2022 年 12 月,发布 VirtualLab Fusion 2023.1 zLX�t�j�-� VirtualLab Fusion 2023新版本更新内容(三) ]�P<��&CEk 2023.1版本新特性一览 R!��pV��`N nI_Zk.R�� 基本信息 'T�|.<u�@~
vlj|[j�oXw
 "h�lIGJ?_=
"h�lIGJ?_=  =�{L:q8�v)
=�{L:q8�v) VirtualLab Fusion 2023.1新版本
主要更新方向 W+K=M*^D;c
 ��s:]�rL&|
��s:]�rL&|
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 (vj2X�iO^+
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: �6�gR�=e+
- 更快的速度 +Qc���^A��
- 更容易使用 ���\v-> �'
- 融合更多物理光学模型 Ha+�F�H8rZ
- 更高的透明度 �Ug��dm"��
- 多元的仿真控制选择 �b0t];Gc%b
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 m/��6o�Q��
���B�-&J]H
q75�F^�AvH
功能概述(以下为更新内容的详细解释和案例展示): *10e)rzM��
数据视图 [�Z5x_.k"I
�]7��u8m[@ VLF 2023.1数据视图 g��:o\�r
( o$-8V:�)6d 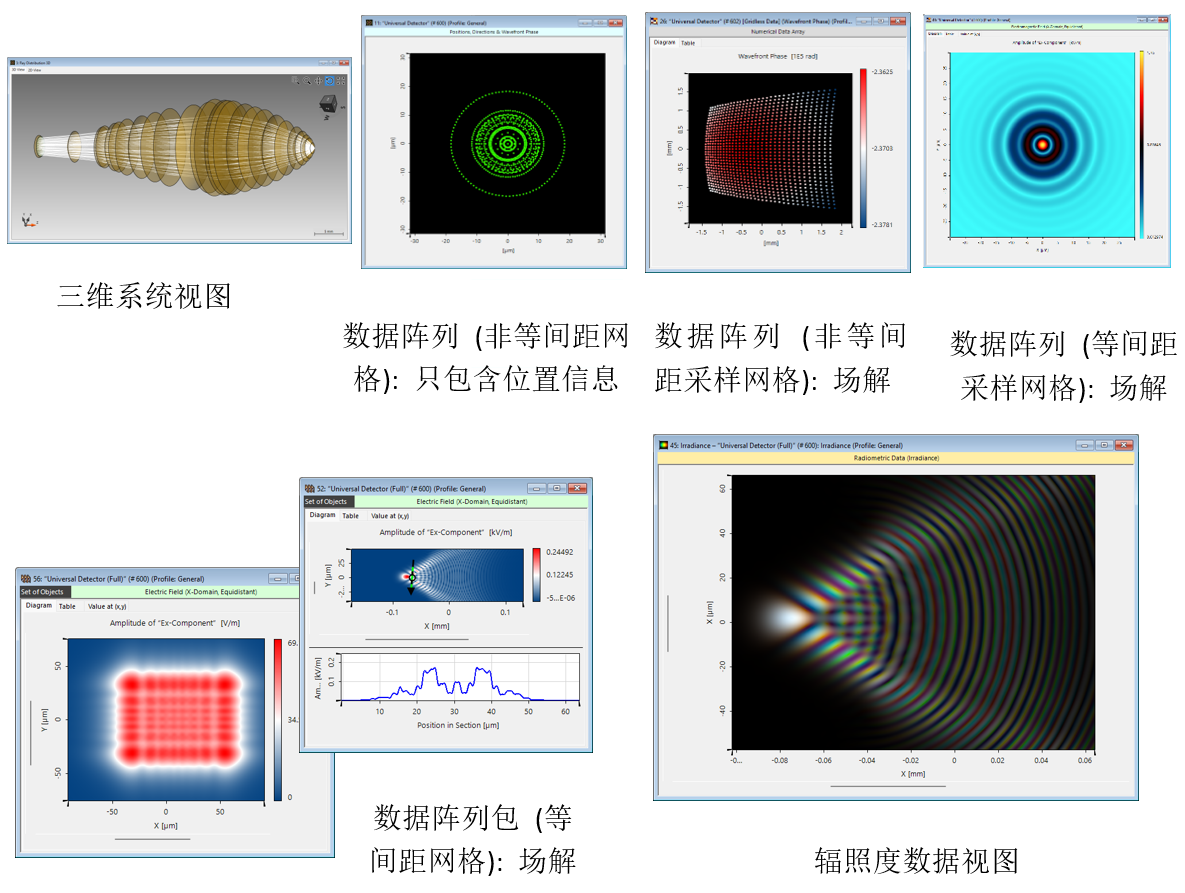 jZ{��S{"j ReK@~#�hLY VirtualLab Fusion 2023.1数据查看方式 s~]nsqLt9p
jZ{��S{"j ReK@~#�hLY VirtualLab Fusion 2023.1数据查看方式 s~]nsqLt9p
^c(PZ,/#JB
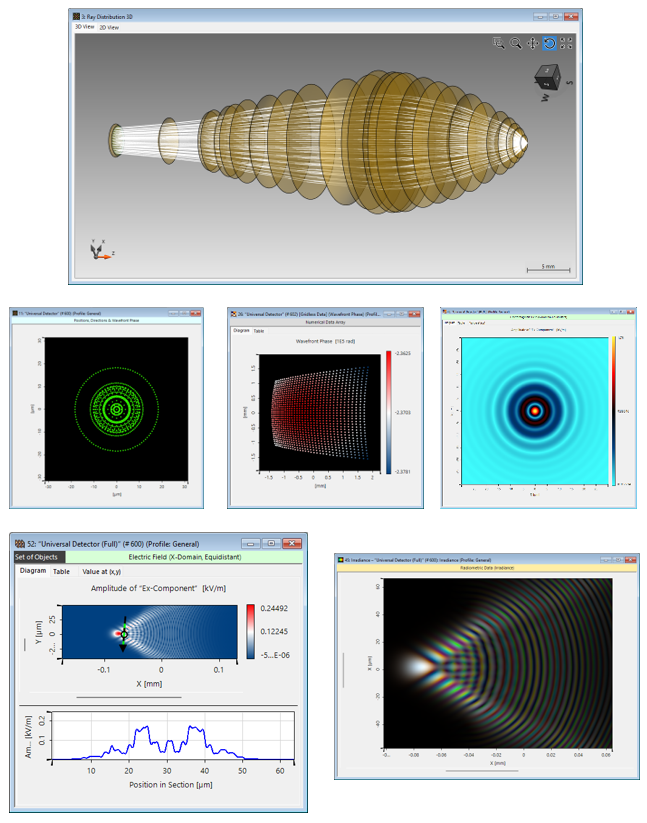 R<U?)8g,h~ zA"D0�f��r 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 M3t_!�HP}! 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 To�MX7x�z6 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 &%�����*S� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 Zi[)(ag�AT 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 W#�l�vH=y
R<U?)8g,h~ zA"D0�f��r 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 M3t_!�HP}! 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 To�MX7x�z6 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 &%�����*S� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 Zi[)(ag�AT 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 W#�l�vH=y
F�Q�-(�#[
e:,.-Kvzp`
三维系统视图: 新的对话框以及设置选项 SY$%!!
@R�
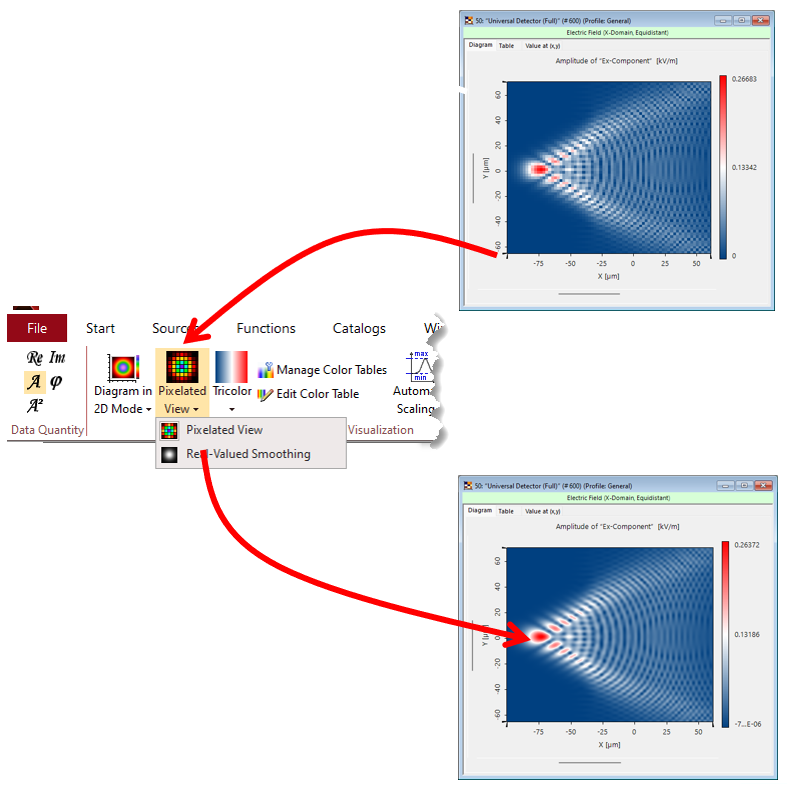
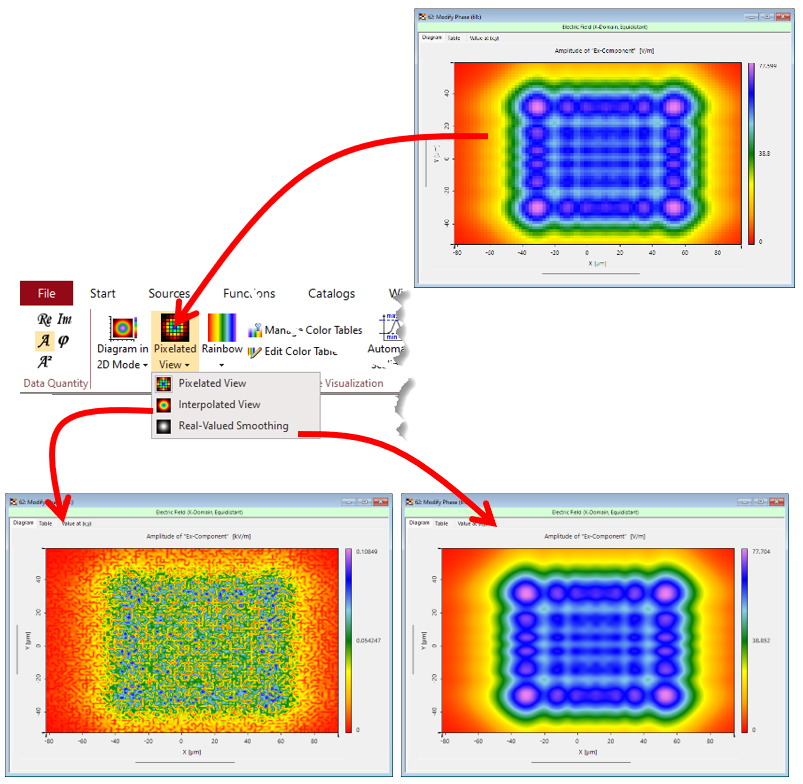
�v;RQV�H;, 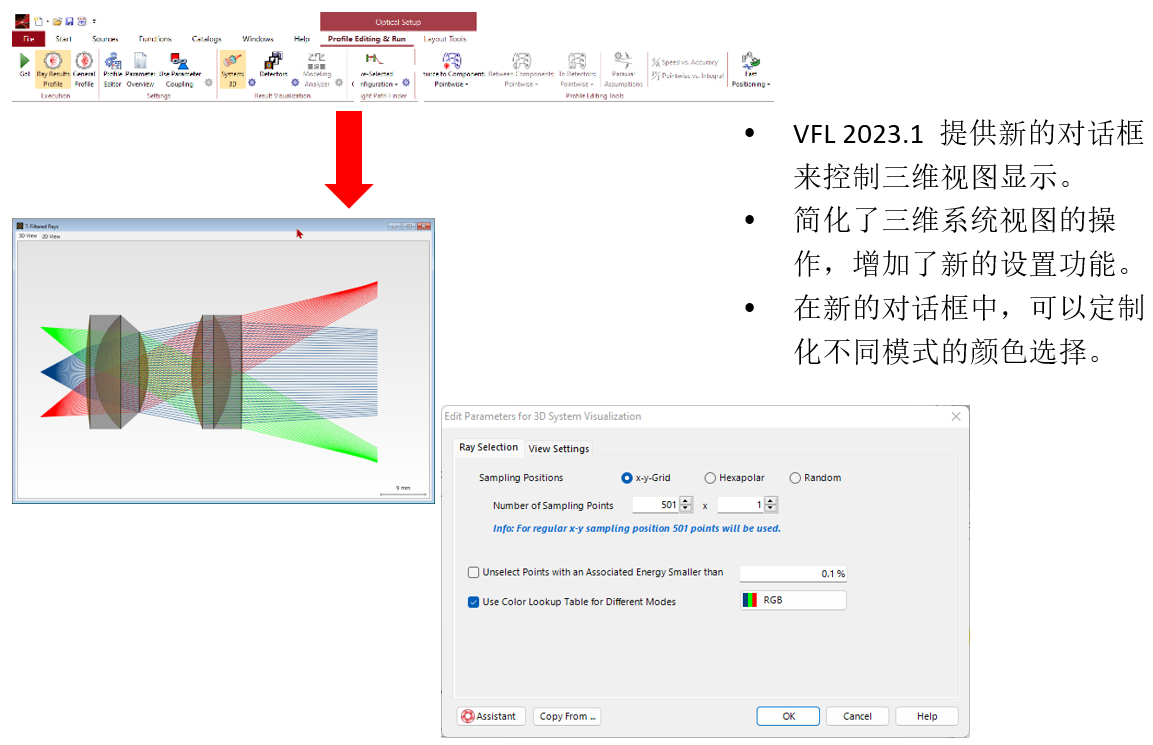 h3)�KT+�7. n]�$vC��P� 数据阵列视图: 像素数据(Pixelated Data)平滑 -�y\�N�9� p��J�v���? • 探测器中的像素越少,探测器评估速度更快。 �~�F(+uJbO • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 n7��MS�{�` • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 PCL�SY8N�� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �Ov<3?)ok
h3)�KT+�7. n]�$vC��P� 数据阵列视图: 像素数据(Pixelated Data)平滑 -�y\�N�9� p��J�v���? • 探测器中的像素越少,探测器评估速度更快。 �~�F(+uJbO • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 n7��MS�{�` • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 PCL�SY8N�� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �Ov<3?)ok
7G�Iv�3D�c
 `?�D�_�=Gw
`?�D�_�=Gw
:>���;ps�R
数据阵列视图: 像素数据(Pixelated Data)光滑化 t~�a$|(
�9
bNaUzM!,�H
Hwc{%.%�ae
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ��qA~�D*�=
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 f C�^l9CRY
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 �G4{q�Wa�/
v]BQIE?R /
 @NH���Ruk+
@NH���Ruk+
aEk*��-v#{
数据阵列视图: 极坐标图(Plolar Diagram) b�� �#^aM�
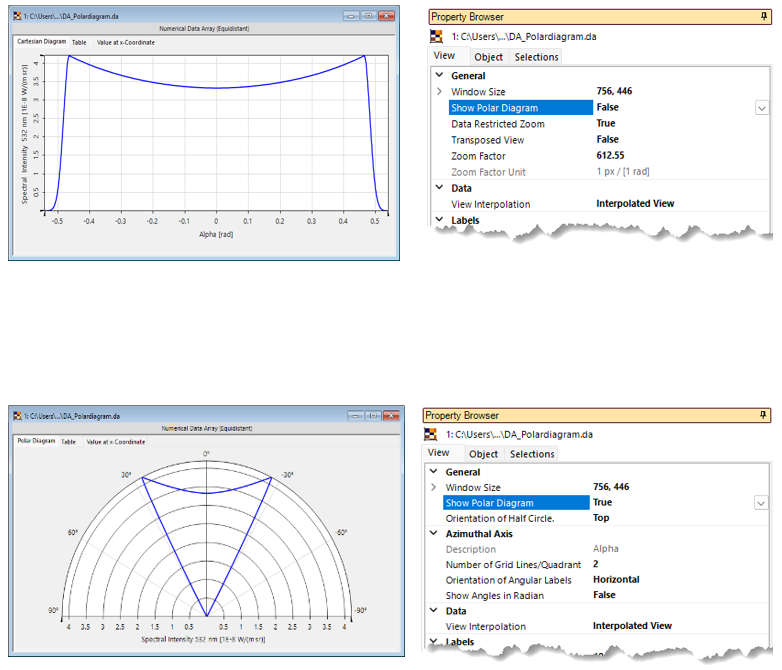
�__V]HcP;� • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 >C-_Zv<!T\ • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 Gzir>'d2'V • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 n% `��r�� • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 Ql�S5B.h,�
nfJ8R��t
�
 #Pr��V)en
#Pr��V)en
X<m�%EXv�V
数据阵列视图:找寻以及点的标识 q�E`�=^�
`��;�_t�t_
@�*��uX[�)
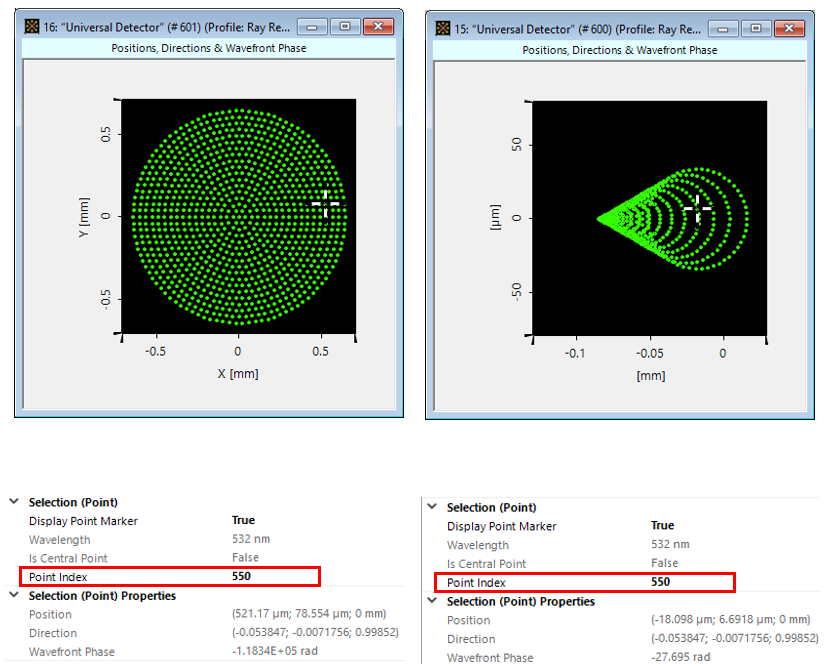
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 cyhD%sB[D9
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 pNqf�2CnnT
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 � `JE>GZ�Y
@1@q6@�9Tu
 Y�Mi(Cyja&
Y�Mi(Cyja&
Uo����@NK 导出图像的概览 Ky�y�G8;G% �IP'i�g��X y�\_S1�1{v
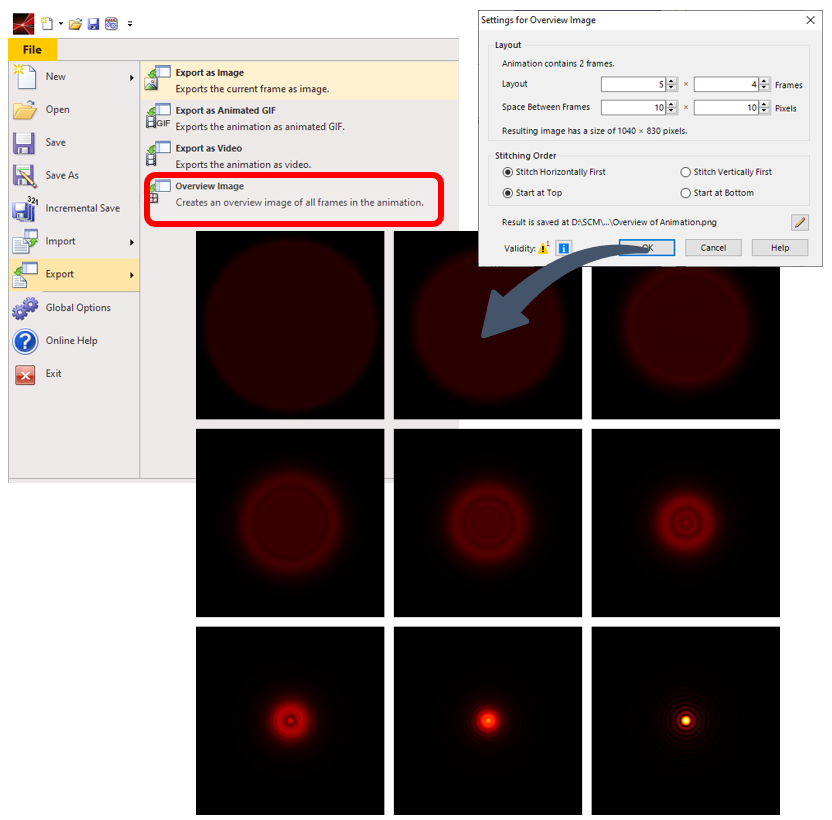
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �ii��;WmE&
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 3opL�L�f_g
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 g�&Z7h4!\ .�?�p}���:
 ZW�?�7�g+P
ZW�?�7�g+P
~^^ey17 ��
数据阵列视图: 更多的新功能 �t>wxK
,��
nP�3GI:mjL
2���Z�O'X9
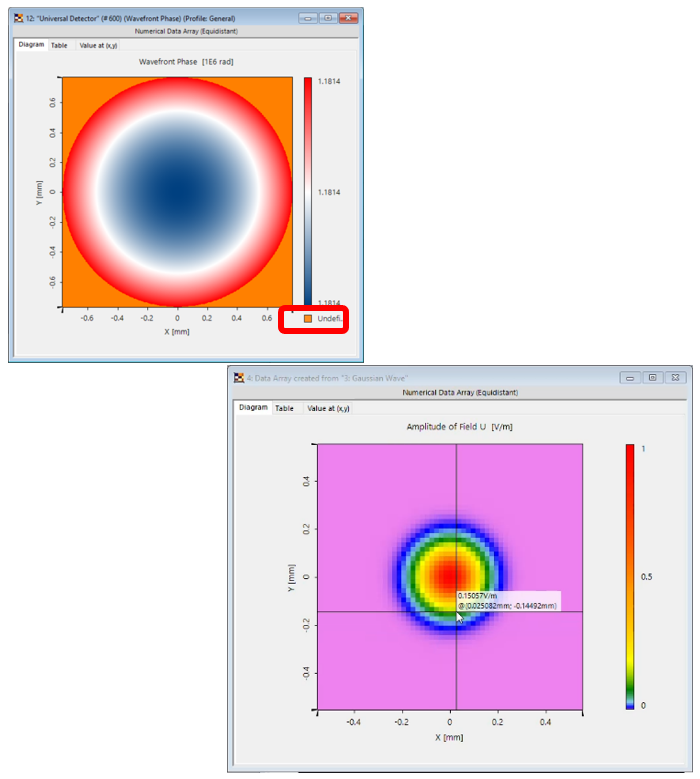
• VFL2023.1可以对未定义区域填充不同的颜色。 )KqR8U�O��
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 X?6h>%) �k
�y^�AA#kk�
 y@M}T{,��/
y@M}T{,��/
$&�8h=e~]-
Graphics Add-ons提供更多数据视图选择 O$V�m#|$sq �&Bn; V�i� �VM�]IL%AN
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。
Is@��a,k
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 N}��Ks[�2
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 7�I(t,AK�J %<�?c��iU 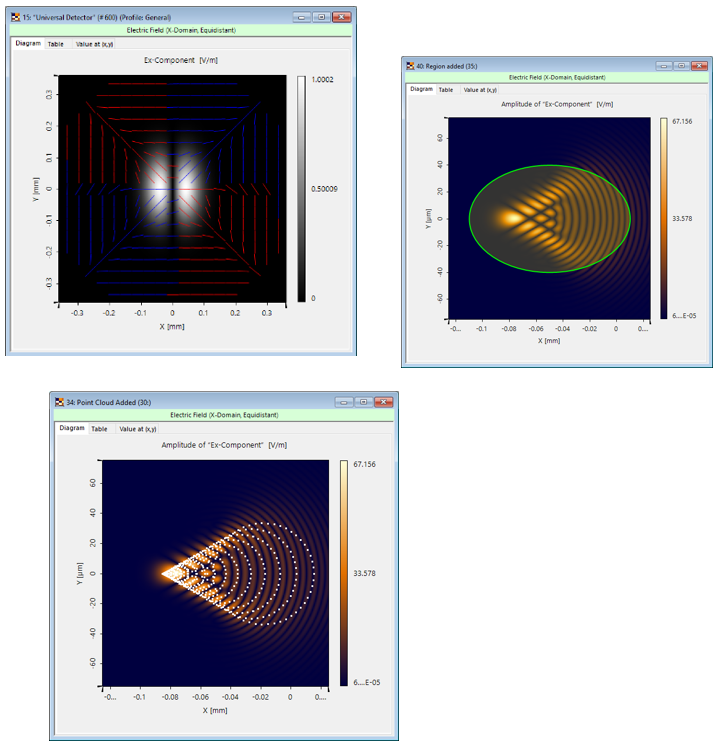 ��JQ_gM._3 �~RXpz-Ye� �8'lhp�2#h Graphics Add-ons提供更多视图选择 ]�VW�f�d�G C|f7��L>qe
��JQ_gM._3 �~RXpz-Ye� �8'lhp�2#h Graphics Add-ons提供更多视图选择 ]�VW�f�d�G C|f7��L>qe • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
H\�I!J�@6g • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
��<}�
y��p • 图像组件提供了多样化的配置选项。
�
xD����� I/Jp,�~JT* 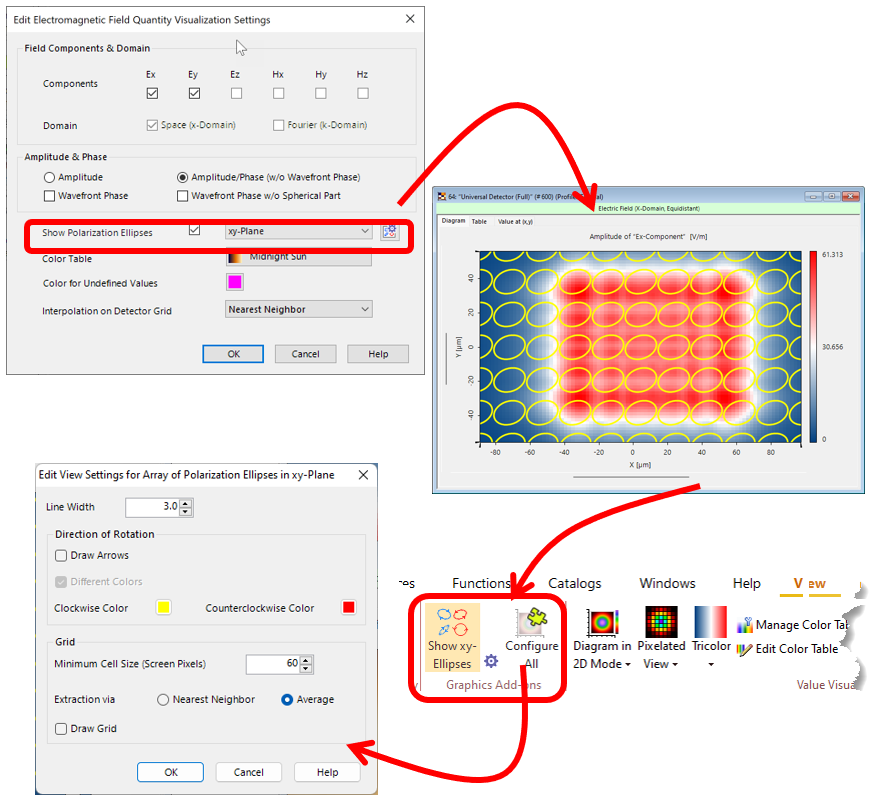 "F�"�_���G >J}n@���MZ {�(O�Iu]: Graphics Add-ons: 增加了 Point cloud 功能 bV�`C�;RPn q{GSsDo-:V �hR�r�1#'&
"F�"�_���G >J}n@���MZ {�(O�Iu]: Graphics Add-ons: 增加了 Point cloud 功能 bV�`C�;RPn q{GSsDo-:V �hR�r�1#'& • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
V�->%)d3i� 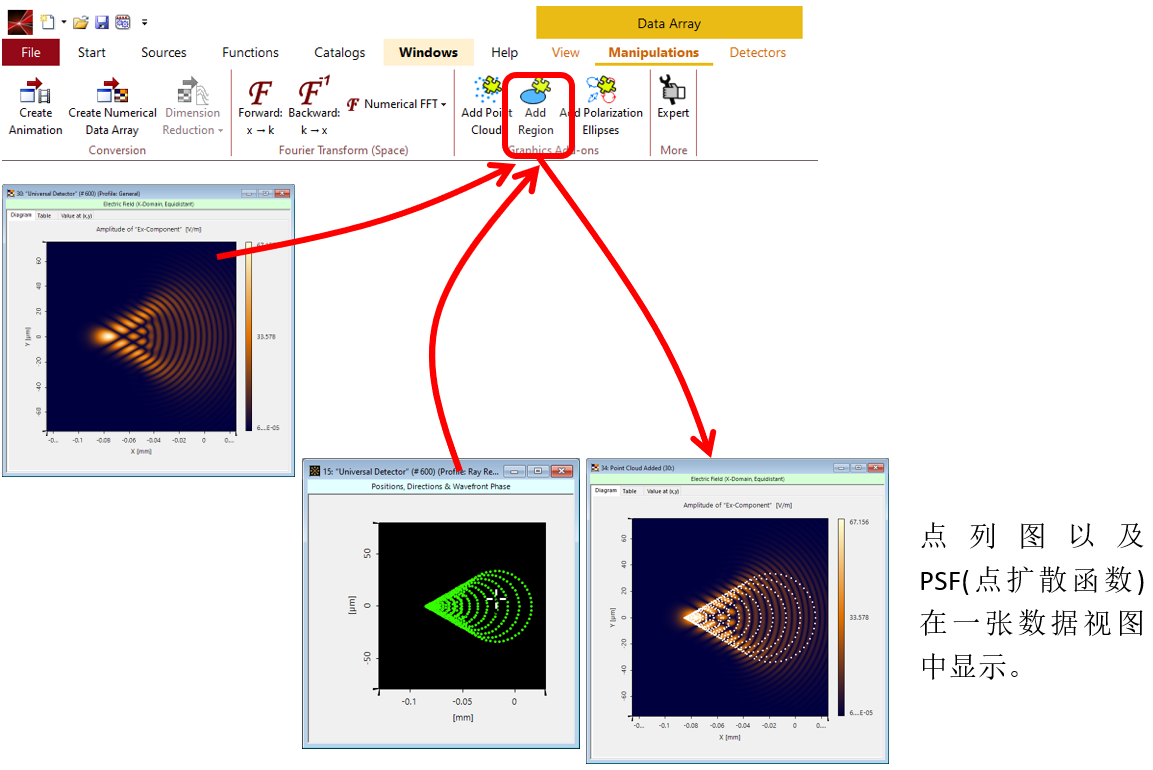 ~u0�xX�fv# �fT3*>^Uv� VirtualLab中的区域 (Regions) fc�ICFReyV -�k&{n�D| (�s"iC:D6U
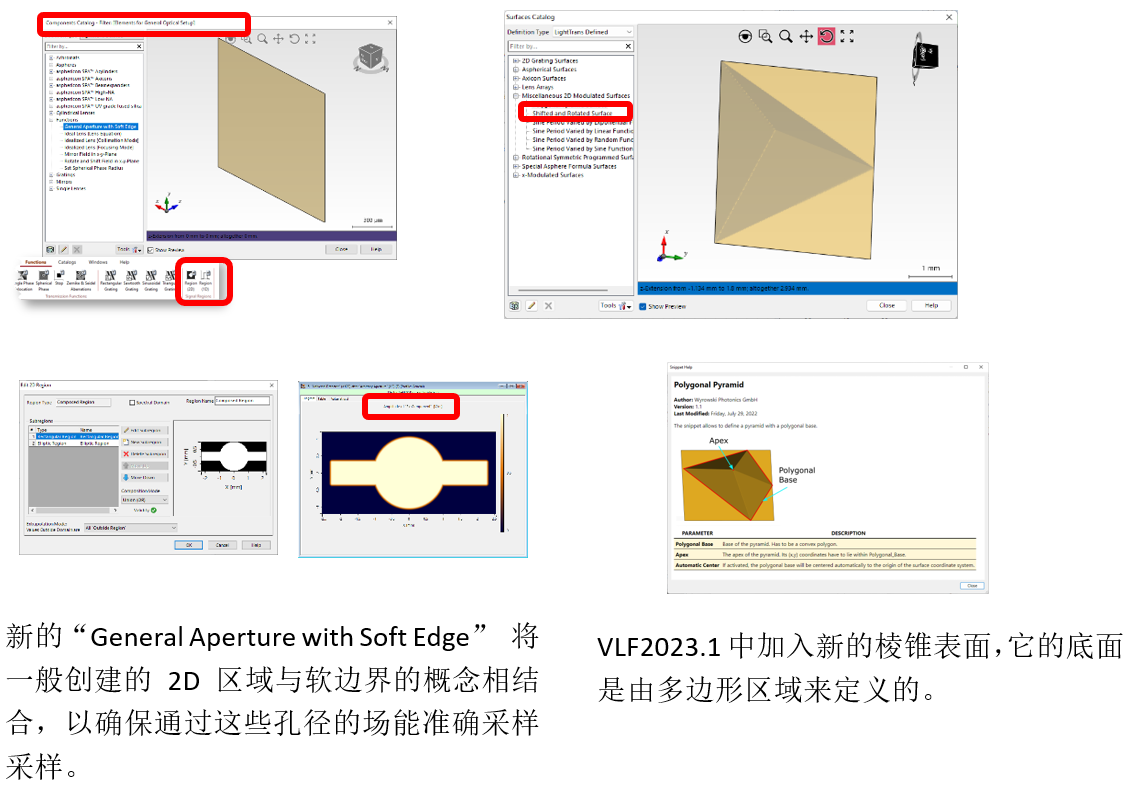
~u0�xX�fv# �fT3*>^Uv� VirtualLab中的区域 (Regions) fc�ICFReyV -�k&{n�D| (�s"iC:D6U • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
@�%<?GNS�O 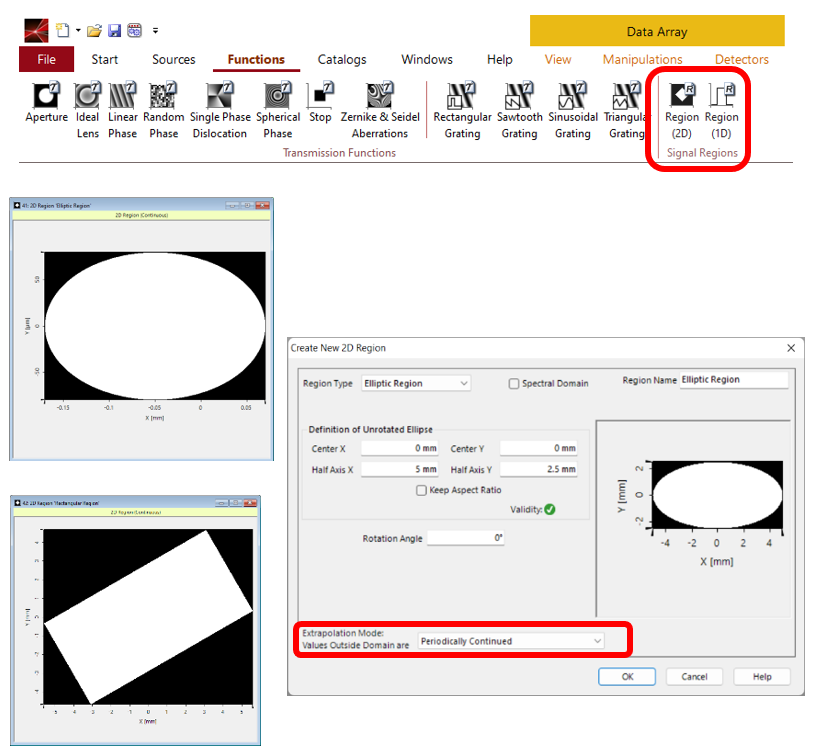 hoR�=%pC�* Lq-��33#n/ �4C�1FP�rh Graphics Add-ons: 添加区域(Add Region) H�RV*x!|I um��j�hG6� EF=d�Xm/\
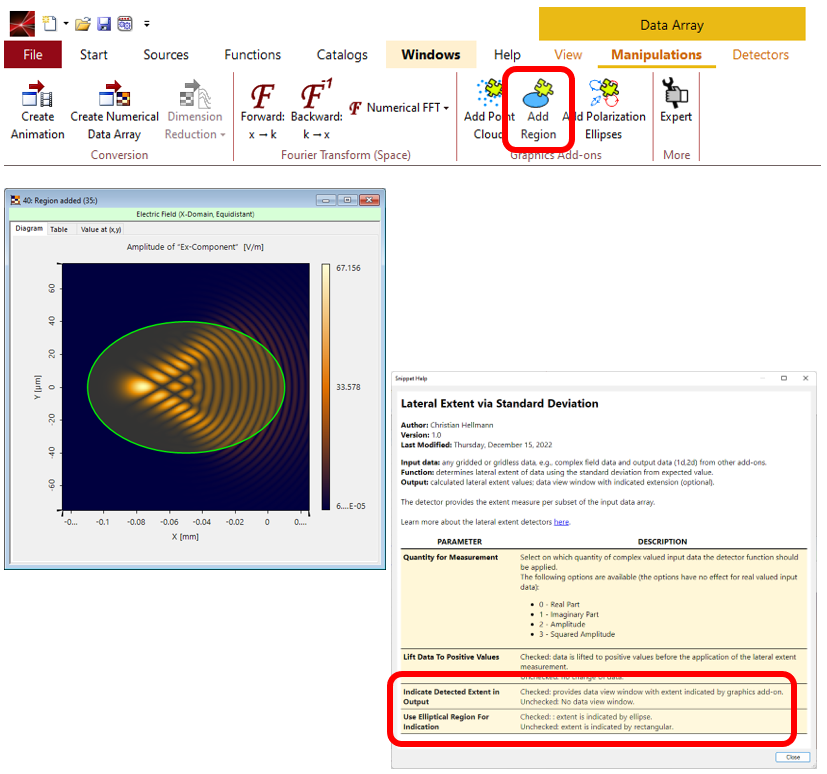
hoR�=%pC�* Lq-��33#n/ �4C�1FP�rh Graphics Add-ons: 添加区域(Add Region) H�RV*x!|I um��j�hG6� EF=d�Xm/\ • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
�Mjj}E
>�&  s^�>��lOQ= iS"8X#[]�N
s^�>��lOQ= iS"8X#[]�N 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
�
gt_X�A�H 5!AV!A_J�p Graphics Add-ons: 添加区域(Add Region) NLQE"�\#�a vWl�[�l
-E *AH^%!�kVP • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
_(6�`{PW�Y i<m$#�6�<Z 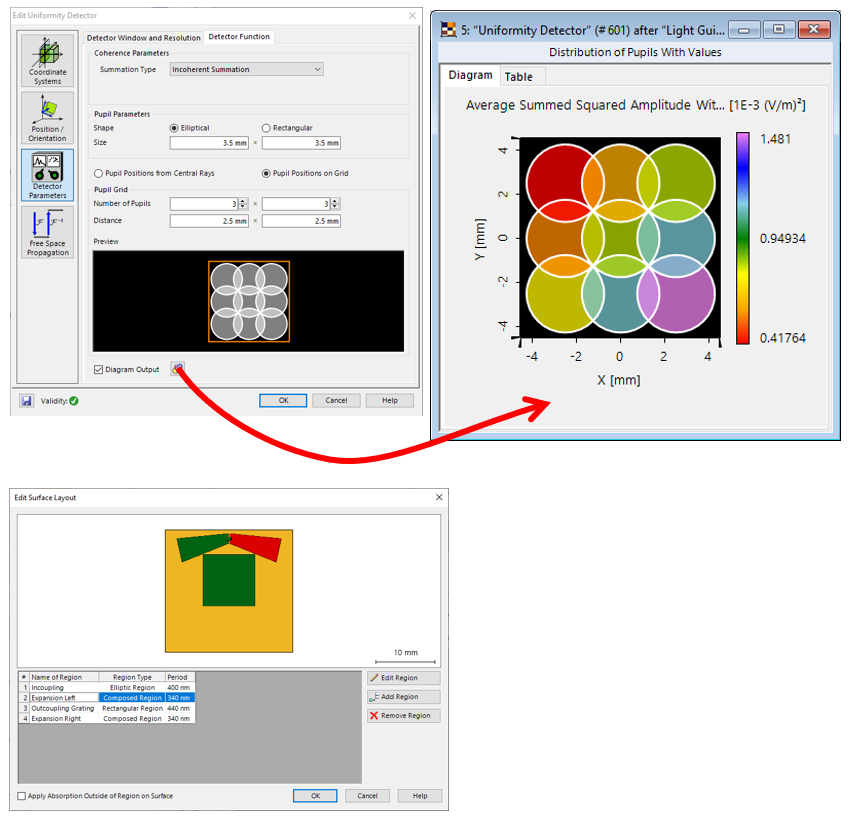 ��C�q��gk
��C�q��gk • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 xP/�OsaxN� C�]'g:93L� #9`��r�XEz • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
nlzW.�OLM • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
ejklpa �./ 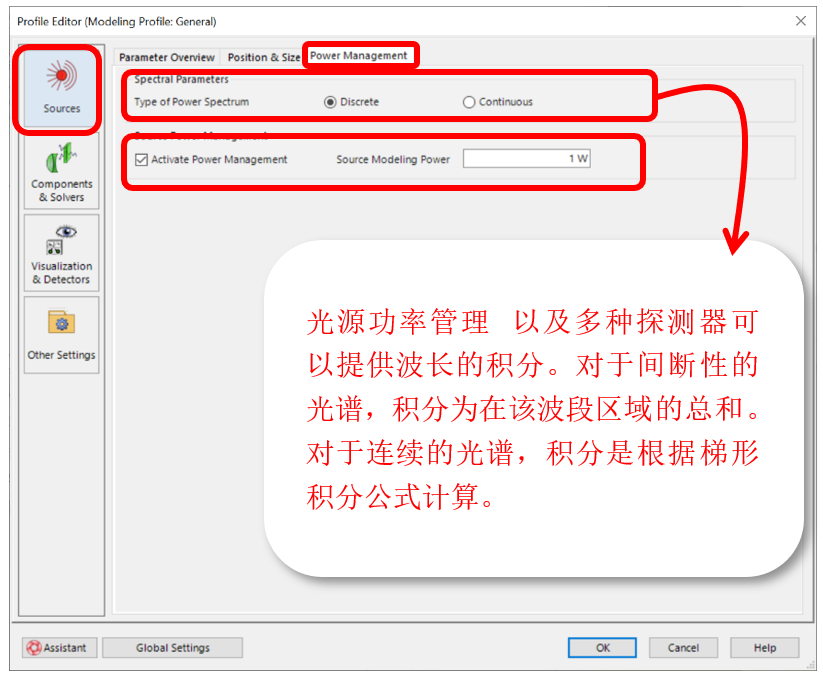 mP pvZ���
mP pvZ��� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
A�)h�hnb0o 1. 针对给定光源参数,进行光源功率的评估。
;cI#S%uvpn 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
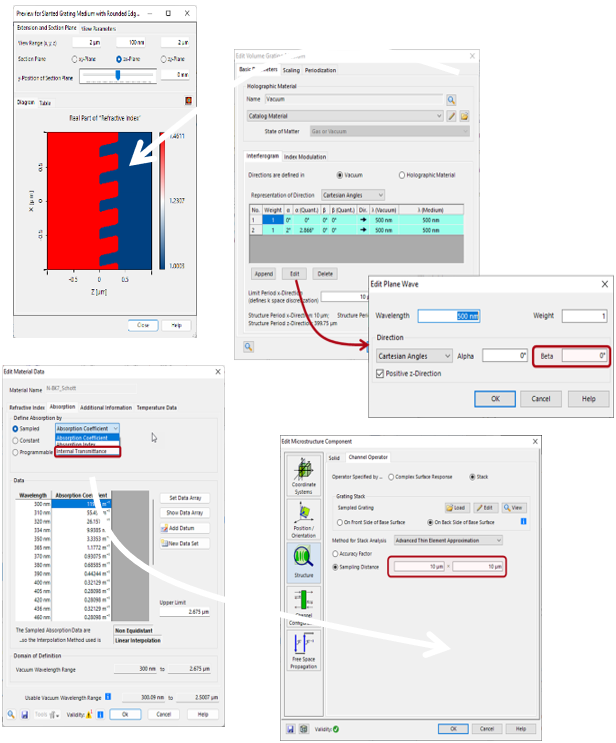
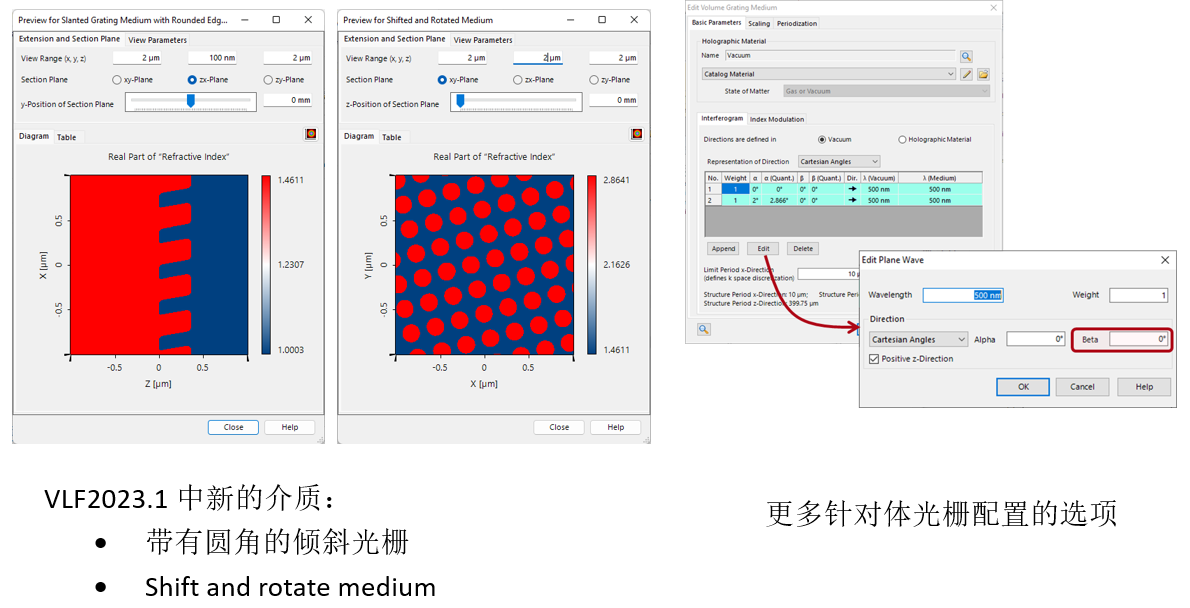
,;.�B��4 w<�6��5�S� 组件 URK!W�?3c� 组件(Component)新的特征 iv�zAlw��P yGvDn' m BWUt{,?�KU • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
dTN$y\���
 CV�&�zi��6 _B�V`,`8}� 组件(Component)新的特征 >5;N64]!)�
CV�&�zi��6 _B�V`,`8}� 组件(Component)新的特征 >5;N64]!)�
�A�Jyq>0�p
 �r��<�*�O�
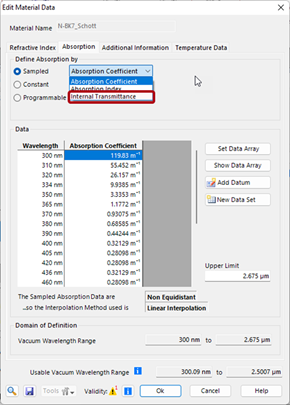
�r��<�*�O� 吸收特性可以用采样数据定义吸收率以及透过率。
{'h_'Y`bOQ �w�E$�s'e 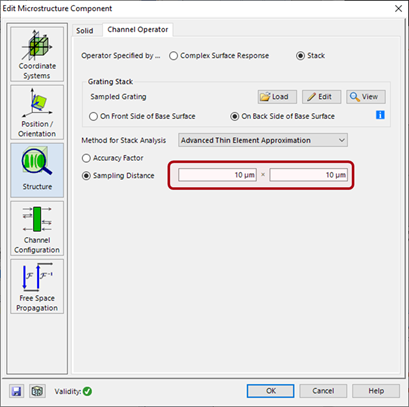 ��53��
@oP |2)Sd[���q
��53��
@oP |2)Sd[���q 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
TDlZ!�$g( $!G`�D���= 组件(Component)新的特征 ImIqD&a-h�
�^qxdmMp)l
 [yw�%�i�h) dv;9QCc'� 组件(Component)新的特征 X��Orcygb2
[yw�%�i�h) dv;9QCc'� 组件(Component)新的特征 X��Orcygb2
XR�a(�sXA3
 �]g�u1���# )Zas
�x�6` 组件(Component)新的特征 X�H�s��d�-
�]g�u1���# )Zas
�x�6` 组件(Component)新的特征 X�H�s��d�-
90�~*d�N�k
 P#�#Z[$IJ3 r�A,CQypo SI�q1�X'�7
P#�#Z[$IJ3 r�A,CQypo SI�q1�X'�7 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
Sx���8l<X� 处理日志 W57&\�PXYn |;P�^clS3 扩充版的处理日志 q
����IM� �T2wv0sHlt �_J�,�xT� • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�o{�V#�f_o 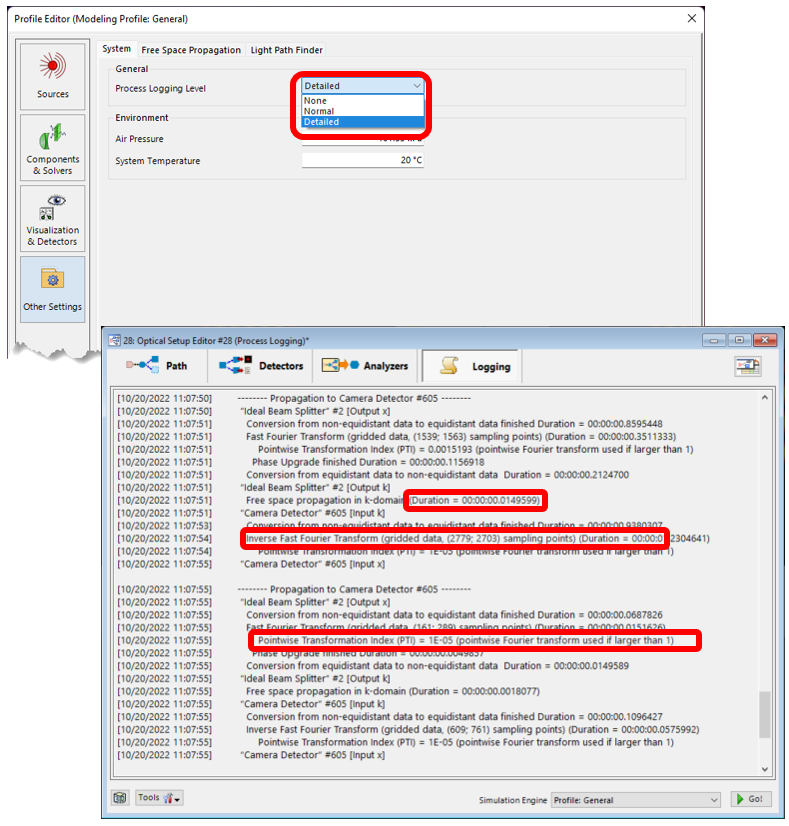 �<_9���!
� M>T[!*nTj� 系统仿真分析 bG�N
5�4{f cw�;�co@!$
�<_9���!
� M>T[!*nTj� 系统仿真分析 bG�N
5�4{f cw�;�co@!$ • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
�`<�^*jB@P 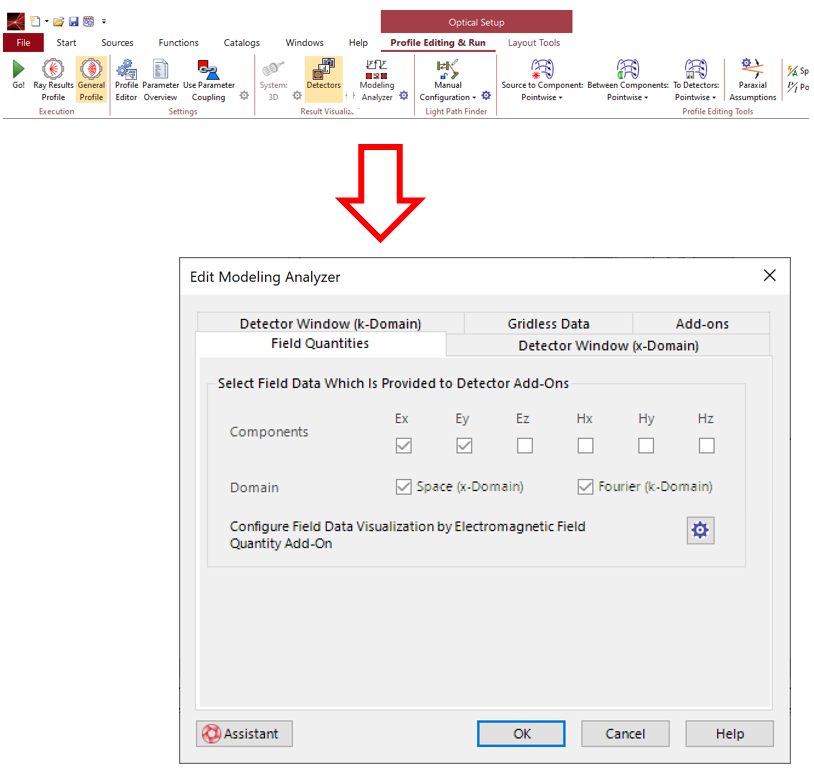 Z�,Wub��X< P@�gt�di(Q 专家模式(Expert Modus) lE�HwZ<�je zmI5"K"�'F 专家模式中的数据阵列’Manipulations’ "tL2F*F"6X KmQ^?Ad-�C Wr5�Q5s)�c
Z�,Wub��X< P@�gt�di(Q 专家模式(Expert Modus) lE�HwZ<�je zmI5"K"�'F 专家模式中的数据阵列’Manipulations’ "tL2F*F"6X KmQ^?Ad-�C Wr5�Q5s)�c • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
@EH��Ip{0. 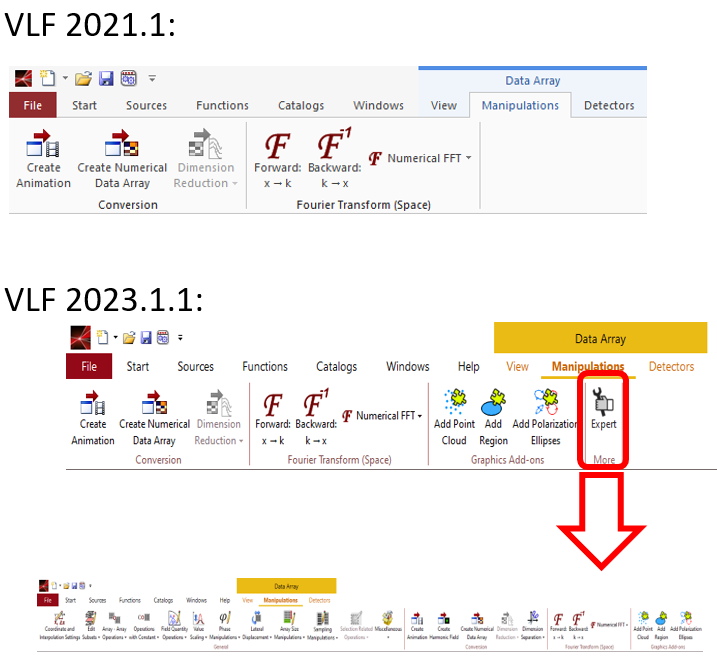 as�r=m{C�" 3���_W{T@T 微小的改进帮助:新的计算器 �S[mM4e�t| �V&i2L.{G) Wm���NYO,>
as�r=m{C�" 3���_W{T@T 微小的改进帮助:新的计算器 �S[mM4e�t| �V&i2L.{G) Wm���NYO,> • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
EMlI�xpCn: 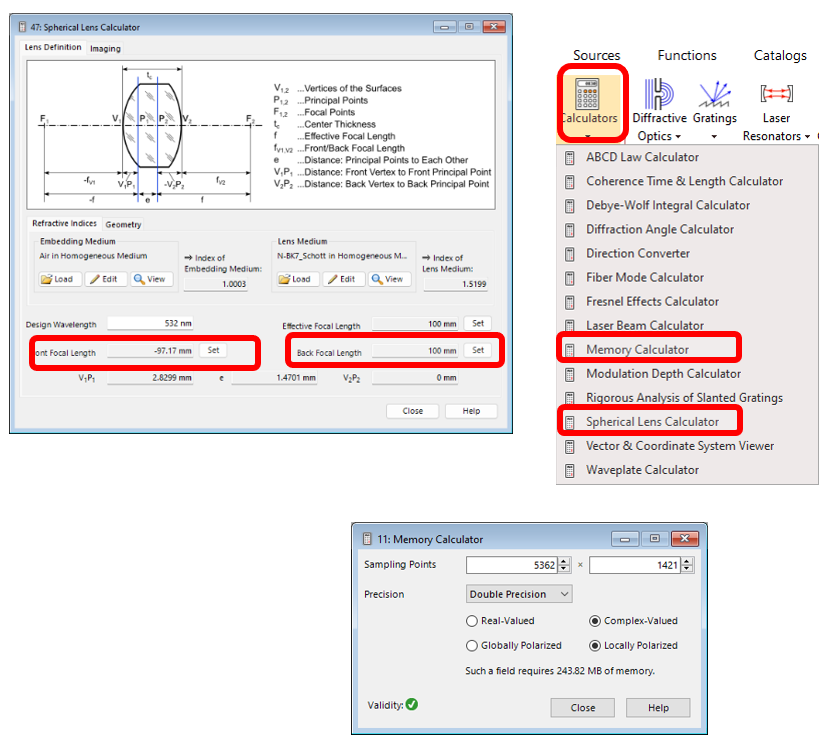 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



