1. 描述 #g{ZfO[#� ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 > ��g8;x#� ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 %=S^{�A��� ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 Bu�>srX9f
o*f7/ZP�1o 2. 系统 }v0oFY$u`H l�
K}('7\ 文件名:UseCase.0082_FocussingSystem.lpd
}n�:��'@�} 3. 透镜系统组件编辑 �ZaH<\`�=%
2z����tP�'
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 �%Ofa�B�v&
■ 透镜系统是由序列光学表面(OIS)定义的。 :~��zK0v"
■ 每一个可选项都有独立的参数,并可以设定。 ~�hE�"B)
e
■ 包括序列光学表面和光学介质。 IA$:r@QNx8
iW�-w?!>|m ,��hT t]�w 4. 光线追迹系统分析器-选项 P9G c)$6{p c/x ^I{b�* &=<x��&4H+
■ 分析器允许用户指定使用光源的光线选项。 E2LpQNvN%g
■ 可以选择选取光线的方法: 1 c3gHc7{t
— 在x-y-网格 Y71io^td~j
— 六边形 l�y�F�~E�
— 自由选取 80![aj}z4G
■ 每一个可选项都有独立的参数,并可以设定。 9�Fv�1D��� b5No>U) �/ 5. 系统的3维视图 3-lJ]�7�OT `rbT�B��3? 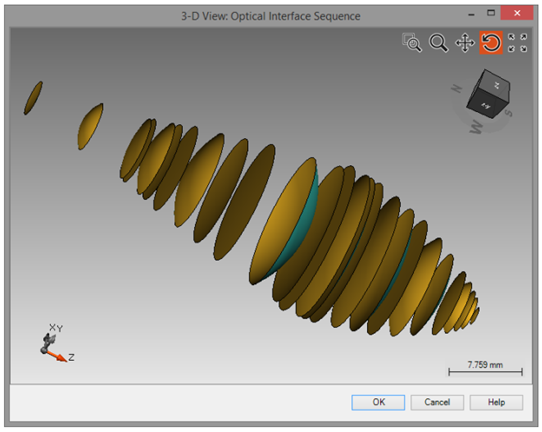 QuT8(s1Q!�
QuT8(s1Q!� 光线经过整个光学系统的三维视图
�9E'��f�M� 光线经过整个光学系统的三维视图(局部放大)
��EcxP�bRg [a:y��KJ[ v*Ds:1"H-I
�[<���\�k !_ZknZTT >v7fR<(%s 8. 透镜系统后虚拟屏的结果 A'vQ�tlvKA =
NH�u�j�. ��UbNA|`�H
■ VirtualLab可用于计算点列图。 O-J;�iX��}
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 #�tg,%*.�s
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 mF�fw*,M��
■ 你可以通过下面的操作将背景颜色该为白色 ?oana%���
?oana%���
F0��:|�uC4 9. 焦平面上的结果 \X.C�YkgK
s~
||V�v!
I
L�]uw �
■ 在左侧图片中可以看到焦平面上计算出的点列图。 ��yY_(o]k�
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 8,B?�!�%FP
■ 焦平面上的光斑尺寸为183mm POvx���ZU�
■ 此外,背景颜色也可以预先设置。 )��[fjZG[
■ 该测量采用均方根(RMS)计算法。 w0q�rh\3du `�_%U�K=m
10. 总结 ?YE�'J~0A6 ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 8T6���L��D ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 z=�mH�\!�� ■ 此外,系统可以直接利用光线追迹引擎进行分析。 H<_BnT���# ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 bfo..f-0/Y
bfo..f-0/Y



