-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-16
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
测量系统(MSY.0002 v1.1) ~j'D%:[+VH 应用示例简述 ^)~S�mj^d�
1. 系统说明 Xx{�| [�2` 光源 �94+^K=lAX — 氙气灯(部分相干白光) mia�H��,hm 组件
]
#@:V�R — 分束器和合束器,消色差准直透镜系统,平面反射镜,待测样品 lH4Nbluc^ 探测器 ]ub"O�sX�C — 强度分布表现出不同的干涉效应 >+a\B�K"k� 建模/设计 m"n74�cx�S — 光线追迹:初始系统概览 �-xH��R�6 — 几何场追迹Plus(GFT+): [t?t�LUg|6 部分相干白光会减少干涉条纹的对比度 �x
v�s�=�T 扫描样品的高度轮廓时光强会发生变化 .D
4G;=Q jg710�.�v: 2. 系统说明 �Wlh�h0uy� 参考光路 �u2oS Ci�� 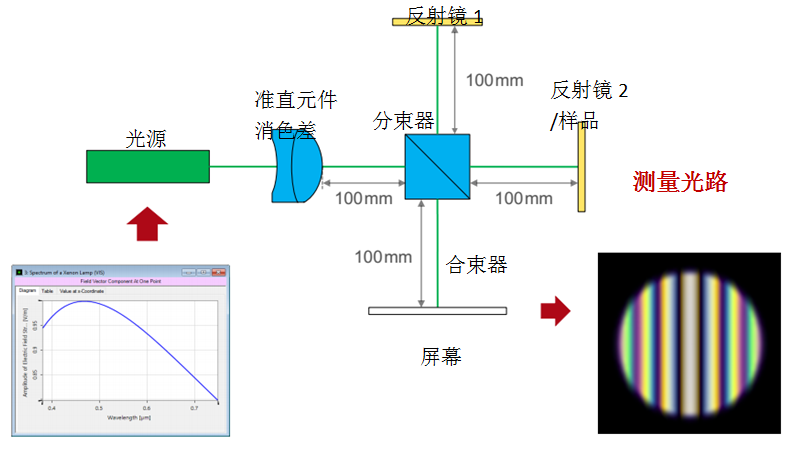
#"N60T��@� LeL�Ut<4�~ 4. 总结 +��& B?��f 迈克尔逊干涉仪装置白光干涉图案的研究以及作为高度扫描装置的应用 ,�p �d�-hu 1. 仿真 &�s+l��/;3 以光线追迹对干涉仪仿真。 ']1n?K�=A� 2. 计算 P\j���\p
= 采用几何场追迹Plus引擎以计算干涉图样。 XPX?+W=�mv 3. 研究 r�@4A%�ql< 测绘扫描仪的仿真和样本高度轮廓的测量 �y|�6n:�<o XGB\rf��vS 利用VirtualLab软件可对迈克尔逊干涉仪生成的干涉图案进行研究分析。 &�>zH.�6%$ NfvPE�]S�� 应用示例详细内容 *6/I�O&y1a
系统参数 \jiE���:Qt
Y"mFUW��4� 1. 仿真任务:迈克尔逊干涉仪 ,m=�G9Q�cN
�Xf`e��� 4 通过使用这种干涉仪装置,可测量两光束间的相对光程差。 k`:�zQ�d^T pN�[WYM�?[ 事实上,结合白光光源的有限相干长度可以研究样品的高度轮廓(轮廓扫描干涉仪)。 �1�p}H�,\o
SboHo({5VA 2. 参数:光源 1�C�<cwd;9
c<�_%KL�&R
|{��N{�VK�
为仿真部分相干光,采用一个白光光源(氙气灯)。 x(Bt[=,K3�
应用氙气灯用于模仿太阳光。 6$R�9Y.s>Z
这种气体放电灯的辐射的光谱与黑体极其相似。 Pf[E..HF*d
由于41个波长,光谱的形状是离散的,并具有相应的振幅。 �sUG!dwqqd
由于输出区域较小,氙气灯可视为点光源,并输出近似球面波。 �g�$K\�rA�
KoERg&�f�Y 3YvKHn�|V" 3. 参数:消色差准直透镜 `M�U~��N�_
0vv�~G\yM�
n~ *|�JJ*`
为了实现光源的准直,使用了一个埃德蒙光学的非球面消色差透镜。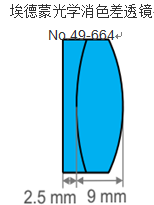 I\Op/`_�=E I\Op/`_�=E
通过使用埃德蒙光学网站上的Zemax文件将消色差准直透镜导入到VirtualLab中。 ]>X_E%`G<b
8gS7�$ EH'
}� �k2��Q� �~&<#�H+O� 4. 迈克尔逊干涉仪光路图 \l�59/ZFan
-uYx�c=4Lh >�jI�.$%L$ 增加消色差系统和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 0fOhCxtL�@ 由于VirtualLab的相对位置系统,必须设置Z轴方向的距离。 l��!tR�<$|
M6g8+��sio 5. 分光器的设置 �{srP3ll
P `;U�Wq{��" !�eF(WbU0
为实现光束分束,采用理想光束分束器。 @"7S$@cO��
出于该目的,在光路编辑器中建立两次光束分束器。 b}��K,wAx
随后的组件(如相位延迟板和理想的反射镜)连接到通道0和通道1,对应于光束分束器的两个通道。 h�P"2X"kz& �U ]<�l-~| 6. 合束器的设置 qfDG.Zee# T-] {���gc
�Tc^
0W�=h
直接通过虚拟屏幕(GFT +)探测器对两束光进行叠加。 n\�"6ol}>E
为此,必须选择两个输入通道的叠加(Yes),才能得到期望的干涉图。 �uVEJV |^/
3}�|[<�^�$ 7. 迈克尔逊干涉仪的3D视图 PJ5}c!�o[�
?� "I �%K% 4zy�Q�"?A~ 添加了扩束器和分束器得距离是为了使3D视图更加清晰(可在光路编辑器中实现) �%,�@pV%2� � �>.
��K� 应用示例详细内容 Z*k(Q5��&U
仿真&结果 .a@1�2J(I�
���@lN\.�O 1. 结果:利用光线追迹分析 R��cY�UO*� 首先,利用光线追迹分析光在光学系统中的传播。 ]�rv\s�D`[ 对于该分析,采用内嵌的光线追迹系统分析器。 e0`z~�z]6&
��$lx�pw�O 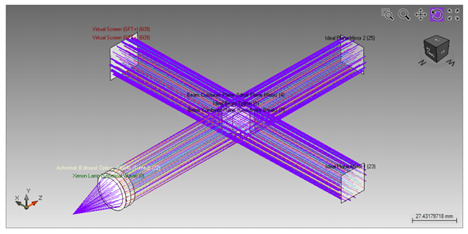 `]KX�`xGK� `]KX�`xGK� 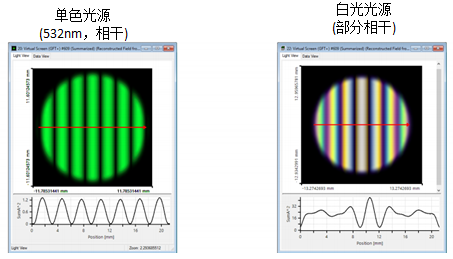 Px��r/*��X Px��r/*��X
��kE:[6reG 对所用白光光源的时间相干性进行研究。 ��7"�(Zpu� 因此,利用参数耦合和参数运行,使测量路径的长度在由199.99mm到200.01mm之间变化。 +9T�c.3v�Q 为生成干涉图样,通过使用绝对方向将反射镜2倾斜0.005° IhNX~Jg'^ 结果可以以独立的文件或动画进行输出。 <�\�#'�o} 由此产生氙气灯的相干长度数量级约为1µm。 O)q4^A�E$
(=�!At)�O 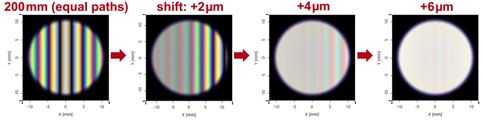 [^��"*I.Z_ [^��"*I.Z_
,�j�_js8r�
D������kWp
由一个样本替换反射镜2,该样本具有特定的轮廓。 o�|�@0.H|�
改变路径长度并结合有限的相干长度,可对样本的高度轮廓进行研究。 (����� c�s
因此,对于相同的路径长度,接受到的最大光强能够体现高度等级。 @vl�$[�Z|�
相长干涉得到最大光强。 AX v
q�~XE
DsMo_m/"1� [B�E_^d5&� 5. 结果:轮廓扫描干涉仪 �2_wue49-l 计算3个不同路径长度的光强分布(200mm,200.1mm,200.2mm)。 F*KQhH7G�f 被研究的仿真样本(具有浮雕结构的1欧元硬币)表现出3个明显不同的高度级,可通过模拟设置进行说明。 (%B{=�w}�8 因此,VirtualLab可对这种基于部分相干光干涉测量的轮廓扫描系统进行仿真。 �_pTcSp�3� E+��/Nicn= 5. 总结 "KIY+�7@S} 迈克尔逊干涉仪及其在高度扫描仪中白光干涉图样的研究 bLg!LZ|S0s 4. 仿真 ��({E�,}x 以光线追迹对干涉仪的仿真。 �> �Z+*�tq 5. 计算 64u(X��^i� 采用几何场追迹Plus引擎以计算干涉图样。 @�\�g}I`_M 6. 研究 6�3�oe0�T& 测绘扫描仪的仿真和样本高度轮廓的测量 5=?P�6I_$G B=cA$62�0� 利用VirtualLab软件可对迈克尔逊干涉仪生成的干涉图案进行研究分析。 A]b��QUWt2 "B���3�jq^ 扩展阅读 Jt[ug�2��6 1. 扩展阅读 4!/Q��B6 � 以下文件给出了在VirtualLab中如何设置测量系统的更多细节。 p�:xyy�*I �N?qETp�-: 开始视频 �S(��PV*e8 - 光路图介绍 `�Q*`\-8J� - 参数运行介绍 F7<mm7BG�Z - 参数优化介绍 ��6:2*��<� 其他测量系统示例: ��6y^
�zC? - 马赫泽德干涉仪(MSY.0001) �d_,My�l�k
|



