二组元连续变焦
系统实质上是对三组元变焦补偿形式的简化。他利用后面的变焦组的轴向移动产生系统变焦比,由于变焦系统运动产生的相面位移量有前组位移补偿。该形式变焦系统的前组不是固定组,为此对此类系统还要在前方设置一块保护玻璃使系统密封。二组元连续变焦系统多用于变焦比较小的系统。
PvKG��B01_ 二组元连续变焦系统的结构形式如图1,其计算结果及凸轮曲线分别如图2及图3。
(~|)Gmq�2� 图1.二组元变焦系统高斯计算窗体
$Go�S�?\G 
图2.二组元系统自动优化结果
P, x"�!�[6 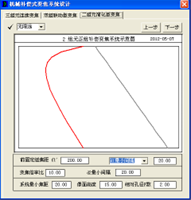
图3. 二组元系统凸轮曲线 \�ZnA%�h�C
]W�3�u�~T* 变焦
光学系统各组元初始结结构设计
1D%P;�eUDp x.�t<�@y�~ 有了系统外形尺寸分配及各组元PW值要求后,可利用本程序胶合
透镜自动设计功能对系统各组元进行初始结构
参数设计求解。求解时有两个方法选择。
q~>!_q]FE 5?3�v;B�6 ① 简单系统初始结构设计
W� *�0!Z:? F,Y�P�Il� 对于一般的
光学系统,各组元结构比较简单,或只使用单透镜、双胶合透镜以及单透镜与胶合透镜的组合就可满足要求。这是就在“机械补偿变焦系统设计”的界面内,OCAD就可以自动利用程序中“单透镜及胶合透镜结构设计”的功能依次自动设计完成。这是需要在当前窗体内继续点击“下一步”,就会出现如下界面。
|@�d(2f��8 �->#wDL!6� 图4.初始结构设计界面 �2tU3p<�[�
~U+<�J�C Z 界面内显示刚计算出来的系统外形尺寸以及对各组元PW值要求等数据,这些数据就是对各组元进行初始结构设计的依据。界面内表格内后两项显示“选择”和“保存”,可以通过“选择”栏选择相应组元进行该组元的初始结构设计。经选择后。界面立即出现“胶合透镜结构设计”窗口,并自动填入该组元
焦距、孔径等参数。然后根据具体情况选择单透镜和胶合透镜组合结构,并根据对组元PW要求选择玻璃
材料求出表面半径等一系列初始结构参数值。
6I�[*p�0j5  ���GS*O�{u !��fs ~ �>
���GS*O�{u !��fs ~ �> 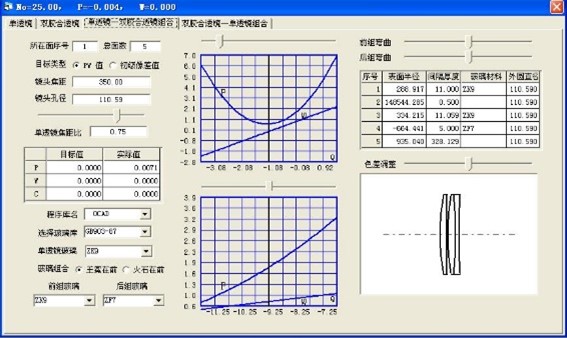
图5.初始结构设计界面
�m�q{Z
�Q' $�7X;FmlG& 求出组元结构参数后同时在主界面的光学系统结构数据表内显示对应数据。由于以上求解是根据薄透镜原理计算出来的,加上实际厚度之后,透镜实际焦距可能有所变化,此时还可以利用光学系统结构数据表内缩放焦距的功能对组元焦距值进行修正,也还可以对具体结构的透镜厚度进行修改甚至进行规格化处理。以上完成之后,点击窗体内表格栏内对应“保持”栏位置,程序会自动保存设计结果。
+sJ{�9#��6 tE>F���L� 图6.缩放组元焦距
�(,"%fc7<i 
图7.保存设计结果 q�X�&��+��
�6cg,L:j# 依次重复以上操作,可以完成系统所有各组元的初始结构设计。然后点击窗体右上角“下一步”按钮,程序又进一步完成各组元设计结果的组合,组成完整的机械补偿式连续变焦系统初始结构设计数据,包括系统视场、孔径以及变焦系统特殊数据的组合。
v~�R�xtTu B�TsvL>W�y 图8.最后设计结果 ��hgZvti�
�g=�KK
PSK 图9.光学系统结构示意图 6rS
�? FG=
W}F�~��vx. 由于以上设计均为高斯光学求解,为此各组分间间隔均为其主面间隔。当完成初始结构设计后的实际系统的实际间隔会因实际
镜头厚度而改变,再由于在前面外形尺寸计算时所给主面间隔只是个粗略数,有时会使透镜间隔过大或过小,甚至使得实际间隔小于零,发生镜头碰撞。此时必须调整镜头结构,或者重回最初外形尺寸计算,调整初始主面间隔,重新设计。
'�>[��Zf�T ② 复杂系统初始结构设计
Z4��z|��B& 图10.复杂光学系统结构示意图 tL&_@PD)3
-��/��3h&g 对于较复杂的光学系统,某些组元需要复杂化处理,比如组元的通光孔径过大,简单系统满足不了要求,或者在矫正
像差需要,必须时该组元结构复杂化。如下图所示结构,其中后固定组结构就比较复杂。此时可利用“单透镜及胶合透镜初始结构设计”方法利用其中工具条对当前结构进行复制或增添,加入新透镜元素。比如前固定组改为在胶合透镜好单透镜组合的基础上,做双分离处理。
`�B�?+1�Gv )~P<ruk>,C 图11.修改后的前固定组 �Bl)D/���
DN8I[5�O�� 再比如,要将变焦组改成两个胶合透镜的组合,可以把原来的一个胶合透镜进行复制变为两个胶合透镜的组合,修改界面如下。
;E}&�{w/My 图12.修改后的变焦组 r�:x�g#&"*
gIS����A13 如此类推可以进一步对任何一个组元进行复制处理,直至满足要求。最终完成全部设计。



