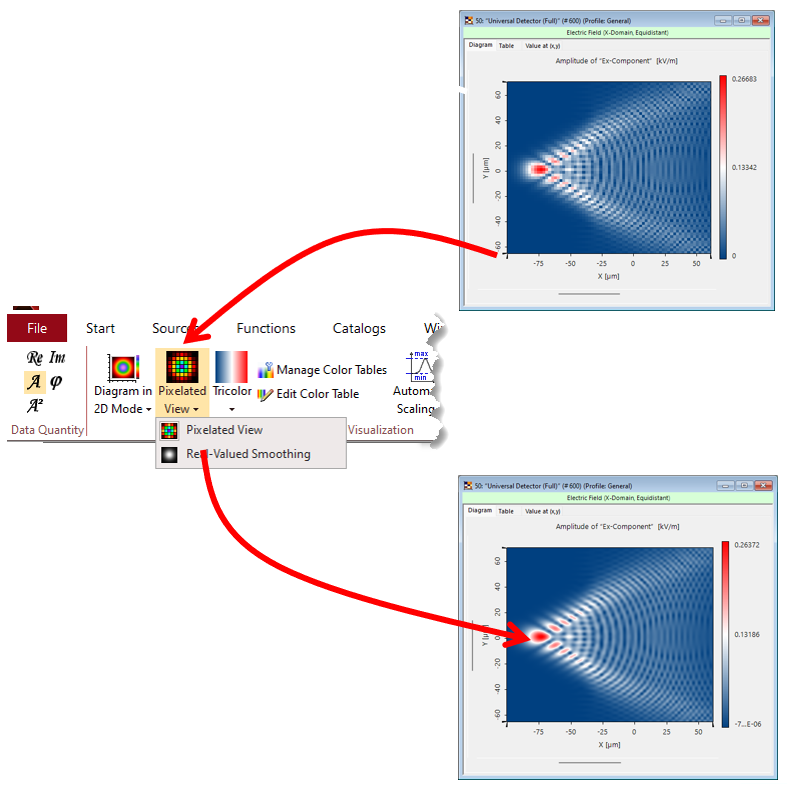
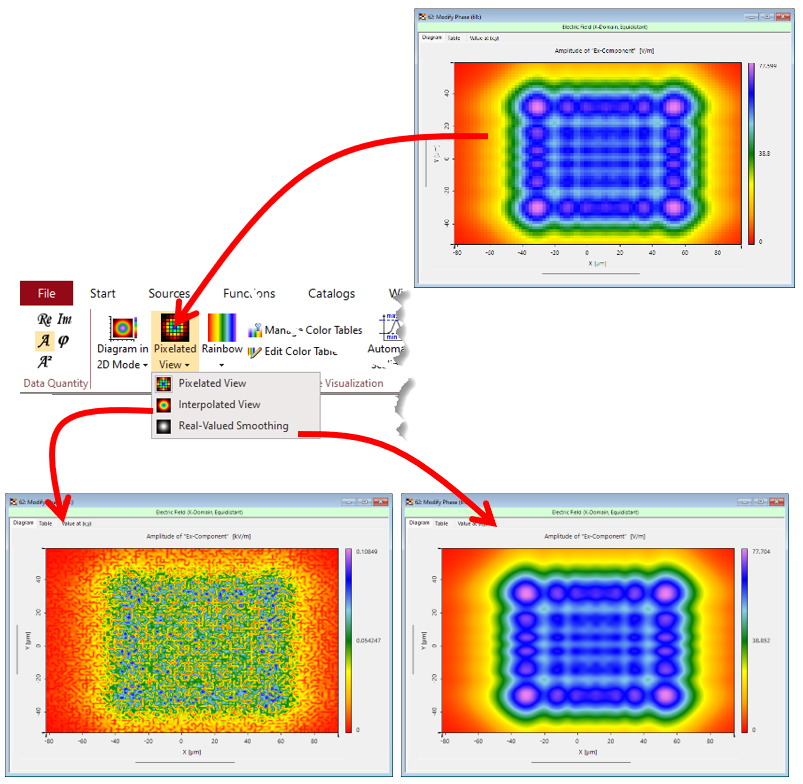
bpdluWS+�) 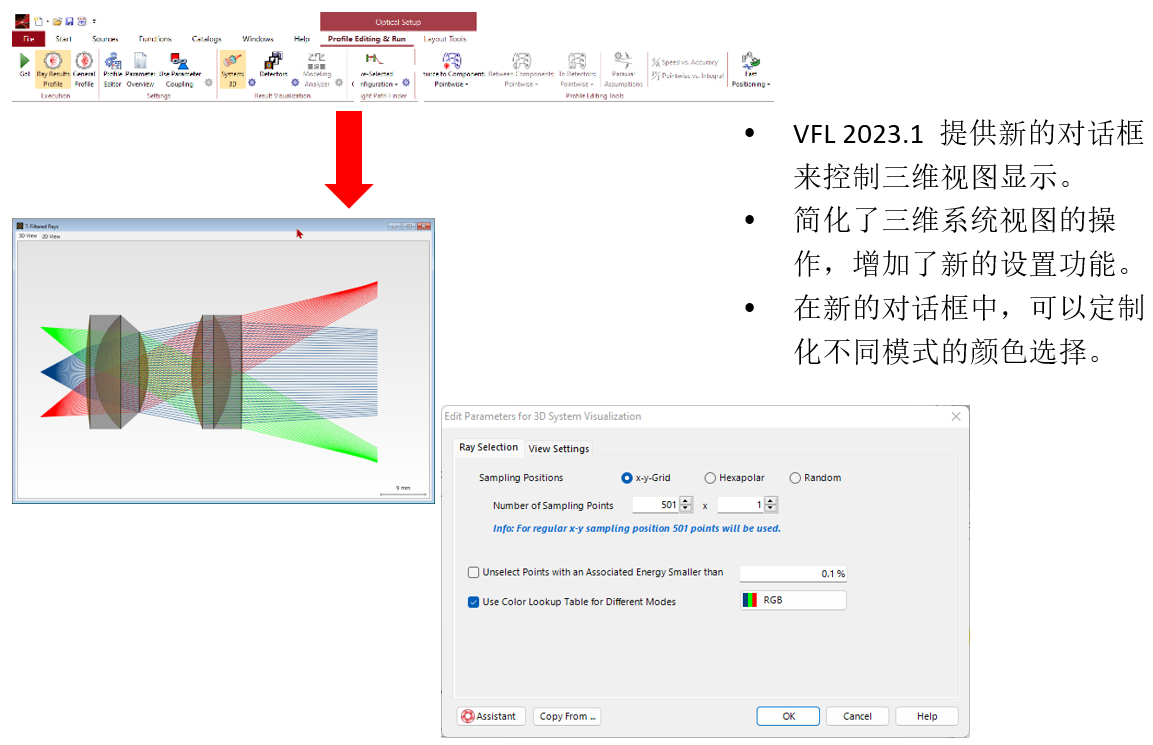 �spma\,��o ��3 ]w a8| 数据阵列视图: 像素数据(Pixelated Data)平滑 kg^5D3!2{Q <"nF`'ol�V • 探测器中的像素越少,探测器评估速度更快。 @*iT%p_�L� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 3]�67U}`� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 + De-U.��� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 Wt!8�.d}�=
�spma\,��o ��3 ]w a8| 数据阵列视图: 像素数据(Pixelated Data)平滑 kg^5D3!2{Q <"nF`'ol�V • 探测器中的像素越少,探测器评估速度更快。 @*iT%p_�L� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 3]�67U}`� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 + De-U.��� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 Wt!8�.d}�=
:.S��wO�<j
 vW�jHH��w�
vW�jHH��w�
@^�n�E^;�
数据阵列视图: 像素数据(Pixelated Data)光滑化 n\u3$nGL1`
B*n_�
VB�d
E+~�1GKd��
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �fnK� H<�
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 j�){�0>O.V
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 t��LM/STb6
�)npvy>C'(
 �|�v:fP;zc
�|�v:fP;zc
)zu m.6p�T
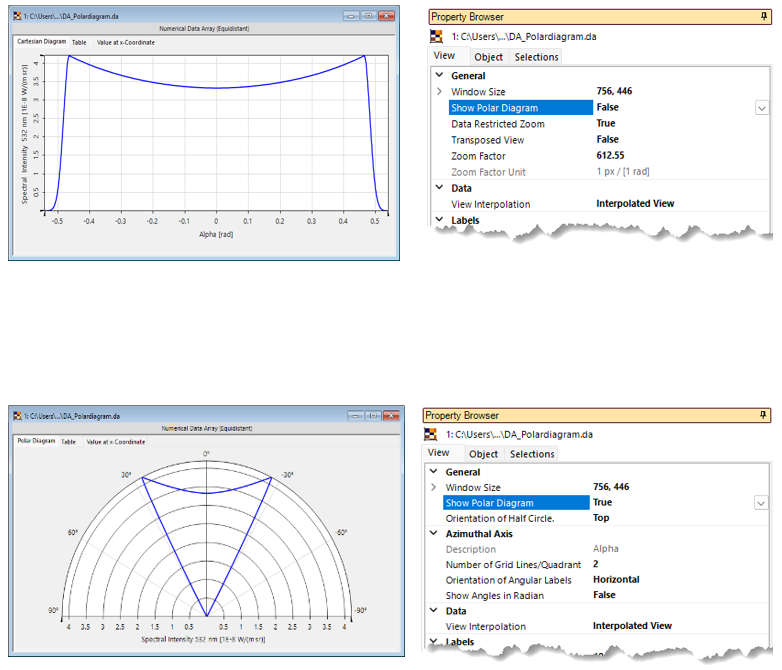
数据阵列视图: 极坐标图(Plolar Diagram) 51`*VR]`K�
bM"d$tl$?' • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 U���[�NQ"� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 G@��r���V9 • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 q5~"8]D�ls • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 :xC1Ka%~��
Pl&�x6�\zL
 >g2Z t;*@w
>g2Z t;*@w
�C�W?R7A/�
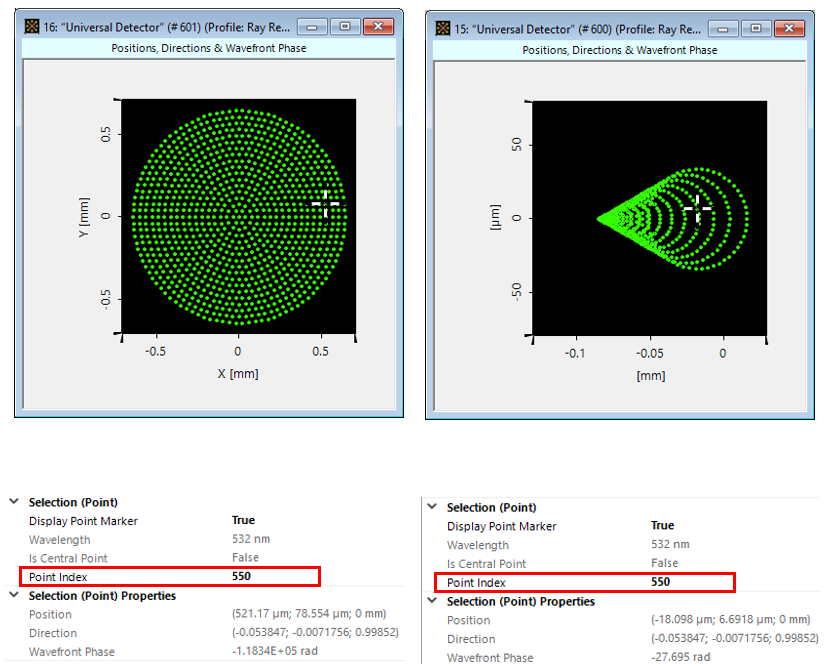
数据阵列视图:找寻以及点的标识 *y��N#q�>1
+d=8�/3O%�
_A6e|(.ll�
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 2E@�g�#�:3
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 %Q�QJSake|
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �+7j7z�p�w
OD).kP�}s^
 )No>��Q :t
)No>��Q :t
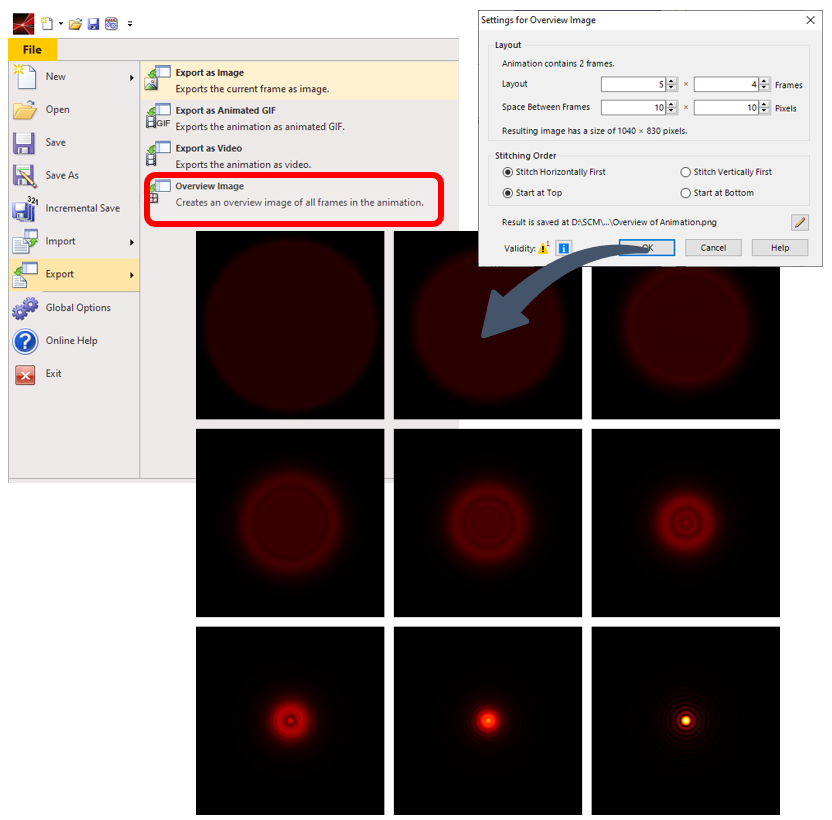
~�2O1$o��u 导出图像的概览 v�[<;z(7Qk �!XT2'�6nu ��^��-%��O
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �1=m�b�2A�
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 ��:@^�T^
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 nI,-ftMD-| 6�&6���t=�
 _o{��w<b&�
_o{��w<b&�
%��h&���F�
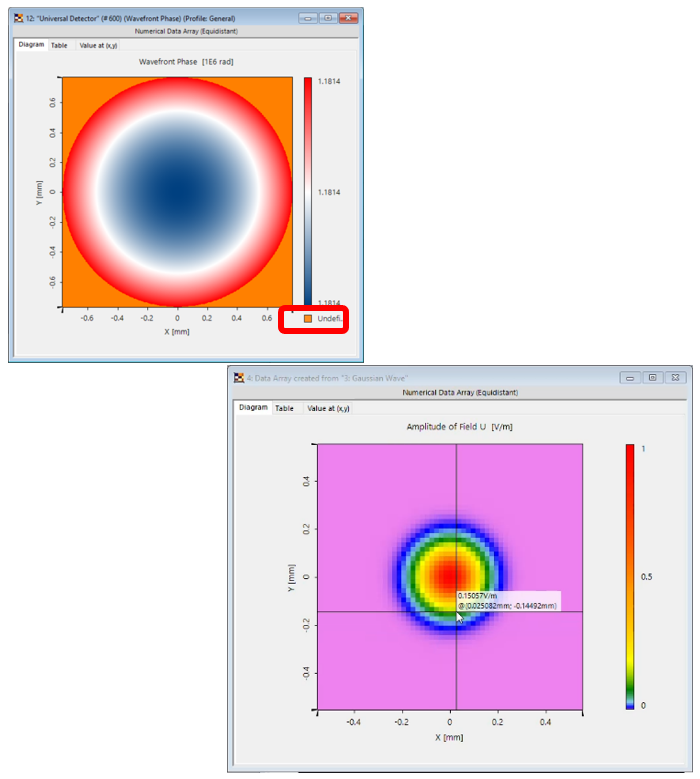
数据阵列视图: 更多的新功能 bjq�l<x5d�
#=��cz�qZw
-�x+K#�T0Z
• VFL2023.1可以对未定义区域填充不同的颜色。 @Mf�Z�P~T+
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 f�DK�V��`�
Ummoph7�_@
 &@z
M<A���
&@z
M<A���
SFVq�Ug3"Z
Graphics Add-ons提供更多数据视图选择 :F
p�t>�g� $q0i=l&$&� �E6c���lVa
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 8W�LBq-]G
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 $TF�Wum9wO
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 0E/�16@�6= '�h��`)�6{ 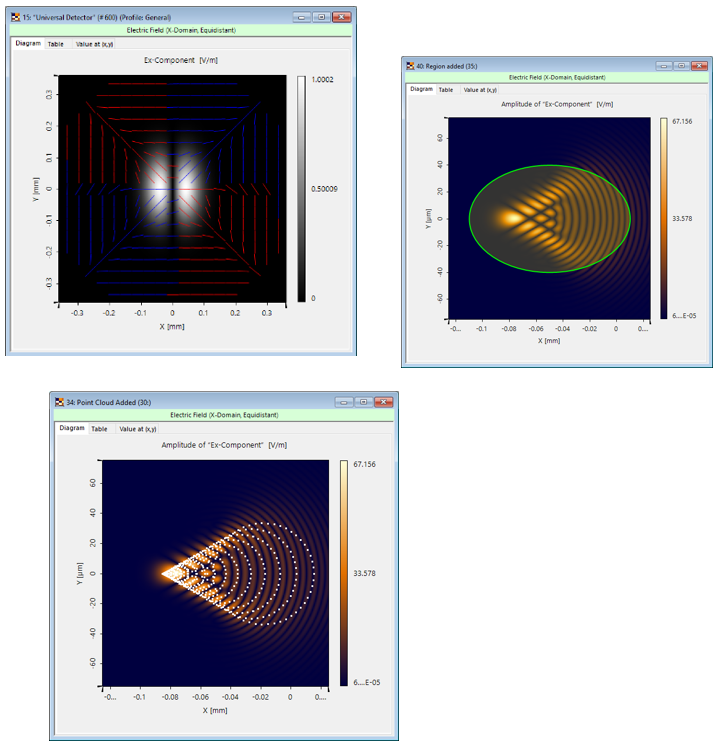 3E�A`]&d>� YkI�_i��(� �jGtu�>|Gj Graphics Add-ons提供更多视图选择 II{"6�YI>� W�"\��O+�
3E�A`]&d>� YkI�_i��(� �jGtu�>|Gj Graphics Add-ons提供更多视图选择 II{"6�YI>� W�"\��O+� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
��(R�I+4V1 • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
U]
��av{}U • 图像组件提供了多样化的配置选项。
D��U�v���F 6kdcFcV�-] 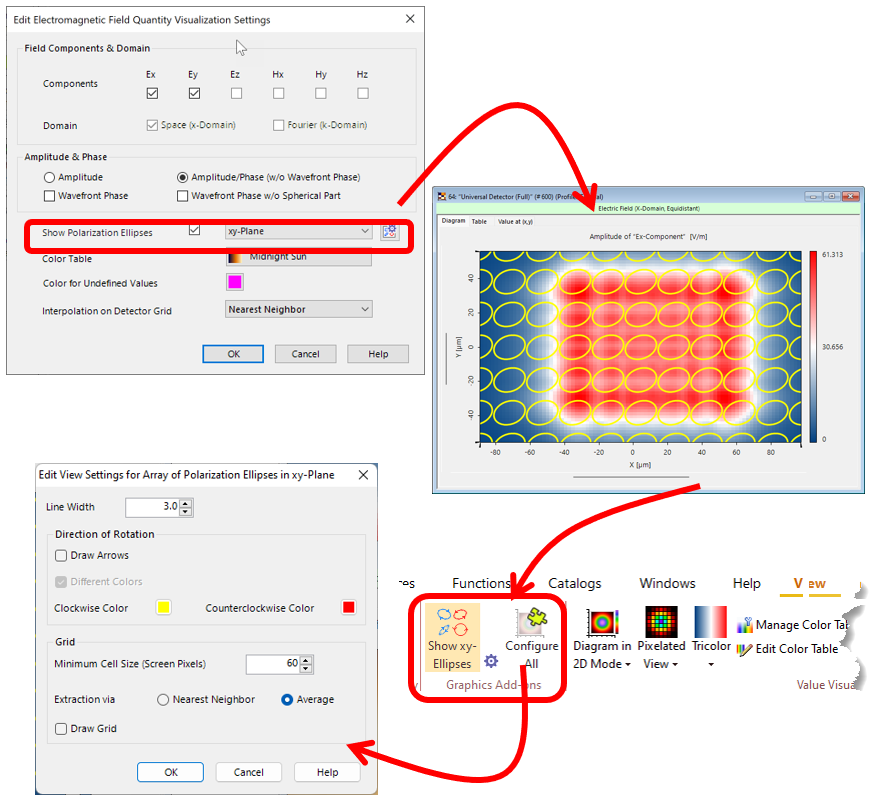 5k�`D��f�/ ZW`wA2R0
� rWN%Tai-� Graphics Add-ons: 增加了 Point cloud 功能 -~�&T�0dt~ �q�8�2y�h& �'%Ka�Ai�$
5k�`D��f�/ ZW`wA2R0
� rWN%Tai-� Graphics Add-ons: 增加了 Point cloud 功能 -~�&T�0dt~ �q�8�2y�h& �'%Ka�Ai�$ • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
@P�6�*4W� 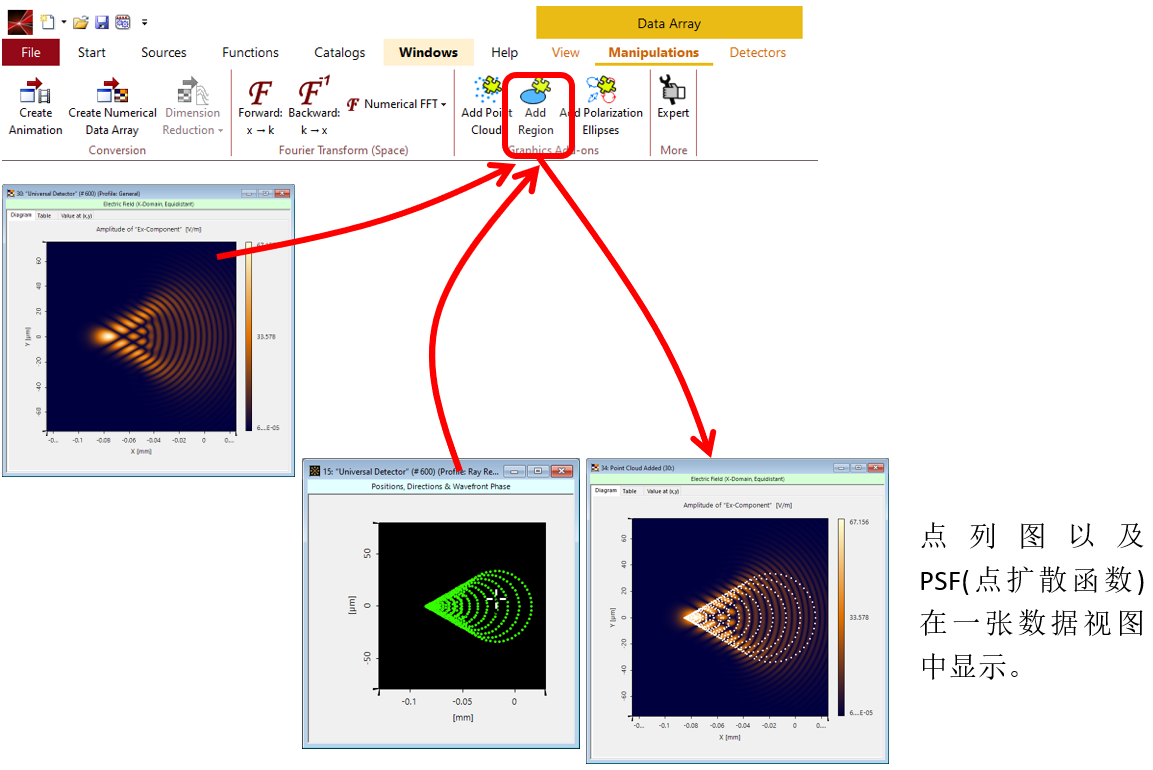 I0}��G�,
q j&Y{
CFuZ� VirtualLab中的区域 (Regions) Io]KlR@!T m��xmj��� UUqA^�y��J
I0}��G�,
q j&Y{
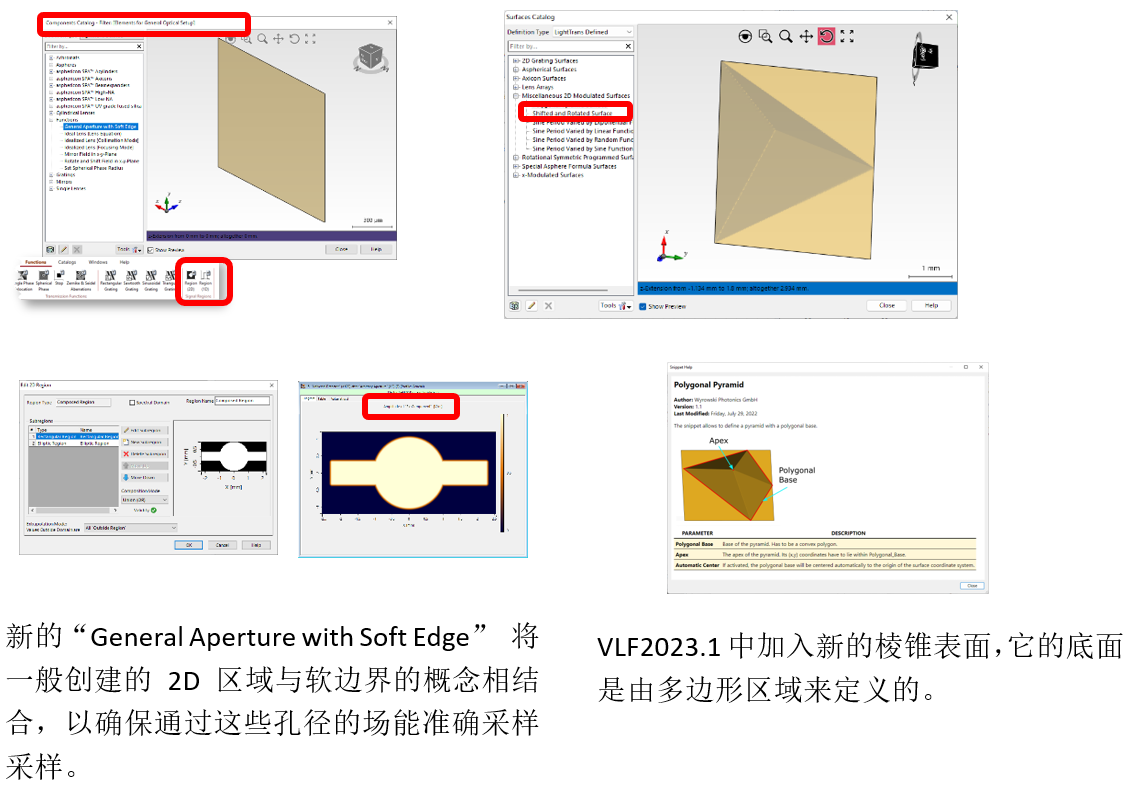
CFuZ� VirtualLab中的区域 (Regions) Io]KlR@!T m��xmj��� UUqA^�y��J • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
N�JPp�6RZ% 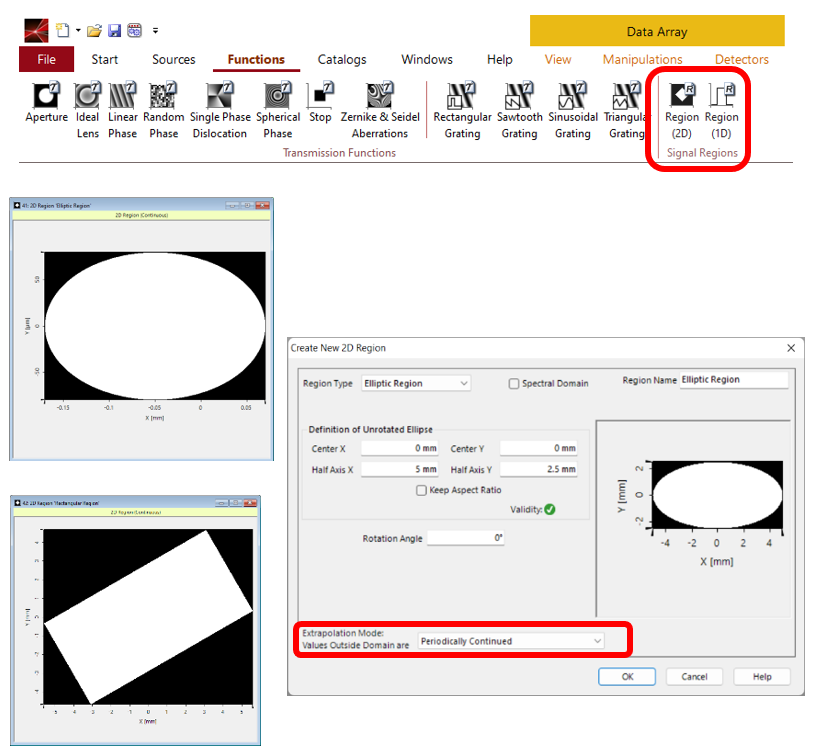 >JT^�[i8[� ]�w~ECP(ap �eOs�4�c�` Graphics Add-ons: 添加区域(Add Region) v�6O5n(5,, l#r�r--�]; ���`W'S'?$
>JT^�[i8[� ]�w~ECP(ap �eOs�4�c�` Graphics Add-ons: 添加区域(Add Region) v�6O5n(5,, l#r�r--�]; ���`W'S'?$ • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
q;9O��qArq 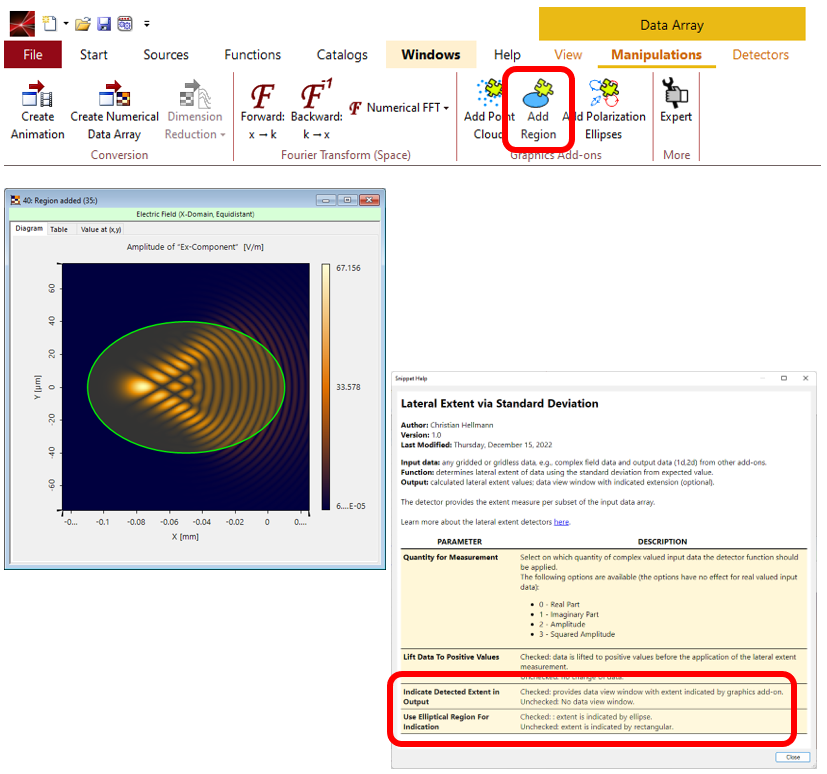 RBV*e9�P%� �tJ M����m
RBV*e9�P%� �tJ M����m 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
dS;Ui�]/J� 8eD/9PD�=F Graphics Add-ons: 添加区域(Add Region) �c!J�|vRA5 ��@%rj1Gn� -[�xbGSj�{ • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
�-5�<G^AS� _!^��2A3c< 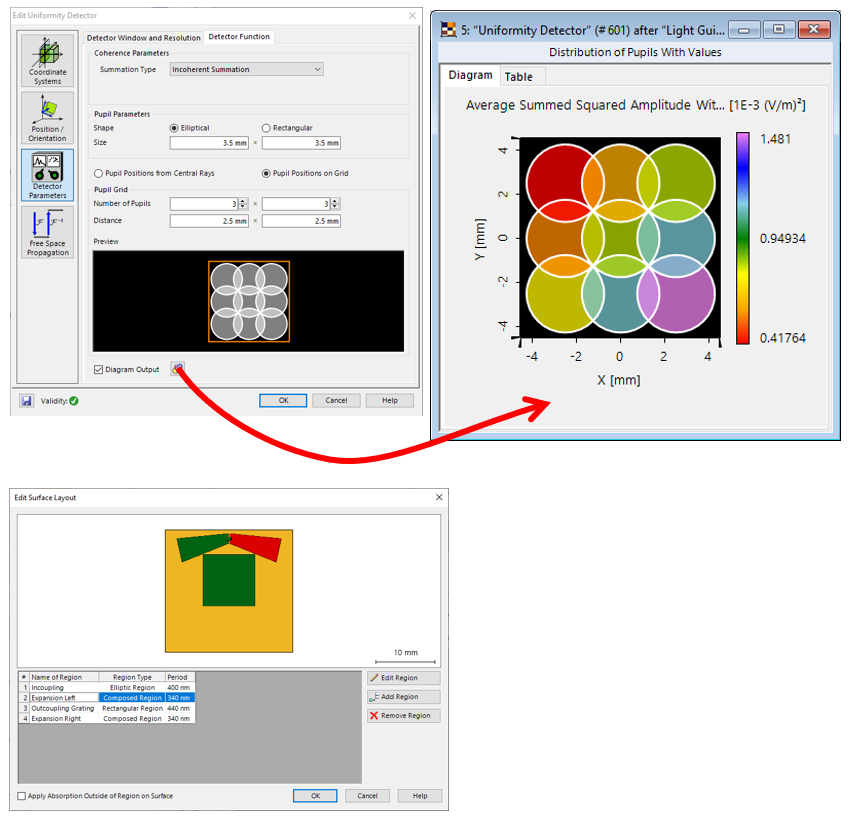 �`�2@f�=$B
�`�2@f�=$B • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 MsjC4(Xla. c<�imqDf�� a_k~z3w�G� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
?xb2jZ/�0X • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
V(��3rTDg� 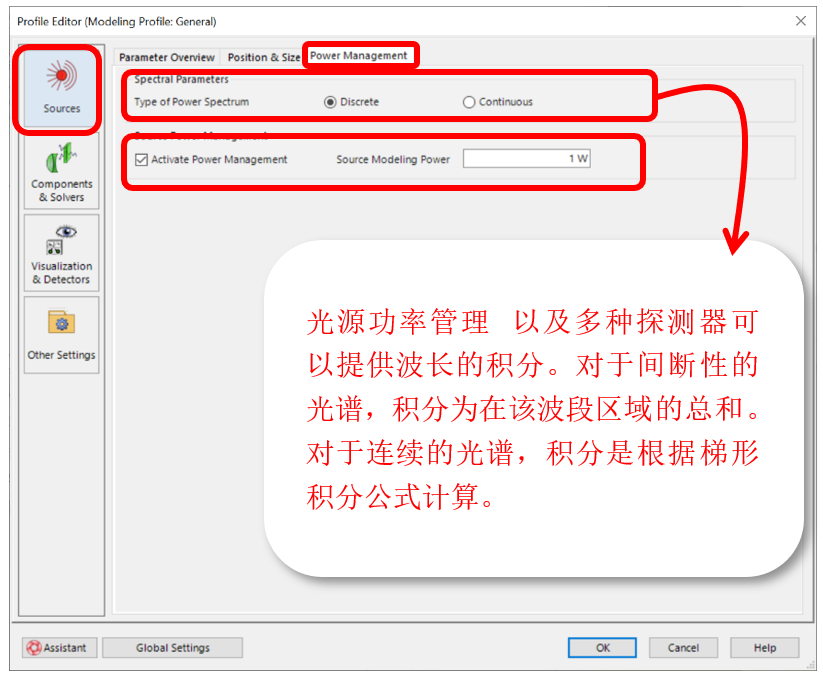 �j:�xm>X'�
�j:�xm>X'� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
{/�K!c�Pp9 1. 针对给定光源参数,进行光源功率的评估。
gwN
y��]�! 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
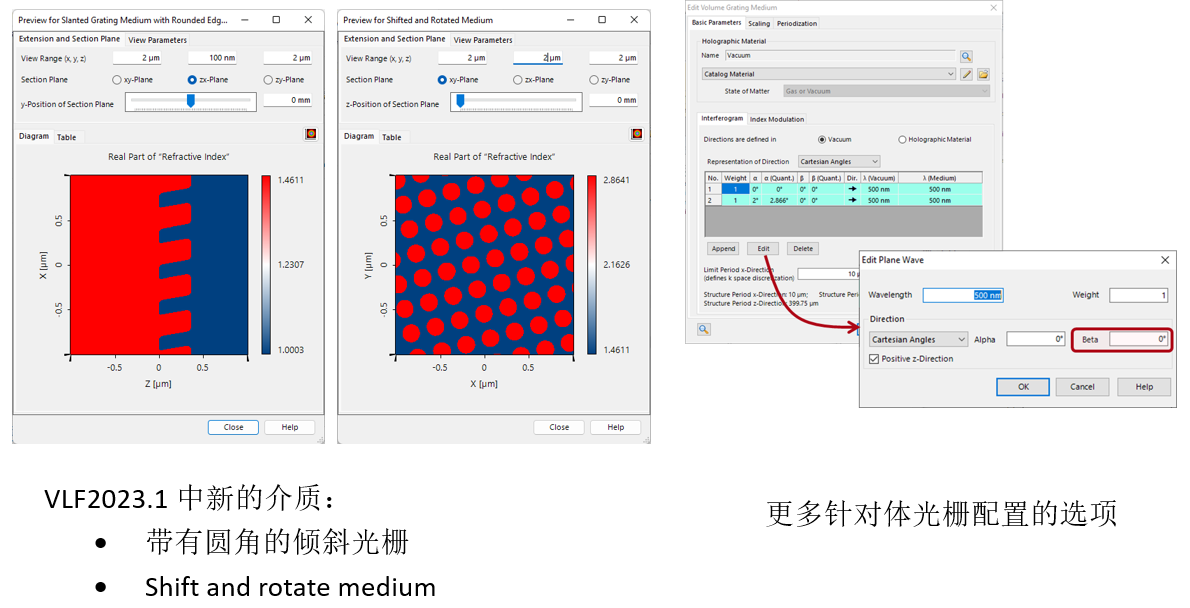
lcuqzX{�7� dW#?{n-�H< 组件 6y�hRc�vJ} 组件(Component)新的特征 LqoH�]�AcN ]h}O&�K�/� Pv�Vn}i��� • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
%D�u�Sc�o" 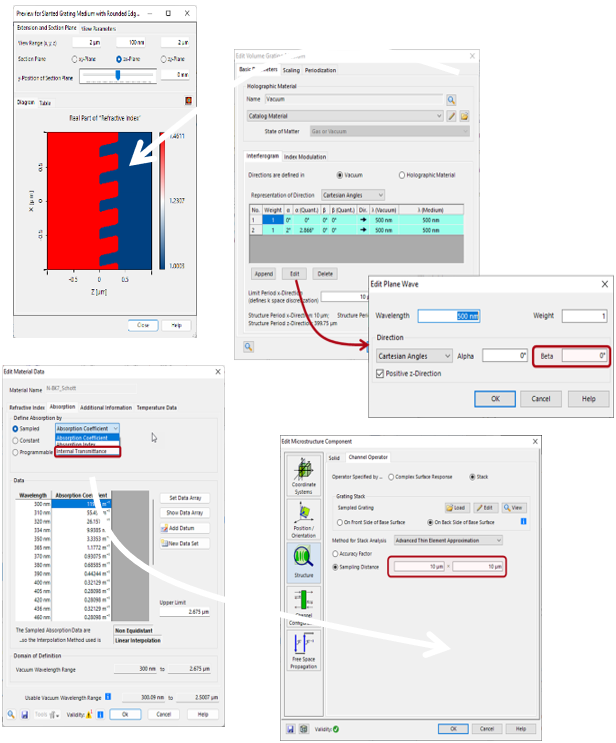 q�HC/)M�#L �0l~z�0pvT 组件(Component)新的特征 4�|xQQ��v�
q�HC/)M�#L �0l~z�0pvT 组件(Component)新的特征 4�|xQQ��v�
X���A�-�,�
 >^Y)@��J�
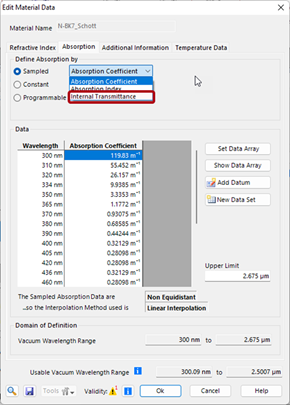
>^Y)@��J� 吸收特性可以用采样数据定义吸收率以及透过率。
%oiA�'hz;* Lr<?eWdCwJ 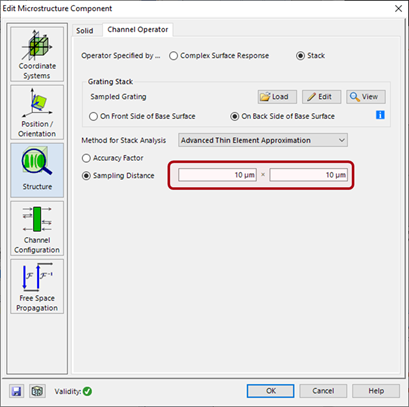 �JVh/<A��� c�}D>�.x|]
�JVh/<A��� c�}D>�.x|] 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
&|c] �U/_w `;z�;=A*�� 组件(Component)新的特征 �xqzB��=�0
9~yp�=JOV@
 y+�P$}�Nru yI8
/�m�| 组件(Component)新的特征 Rmh �u"N/q
y+�P$}�Nru yI8
/�m�| 组件(Component)新的特征 Rmh �u"N/q
`��b�cCj~j
 7:X@�lmBz= �4nGr?�%�> 组件(Component)新的特征 }�,�vVc�/
7:X@�lmBz= �4nGr?�%�> 组件(Component)新的特征 }�,�vVc�/
�
b�~O��c:
 y\}�<��N6 �]hlYm��T� G-W(giF;NO
y\}�<��N6 �]hlYm��T� G-W(giF;NO 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
8AIAv�_�
g 处理日志 '��cvc\=�p .*+�e��?-� 扩充版的处理日志 ���x�<h-�F
`���sJ�v? �7�.7�Z|lJ • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
5�MS5 Q]/� 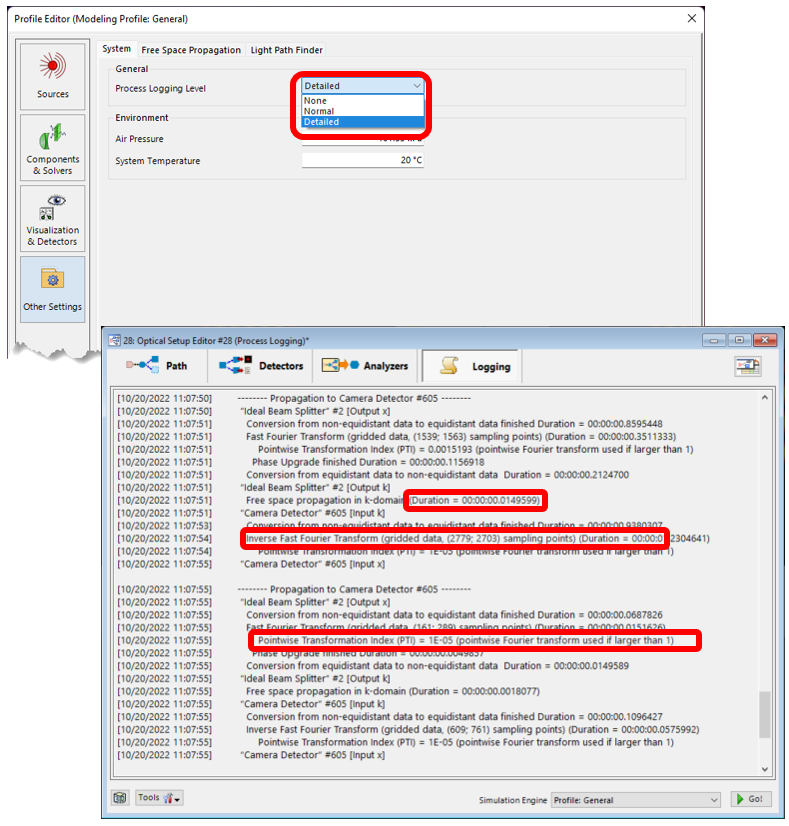 T`�`~YoIdz ej�{7�)��# 系统仿真分析 �PZ�Si�}j/ i�`" L?�3T
T`�`~YoIdz ej�{7�)��# 系统仿真分析 �PZ�Si�}j/ i�`" L?�3T • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
X1\ao[t<;c 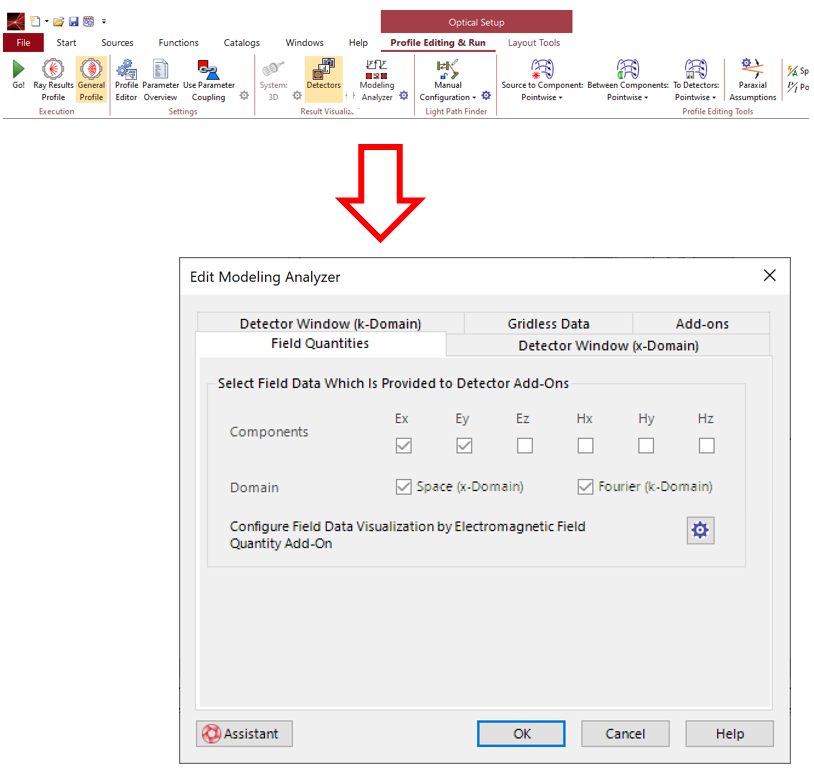 j8{,u6w)-� 6�D1tR�o� 专家模式(Expert Modus) �Q)l~?Fx�� IC@-`S#��F 专家模式中的数据阵列’Manipulations’ <!I�^�xo�[ ~{BR~\�D� h!~u^Z.7<�
j8{,u6w)-� 6�D1tR�o� 专家模式(Expert Modus) �Q)l~?Fx�� IC@-`S#��F 专家模式中的数据阵列’Manipulations’ <!I�^�xo�[ ~{BR~\�D� h!~u^Z.7<� • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
��{ZD'l5jU 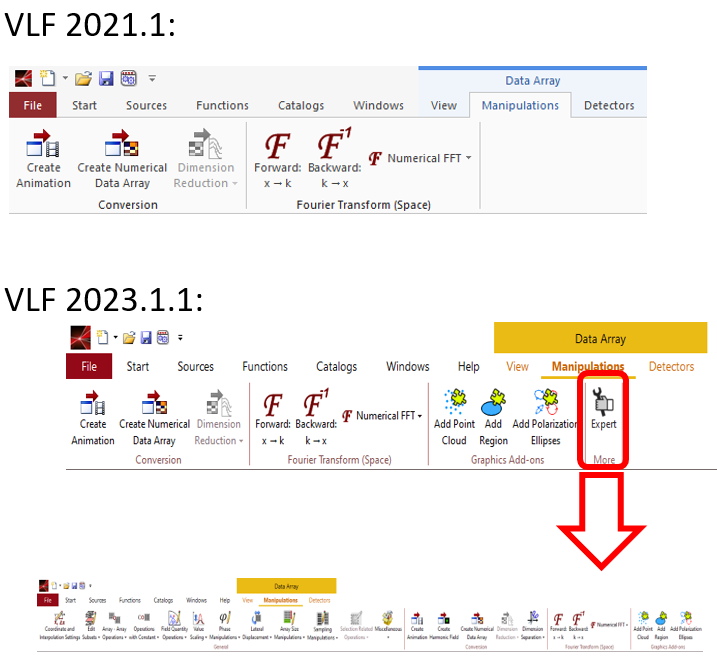 7ww���lZ;w #�;Z�+��X) 微小的改进帮助:新的计算器 r`!�S��*zK �4��@*��`V XyytO;X�M-
7ww���lZ;w #�;Z�+��X) 微小的改进帮助:新的计算器 r`!�S��*zK �4��@*��`V XyytO;X�M- • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
=@��"'aCU/ 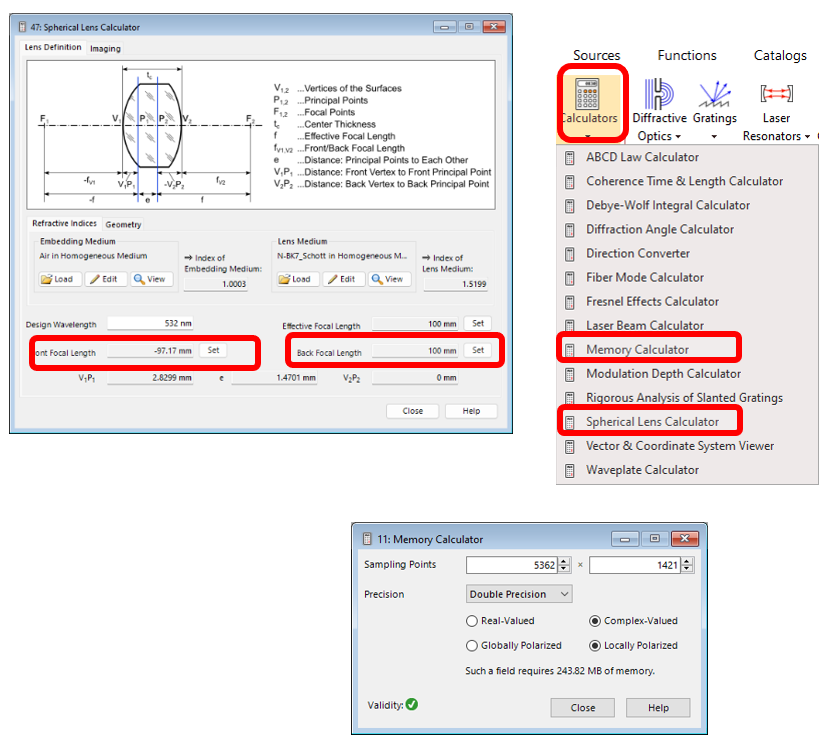 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



