2022 年 12 月,发布 VirtualLab Fusion 2023.1 DAW%?�(\�, VirtualLab Fusion 2023新版本更新内容(三) �f6�nl�t�Z 2023.1版本新特性一览 \�.���]
U n}��{�c�s� 基本信息 �l1�W�Vt}
{'!~j�!1'j
 v<�1;1m���
v<�1;1m���  *en{�pR�'�
*en{�pR�'� VirtualLab Fusion 2023.1新版本
主要更新方向 ��o1\8�>Ew
 s�8Oz^5p�(
s�8Oz^5p�(
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模
�y1�X.Mvc
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: ��k
W�,|�>
- 更快的速度 ~�\P.�gSiz
- 更容易使用 s3J$+1M�>
- 融合更多物理光学模型 {NR~>=~K-�
- 更高的透明度 odDt.gQX�U
- 多元的仿真控制选择 5�S� LF1u;
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 d�yd_dK/�
qb&*,zN��
��R�y �C7�
功能概述(以下为更新内容的详细解释和案例展示): �YSb��N=Rj
数据视图 K�4BMa]/U
-|mABHjx�* VLF 2023.1数据视图 x%�1�Rp��[ ]7;;uhn`�� 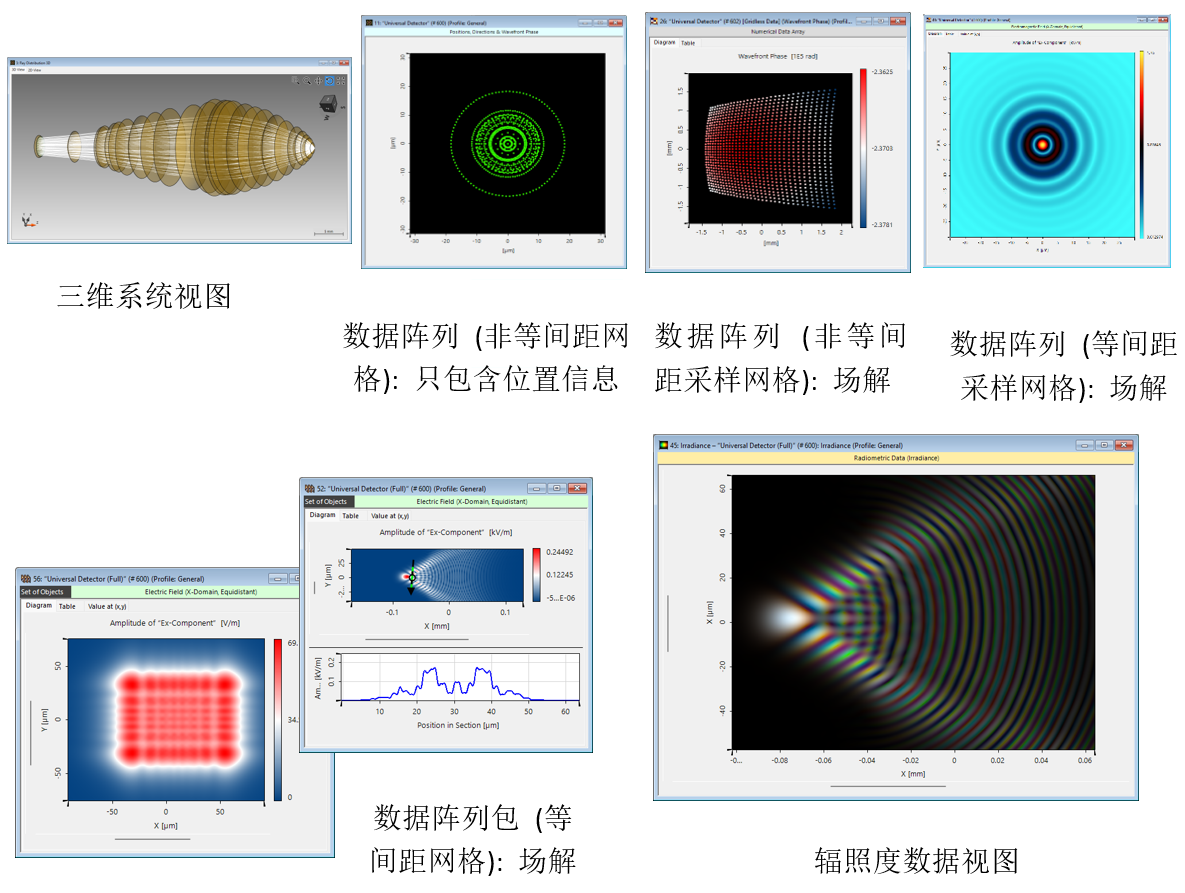 |UG)*t/�� #'�qW?8d}� VirtualLab Fusion 2023.1数据查看方式 ��RMXP�)�[
|UG)*t/�� #'�qW?8d}� VirtualLab Fusion 2023.1数据查看方式 ��RMXP�)�[
k:sh:G+=$d
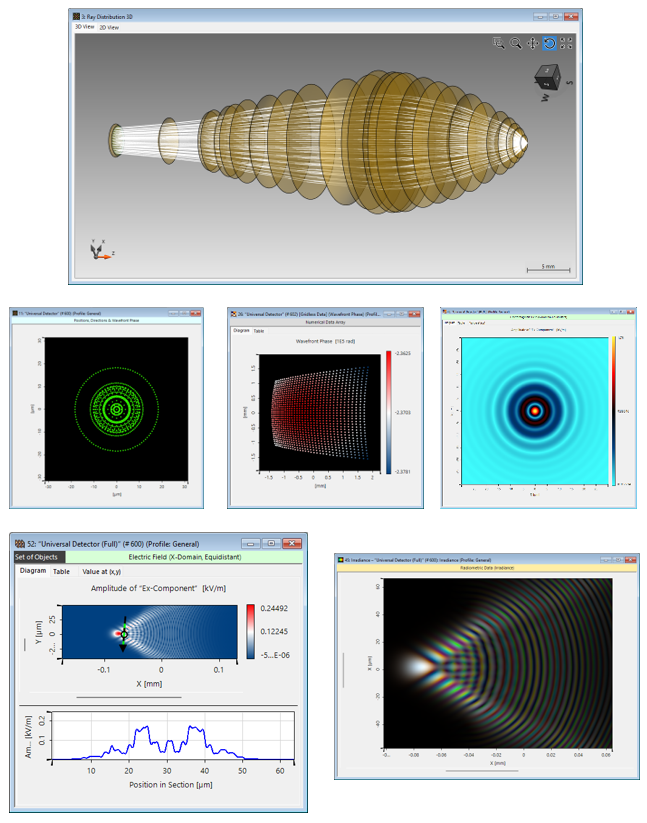 Y2Bu,�/9^� y@I"H�k<T 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 sC>8[Jat�d 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 1Q<a�+�
l 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ��*"@P2F�& 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 N�QmDm!-4� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 2;�/hF�w�m
Y2Bu,�/9^� y@I"H�k<T 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 sC>8[Jat�d 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 1Q<a�+�
l 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ��*"@P2F�& 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 N�QmDm!-4� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 2;�/hF�w�m
<d4^�gAfs*
eIJQ|p<�v
三维系统视图: 新的对话框以及设置选项 �9�V~�y�K?
�Wxjpe��4� 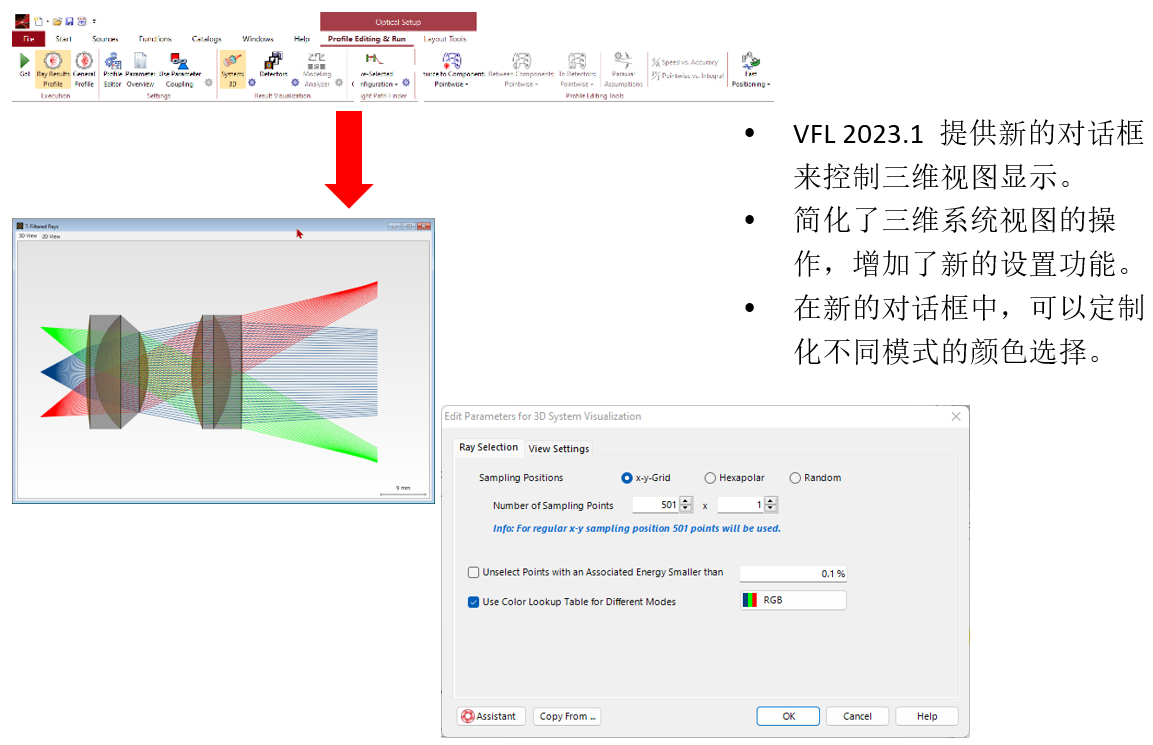 RW�5�T��}� �
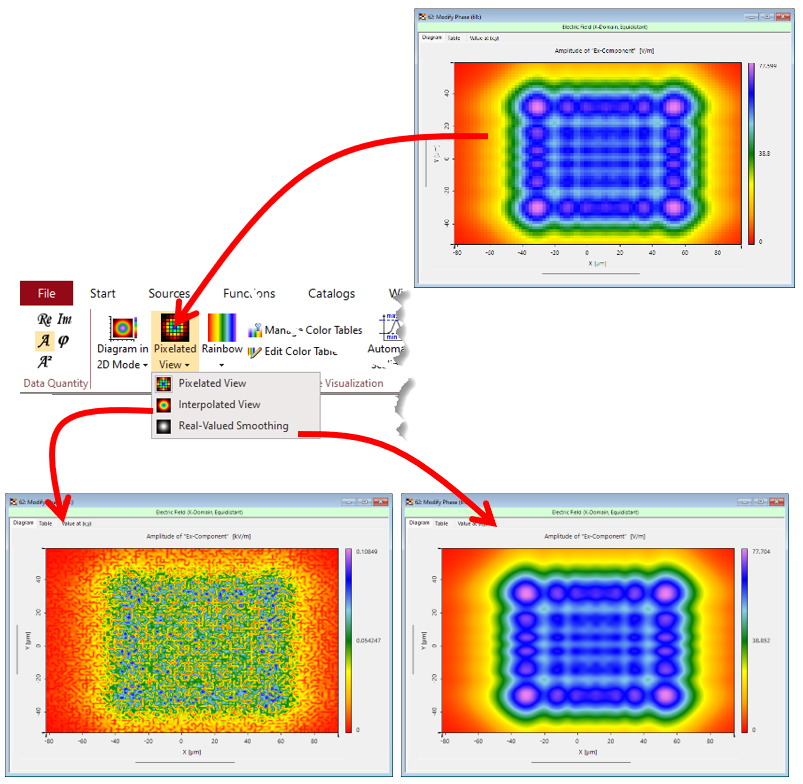
l}J�VRU{ 数据阵列视图: 像素数据(Pixelated Data)平滑 k�DsUKO
p
A�Opf�Byw • 探测器中的像素越少,探测器评估速度更快。 -��D���b(� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �~F WmT(�S • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 <�j��avZJ� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 3XI�xuQw�f
RW�5�T��}� �
l}J�VRU{ 数据阵列视图: 像素数据(Pixelated Data)平滑 k�DsUKO
p
A�Opf�Byw • 探测器中的像素越少,探测器评估速度更快。 -��D���b(� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �~F WmT(�S • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 <�j��avZJ� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 3XI�xuQw�f
,~��v1NK�*
 NJ.�kT� uk
NJ.�kT� uk
3hkA`YSYt
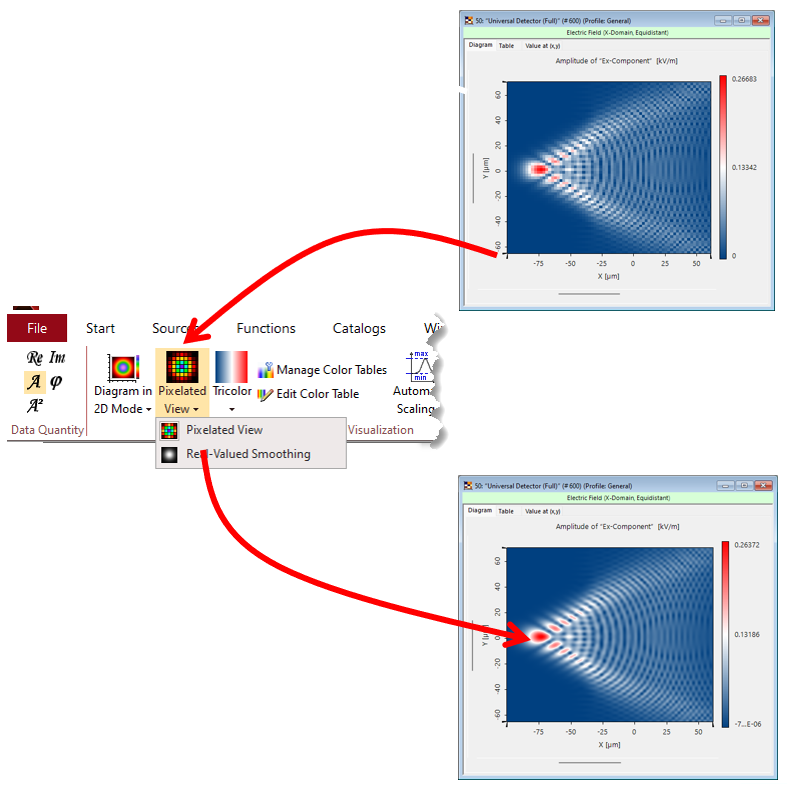
数据阵列视图: 像素数据(Pixelated Data)光滑化 wjkN%lPfvj
ct�f'/IZ5�
'2NeuK�-KD
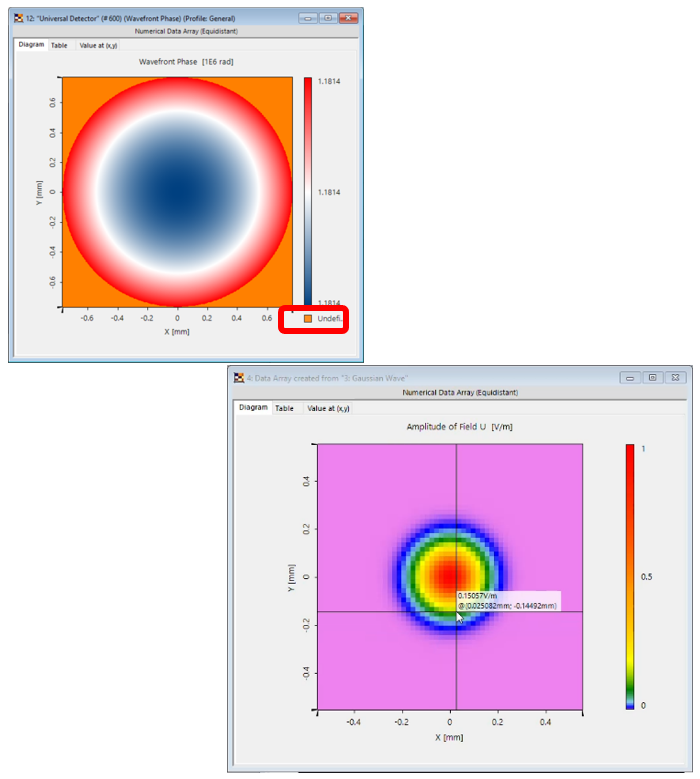
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �:H�~r
_>E
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 x�e���d$�z
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 K|�iNE�huc
<R2b�z1!h.
 pc��E.���
pc��E.���
�t;'__">:q
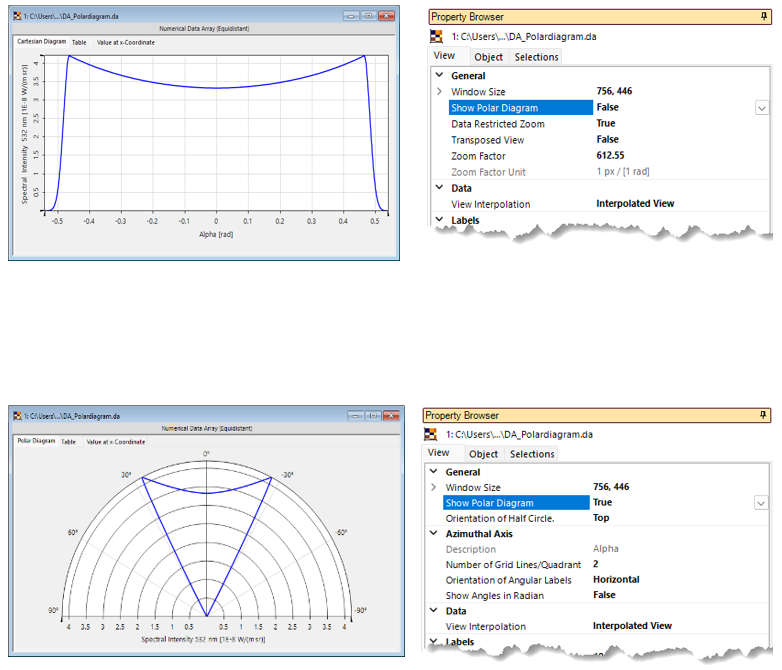
数据阵列视图: 极坐标图(Plolar Diagram) *f�E5Z;!�}
N3,�EF1�%� • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 �/SyiJCx�0 • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 7E�v~y�Y;N • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 ��Q,>AT�$| • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 t<4+�CC2H
BJqM=�<�nQ
 [.�2�>=3�T
[.�2�>=3�T
!$j'F?�2�>
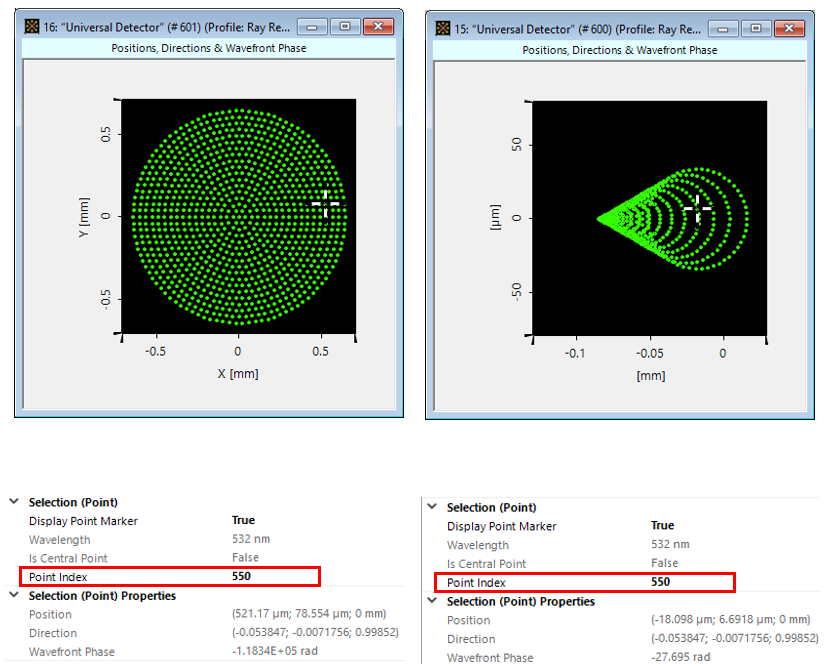
数据阵列视图:找寻以及点的标识 xMe[�/7)�4
B|�!�Re4`0
��Xs4`bbap
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 y�<)x`&pcD
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 wDn5|�F}i&
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 E5B:79BGO�
�Zvc�{o8^z
 �ZW�2U9���
�ZW�2U9���
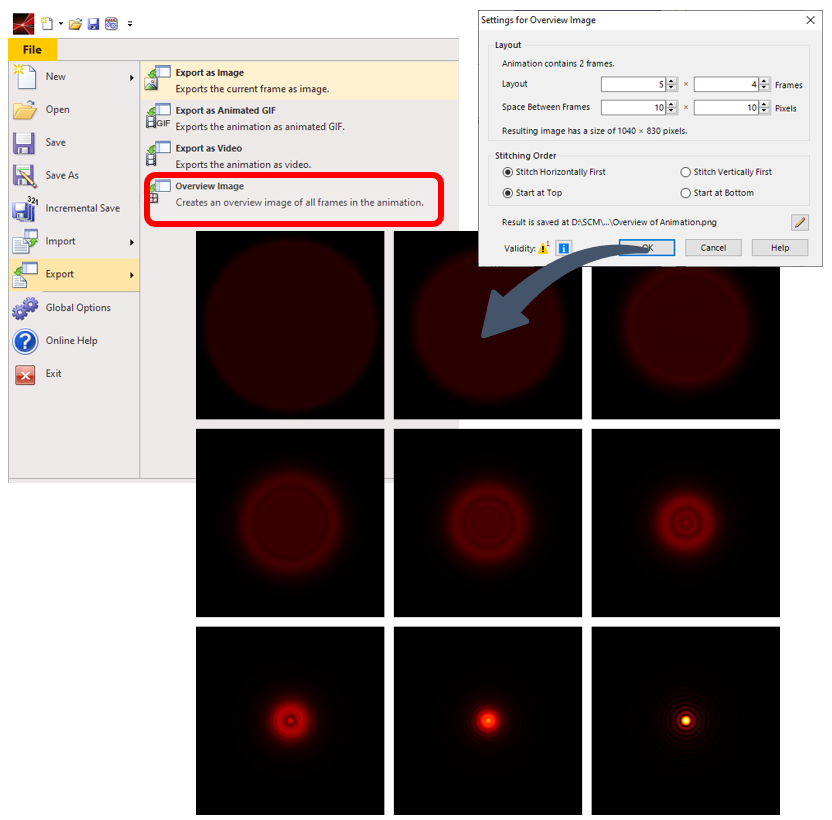
ss*�dM.��b 导出图像的概览 �T�7�[ItLZ ��VQ��+Xh� #�fQ��St�O
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 ��GZs�e8ng
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 ;:v:pg8qc�
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 ;%Qu�;�FtC F*QGzb�v)
 �By"
=]|Q�
�By"
=]|Q�
9T)-|�fja_
数据阵列视图: 更多的新功能 zT.qNtU%
RK|C*�TCnl
�[���-Dx)N
• VFL2023.1可以对未定义区域填充不同的颜色。 ]2?�t�$"G8
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 =�YR/|�9(
lV3\�5AE�W
 J@5�2<.�>6
J@5�2<.�>6
M5wj79'�l"
Graphics Add-ons提供更多数据视图选择 ��p9 %�7h. NT�:�p6(s^
T�wY]c<t�
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。
1I_(!F{Ho
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 H.*Xo�ktC]
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 �k5�(@n>p� -���r[l{ce 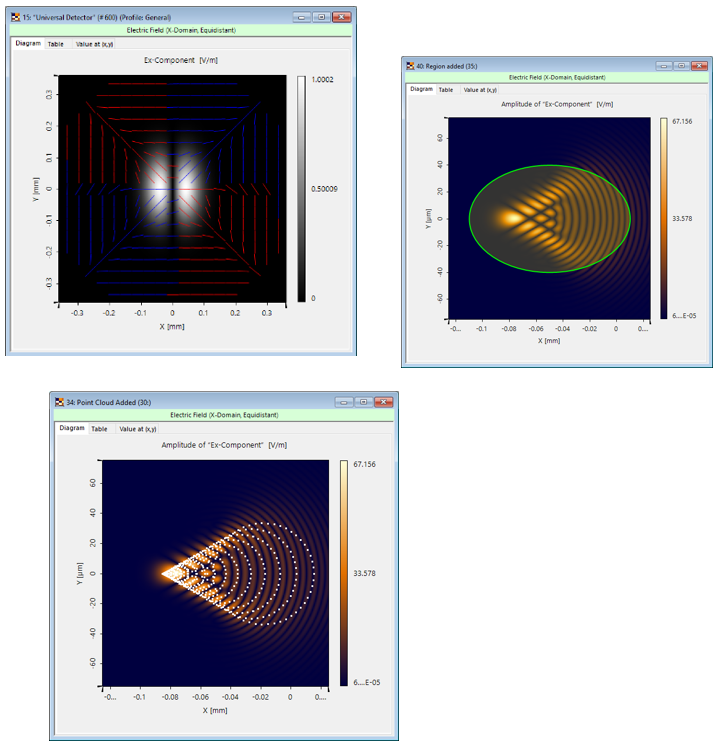 ]���"���^U �U�e!
&V�m PC/�Oo~Gx Graphics Add-ons提供更多视图选择 5EM(3eY�^q ,'[0tl}8K�
]���"���^U �U�e!
&V�m PC/�Oo~Gx Graphics Add-ons提供更多视图选择 5EM(3eY�^q ,'[0tl}8K� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
0X.pI1�jCO • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
Dr&2q��X!� • 图像组件提供了多样化的配置选项。
S�-��GcH� SZ�NM$X�|T 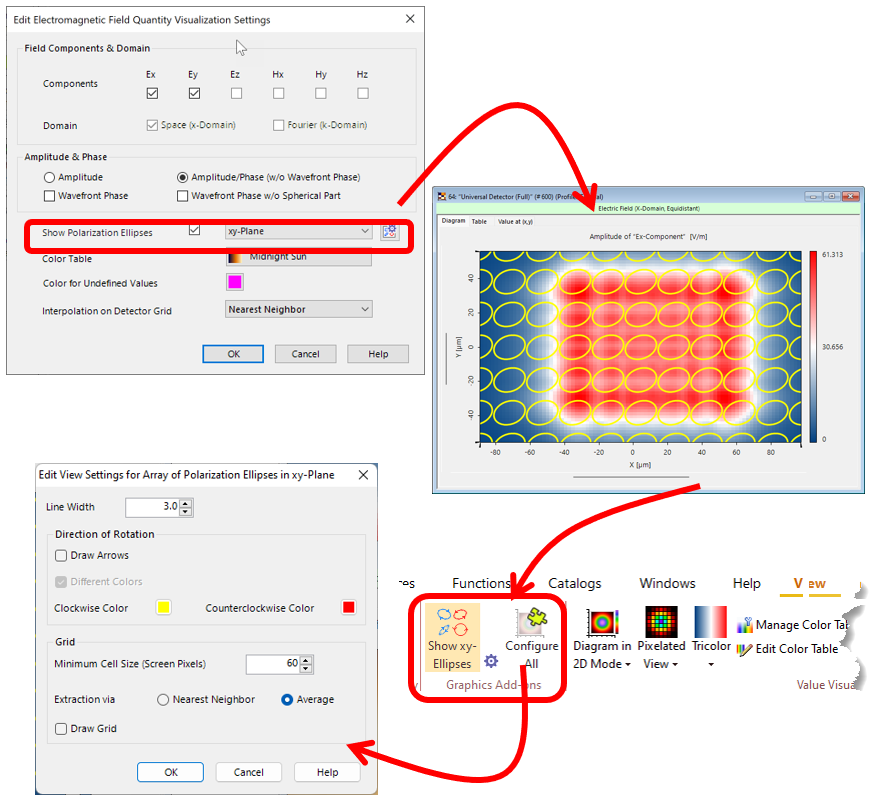 =
��oQ-I� .cjSg�K1�� Ng�2�qu!F7 Graphics Add-ons: 增加了 Point cloud 功能 >k5nU^|B�1 6|L<�?
X� voEg[Gg4%I
=
��oQ-I� .cjSg�K1�� Ng�2�qu!F7 Graphics Add-ons: 增加了 Point cloud 功能 >k5nU^|B�1 6|L<�?
X� voEg[Gg4%I • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
b|P[�\�9 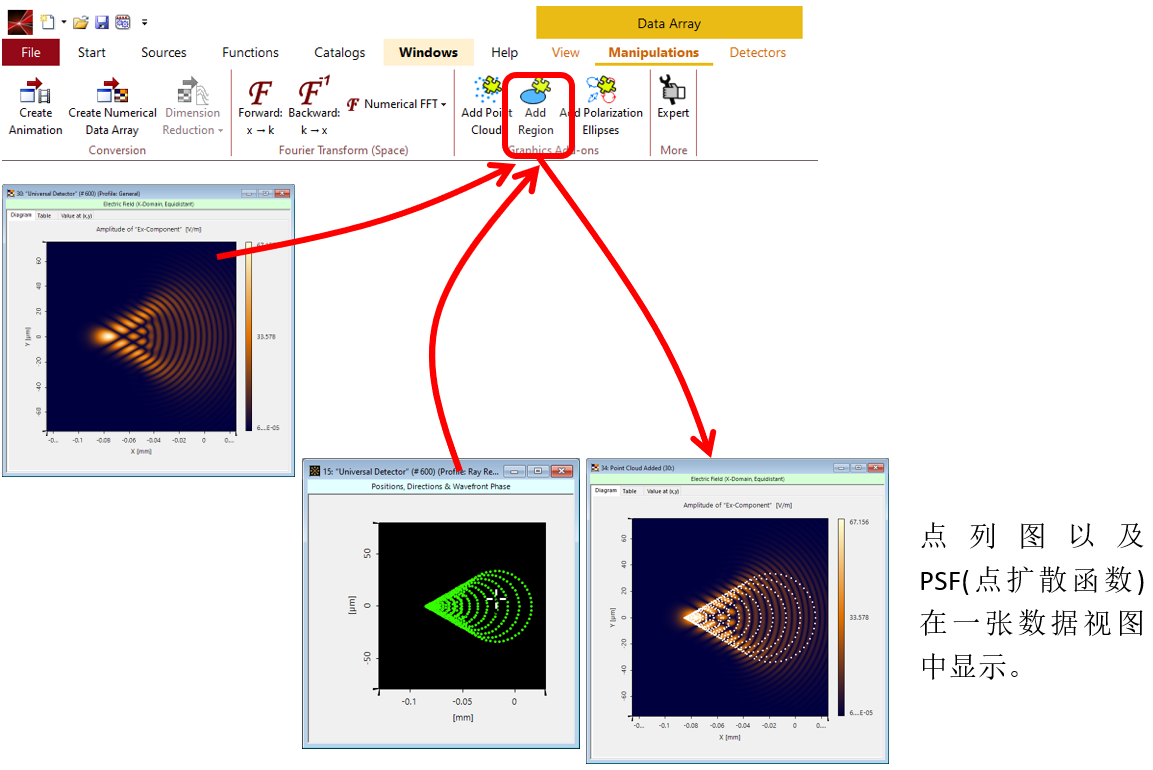 4u0=/�pfi[ � [td�)v, VirtualLab中的区域 (Regions) �W�L:CBE# �/0IvvD!7N E)7vuW�O�O
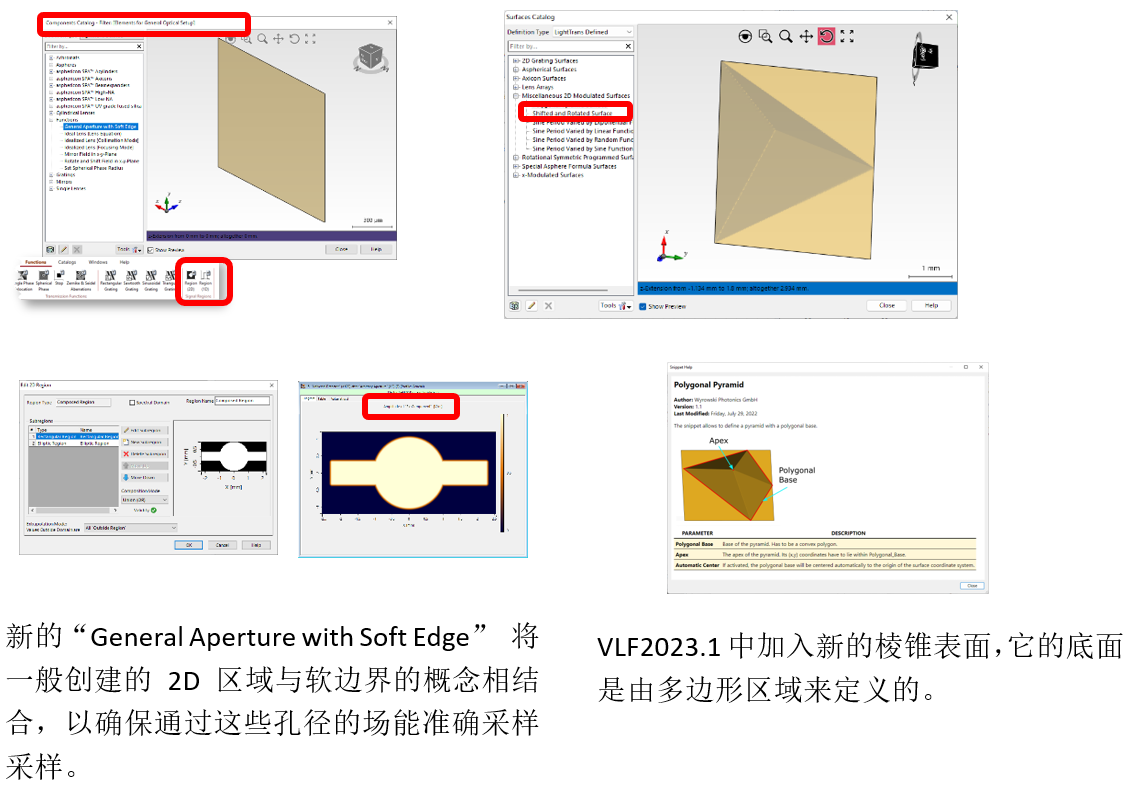
4u0=/�pfi[ � [td�)v, VirtualLab中的区域 (Regions) �W�L:CBE# �/0IvvD!7N E)7vuW�O�O • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
��9� "7(Jq 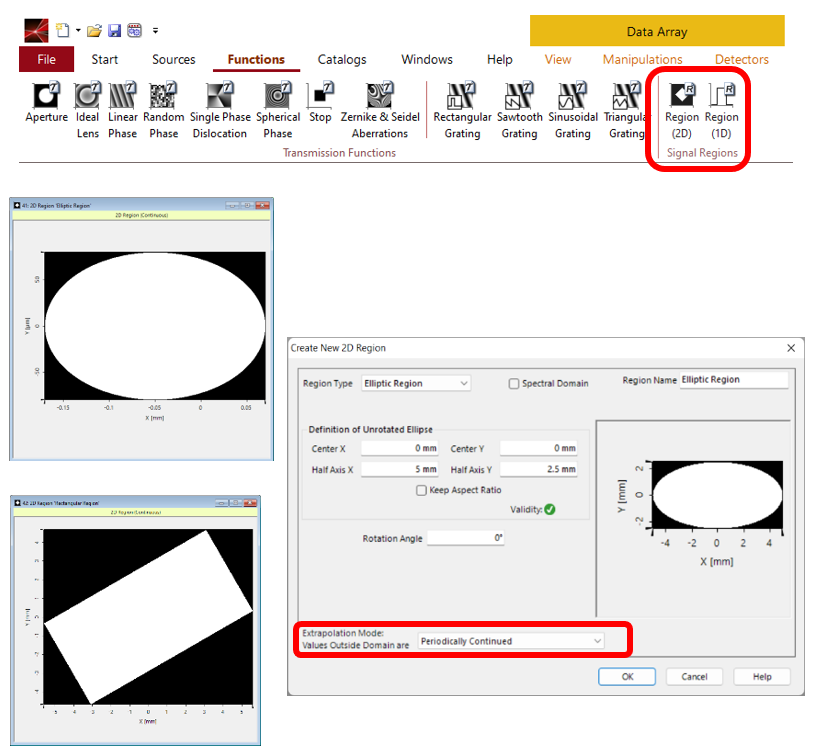 ��(]>=��y� B|zJrz�0q3 )%I2#Q"Nt- Graphics Add-ons: 添加区域(Add Region) -W<x|ph
U� !RN�(/ &%y ���FW�NWOU
��(]>=��y� B|zJrz�0q3 )%I2#Q"Nt- Graphics Add-ons: 添加区域(Add Region) -W<x|ph
U� !RN�(/ &%y ���FW�NWOU • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
9K�kxUEk�W 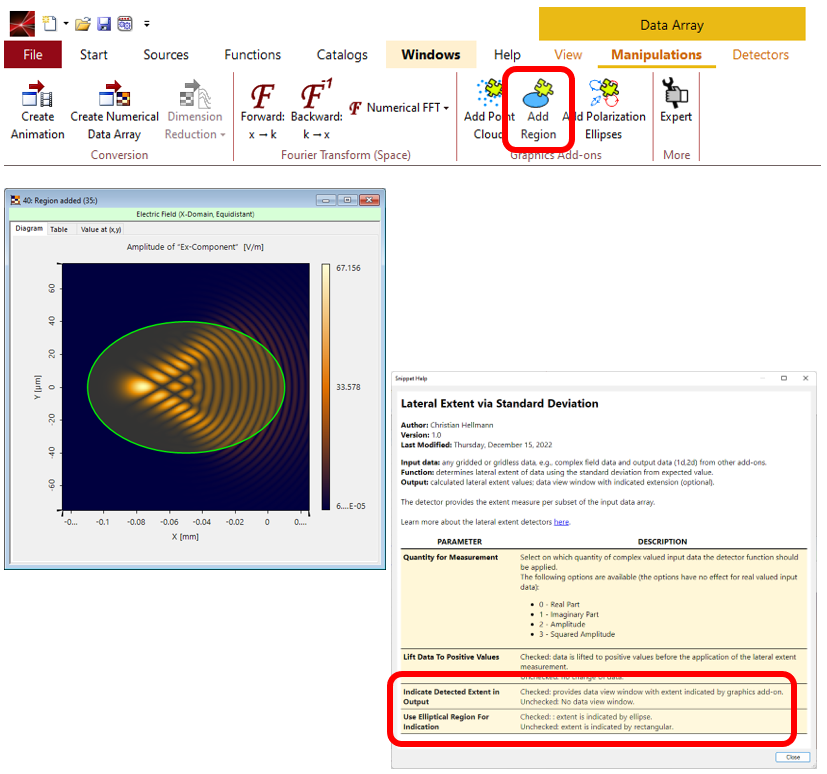 :X�q��qhG n�ep0<&�"�
:X�q��qhG n�ep0<&�"� 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
(R5�n �ND J'j�w��R�n Graphics Add-ons: 添加区域(Add Region) O�`�<id+rx �d�I};���l 0Z�$=2c?xT • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
%ukFn
&-2@ >)\��x��\e 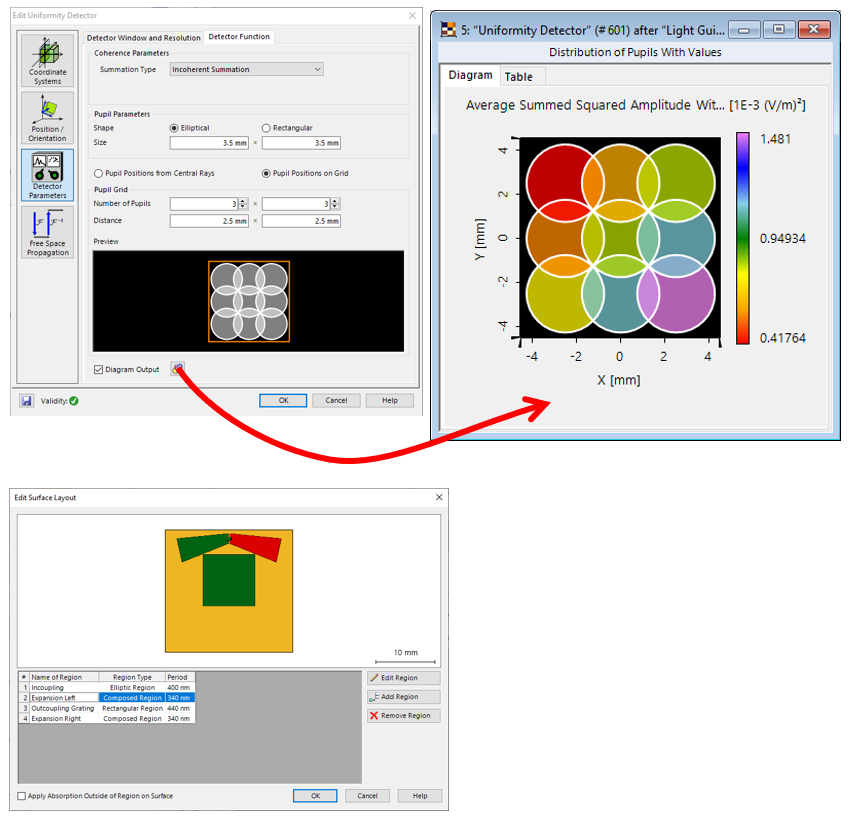 �ya�.�!zGH
�ya�.�!zGH • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 )RG@D\t�,� lV�<2�+Is� e)�"]��H*� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
]?tC��+UKb • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
ra2sYH1w�r 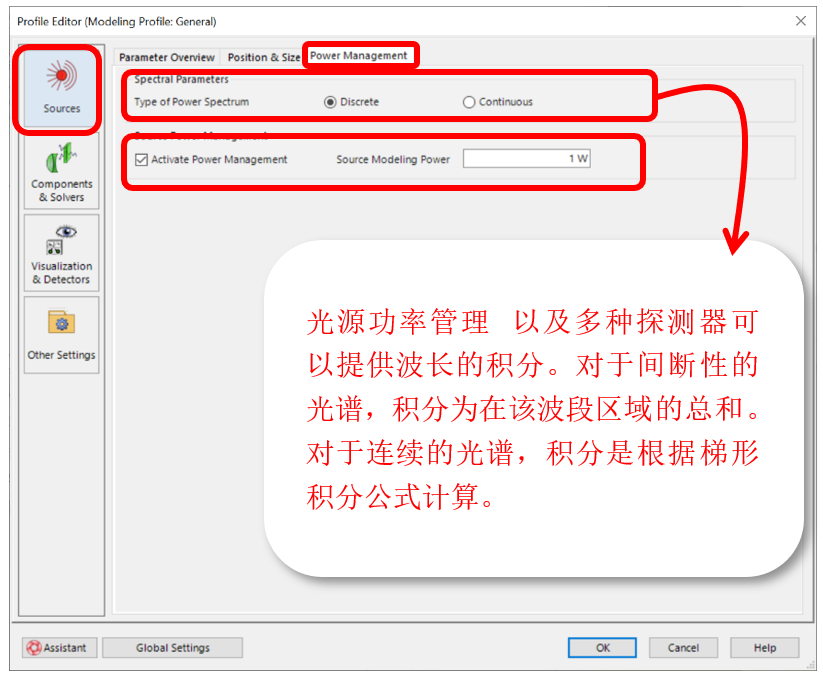 ,rc?,J1�l�
,rc?,J1�l� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
bk^W]<:z�` 1. 针对给定光源参数,进行光源功率的评估。
�B �>2"�O 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
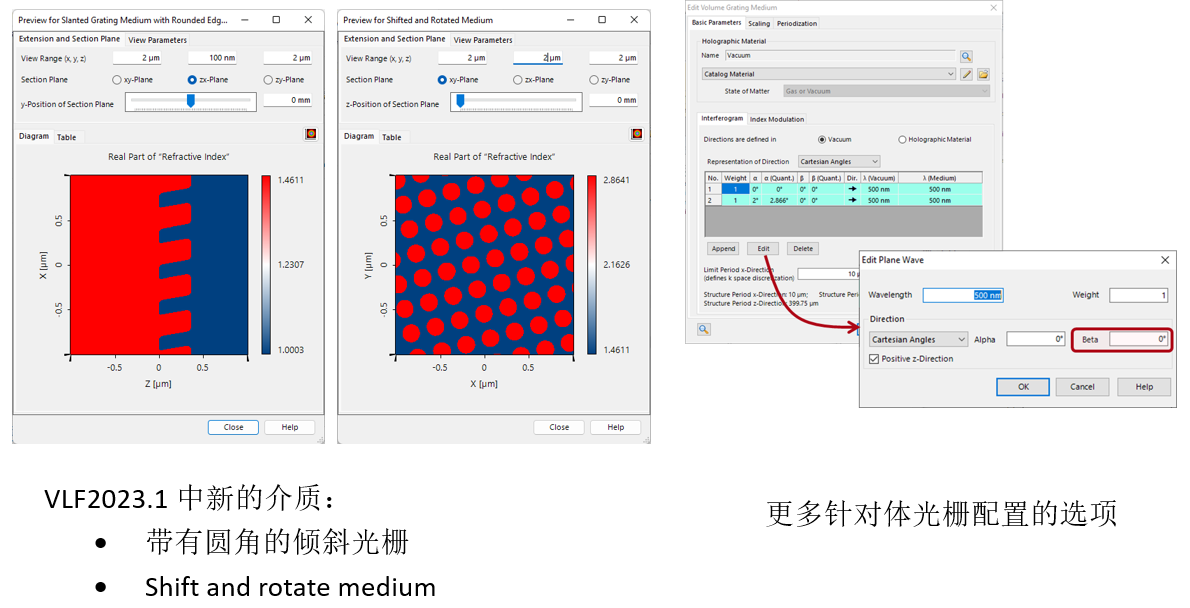
dNK� Q�&TC ;;;aM:6��\ 组件 Q$u&/g3NvL 组件(Component)新的特征 ?tx%K��U\3 _�kGJqy�YV nE;^xMOK�! • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
J8IdQ:4^l� 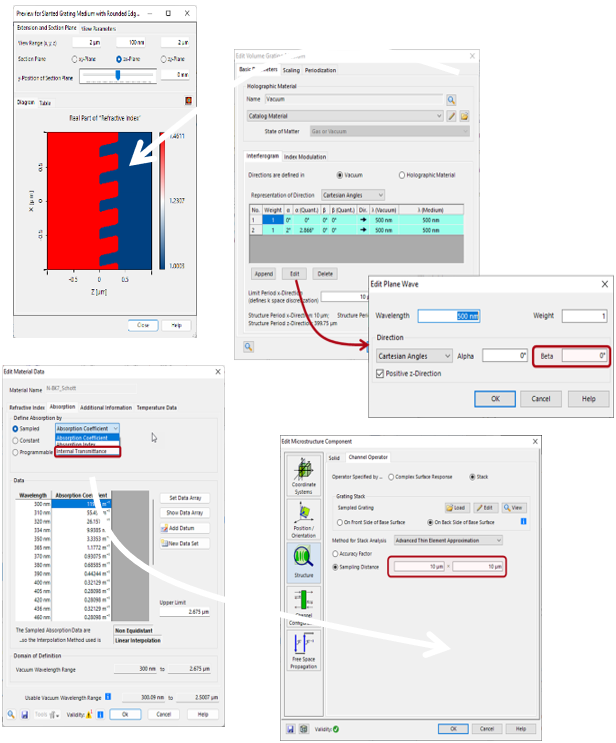 �trl�Z�^K %c:v�70*h= 组件(Component)新的特征 {E�U?�{��#
�trl�Z�^K %c:v�70*h= 组件(Component)新的特征 {E�U?�{��#
PW�7{,1te,
 b/;!�y�O�F
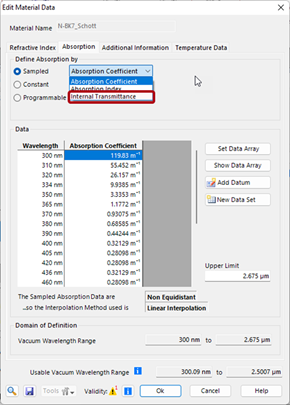
b/;!�y�O�F 吸收特性可以用采样数据定义吸收率以及透过率。
ML e�o3��� <j\os��w1R 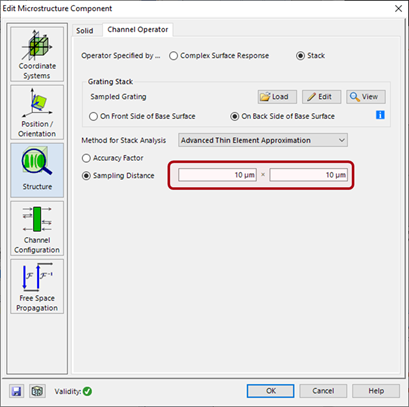 cC@�.���&� ]�:H((r��k
cC@�.���&� ]�:H((r��k 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
Zfw�hg�4G~ �B"KD�r_,, 组件(Component)新的特征 &ed&�2�t`Y
�rF��n%�e
 6WI�-ZEVp& vl}fC@%WRI 组件(Component)新的特征 �/1�D]\k()
6WI�-ZEVp& vl}fC@%WRI 组件(Component)新的特征 �/1�D]\k()
�Yvm�o%.oU
 �CcDm�Z��� �s�VzU�>�� 组件(Component)新的特征 ��$�+'bRUo
�CcDm�Z��� �s�VzU�>�� 组件(Component)新的特征 ��$�+'bRUo
,^Ug�[pGG-
 M( �eu��wy *aem5�E`c� J�eb�"t1.$
M( �eu��wy *aem5�E`c� J�eb�"t1.$ 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
�?so=k&I-M 处理日志 C6�<*�'5�T v�H[G#A~�4 扩充版的处理日志 U�w`�YlUT\ c
qW�X*&2_ ,?k0~fu�G6 • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�Nj�5V" �c 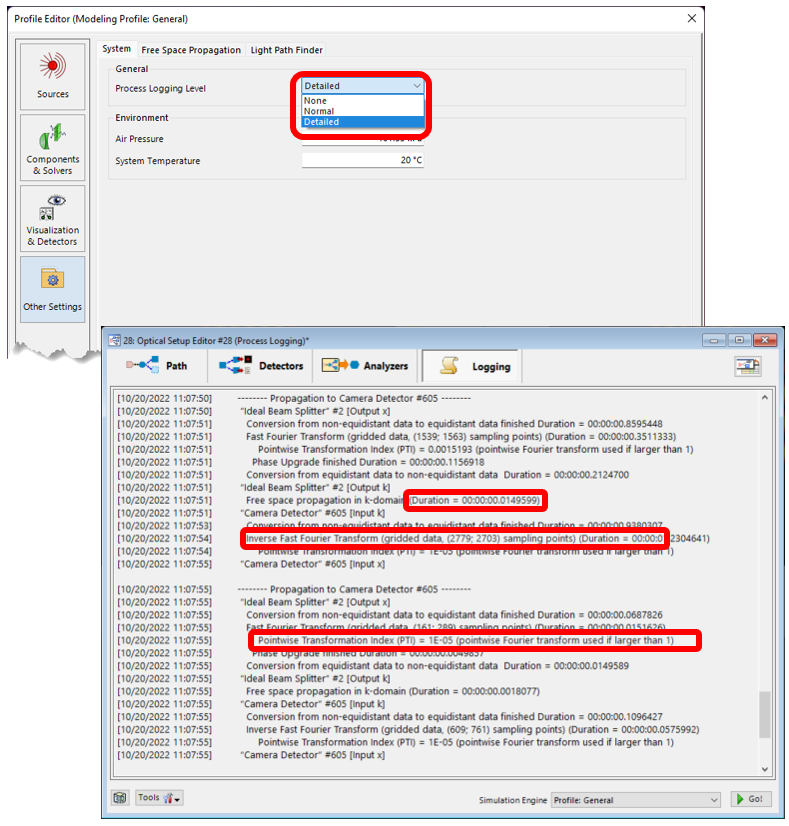 ���%1J�N%� 1UHlA8w7�Q 系统仿真分析 $~^Y4� }
m �T�K! D�=M
���%1J�N%� 1UHlA8w7�Q 系统仿真分析 $~^Y4� }
m �T�K! D�=M • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
n7EG%q6m+ 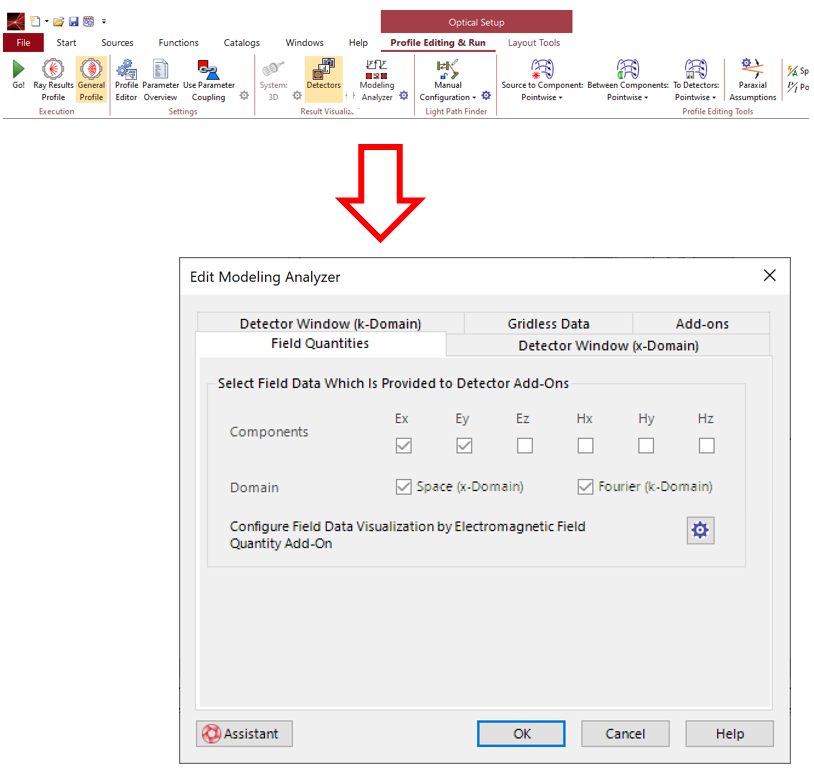 �^k#.;Q#4� �JyiP3whW 专家模式(Expert Modus) LA +�BH_t& pY��xdE|2j 专家模式中的数据阵列’Manipulations’ :NCY6?
[Dz h=a-~= 8�� m��K�T�a�.
�^k#.;Q#4� �JyiP3whW 专家模式(Expert Modus) LA +�BH_t& pY��xdE|2j 专家模式中的数据阵列’Manipulations’ :NCY6?
[Dz h=a-~= 8�� m��K�T�a�. • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
!Py�SY��Y� 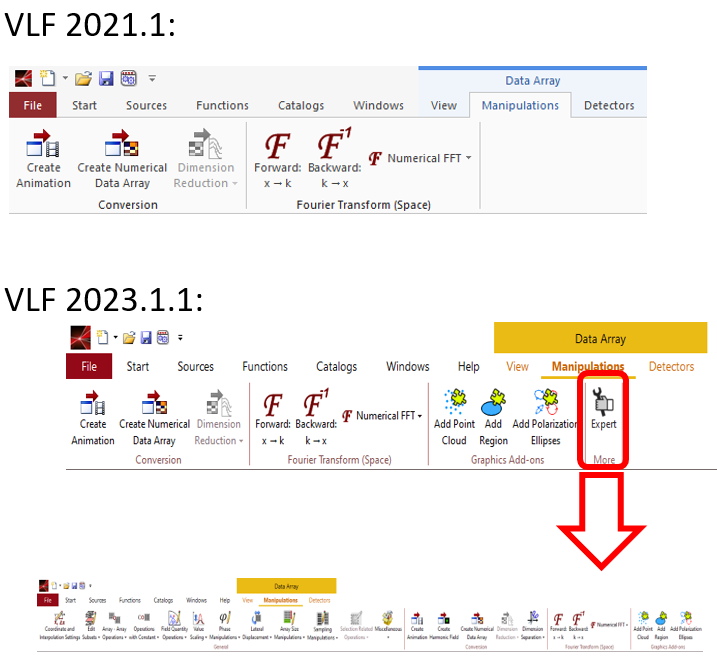 \jR('5�DcB k'6Poz�+< 微小的改进帮助:新的计算器 � ��1K&_�t BdMme�M2h 'gD,��H��X
\jR('5�DcB k'6Poz�+< 微小的改进帮助:新的计算器 � ��1K&_�t BdMme�M2h 'gD,��H��X • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�MJyz0.9�c 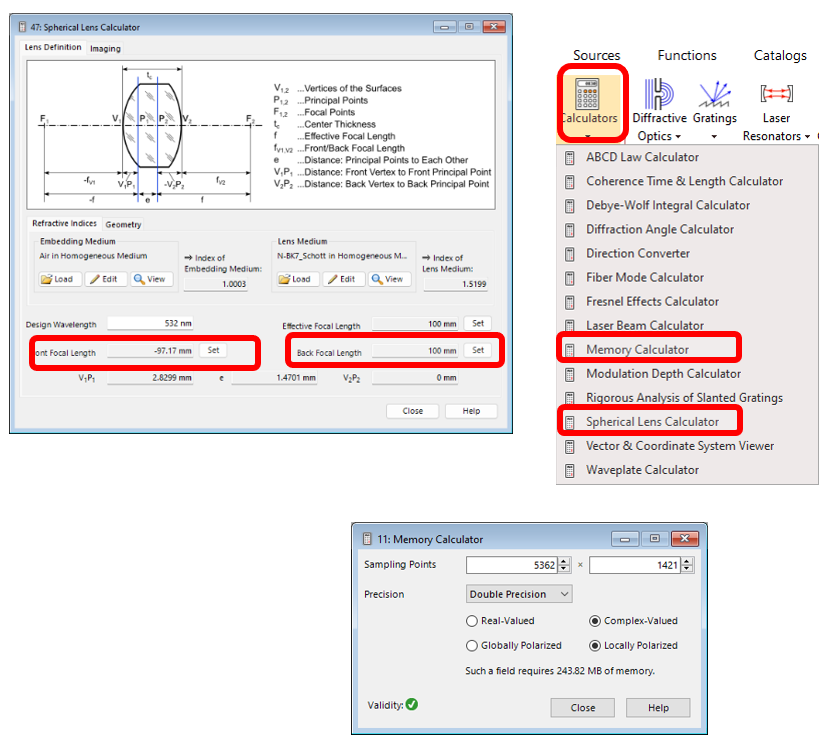 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



