示例.0082(1.0) �Zd'�)5�7{ ^�Gq�t+K�% 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 1
=M ?GDc�
SF>c\e�Ttx 1. 描述 �� {PVW�D7 ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 m�+Rv+�_�R ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 �tQB�RA/� ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ;u�>DNG|.�
��=_:et��0 2. 系统 �[@5Ytv H H�x�IIO[�h 文件名:UseCase.0082_FocussingSystem.lpd
E6pMT^�{�K 3. 透镜系统组件编辑 �J��W3B'_0
3G�(miP�6�
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 )�3>hhuaa�
■ 透镜系统是由序列光学表面(OIS)定义的。 }#n�;C{z2e
■ 每一个可选项都有独立的参数,并可以设定。 �}Nf%�n�@�
■ 包括序列光学表面和光学介质。 |��v({-*�7
Yo�|,]�X>/ mD�^��jd�+ 4. 光线追迹系统分析器-选项 }n4�V|f-�� l�x�[oaCr� `|�ASx8_�!
■ 分析器允许用户指定使用光源的光线选项。 "$2�y�-�|�
■ 可以选择选取光线的方法: ;e1ku|>$��
— 在x-y-网格 $d_|Ns�svU
— 六边形 t�}��,/}b�
— 自由选取 [O?z�@)dx�
■ 每一个可选项都有独立的参数,并可以设定。 T Kg aV;92 �Ndi9FD3im 5. 系统的3维视图 z}��*9�uZ �oz}+T(@O� 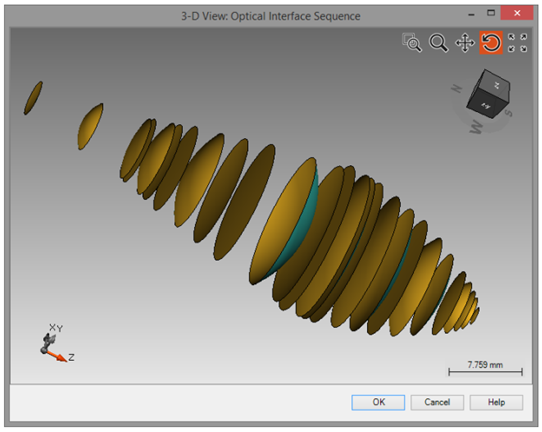 �HBu�[gh;b
�HBu�[gh;b 光线经过整个光学系统的三维视图
qa�0 yg8,< 光线经过整个光学系统的三维视图(局部放大)
g.�zEn/�SM ^$'�z!+QRM Nw1#M%/!r! Stu4t�==U� +h r@#n4A� /Xz�H?n/{R 8. 透镜系统后虚拟屏的结果 W8KDX_v�GJ )~H�Uo9K9 \l]DQ�aOEe
■ VirtualLab可用于计算点列图。 �X;"Sx��#U
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 aD=A^k�t�x
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 -\
E�P.Vtz
■ 你可以通过下面的操作将背景颜色该为白色 {6_|/KE9_�
{6_|/KE9_�
(K)]��qNH� 9. 焦平面上的结果 �(4d�h�u�T
5��yzv|mrx
urMG*7i <c
■ 在左侧图片中可以看到焦平面上计算出的点列图。 M>i9�i�-dU
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 (��?(zH��3
■ 焦平面上的光斑尺寸为183mm �X0haj~o[�
■ 此外,背景颜色也可以预先设置。 Cif�>��7]M
■ 该测量采用均方根(RMS)计算法。 �2M68���CE }l],.J\BGX 10. 总结 ��R�}4�So1 ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 32/MkuY^u ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 [g:$K5\6�4 ■ 此外,系统可以直接利用光线追迹引擎进行分析。 A�<qT�g`gA ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 qT�`�k*i?



