-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-16
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
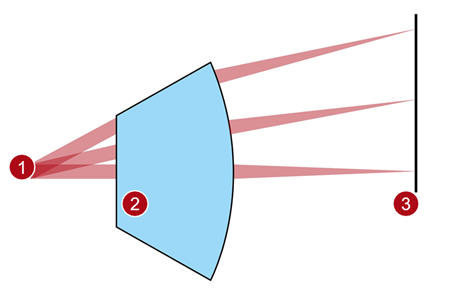
摘要 c`U�F�NNm= �lN8l�71N^ F-Theta 透镜通常用于Galvo类扫描仪的激光材料加工系统。 对于这样的镜头,聚焦点沿目标平面的位移与镜头焦距和扫描角度的乘积成正比。然而,没有完美的 F-Theta 系统,因此在任何给定的系统中都会出现与理想行为的偏差。 借助快速物理光学建模和设计软件 VirtualLab Fusion 中的扫描源,我们通过测量不同角度下实际光斑位置与期望值之间的偏差来分析给定 F-Theta 透镜的性能。 >p0,]-.J,r �$��+ N~Fa 任务描述 {�o�5^nd�� �"w�g$ H1K 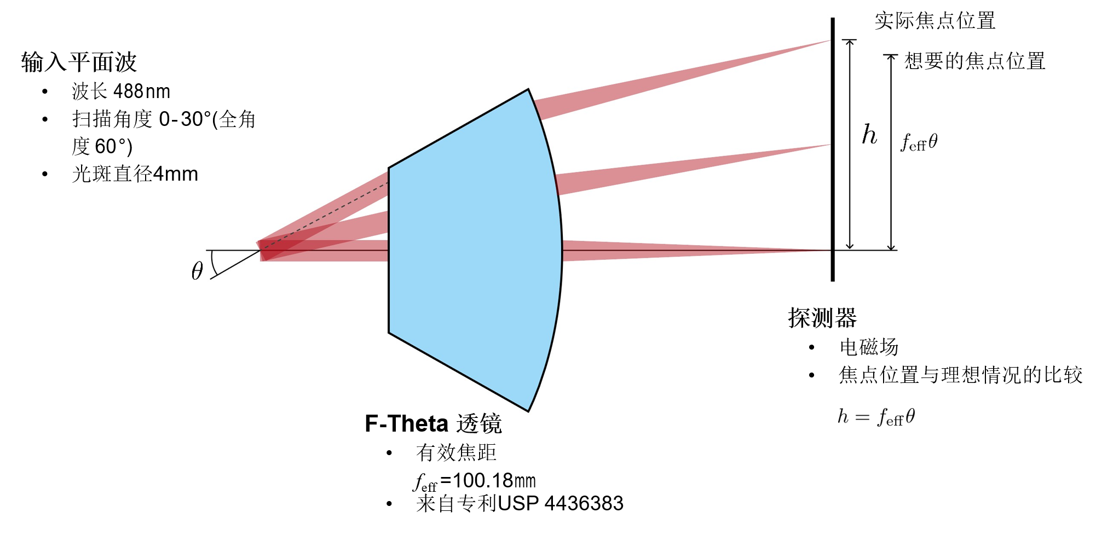 #d*g�Wwnx" 系统构建模块 - 扫描光源 L�|:�C���Q ��RLL%��l� #d*g�Wwnx" 系统构建模块 - 扫描光源 L�|:�C���Q ��RLL%��l� 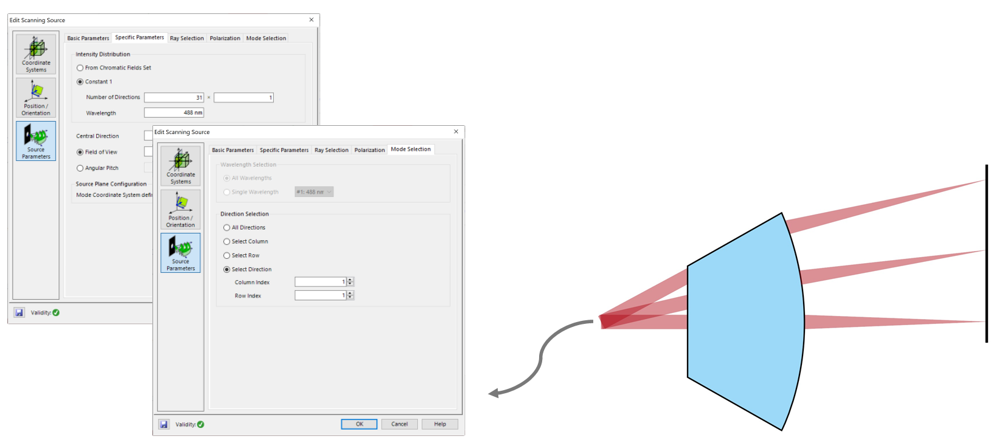 lK�Q�evoy' %�;R&cSZ�� �WHOX<YJs� 可以使用扫描光源定义生成一组在不同方向传播的截断平面波的多模光源。 md?
cvGD�E $$W2{�vr7+ 用户可以指定应考虑多少模式并定义强度分布。 更多信息如下: ~�tV7yY|zr lK�Q�evoy' %�;R&cSZ�� �WHOX<YJs� 可以使用扫描光源定义生成一组在不同方向传播的截断平面波的多模光源。 md?
cvGD�E $$W2{�vr7+ 用户可以指定应考虑多少模式并定义强度分布。 更多信息如下: ~�tV7yY|zr
�'RF���`XX
如何设置一个扫描光源 1�2hD*,A5j �q8-hbWNm4 系统构建模块 – 镜头系统组件 }
�Xh�L�`%
�dK�C*�QHU
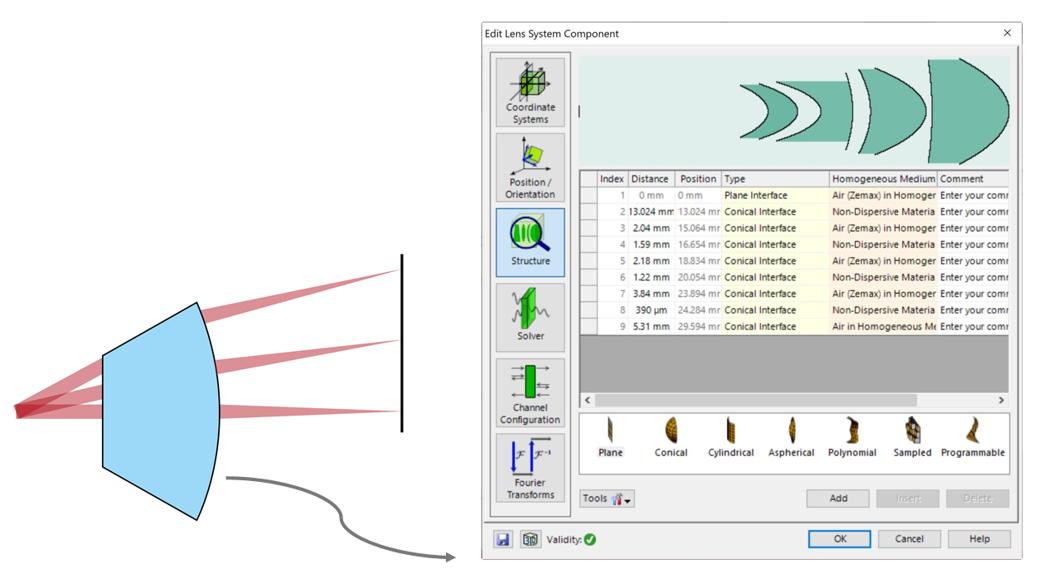 p >ua{}!�L GUqG1u z9 镜头系统组件允许轻松定义由各种界面组成的组件。 可以包括例如:平面、球形和圆柱形界面以及配置它们之间的介质。 c3ru�4o�*K 42A'`io[w] VirtualLab Fusion技术系统构建块——参数耦合 @T�q-�3�Um p >ua{}!�L GUqG1u z9 镜头系统组件允许轻松定义由各种界面组成的组件。 可以包括例如:平面、球形和圆柱形界面以及配置它们之间的介质。 c3ru�4o�*K 42A'`io[w] VirtualLab Fusion技术系统构建块——参数耦合 @T�q-�3�Um
HC�1<�zW[�
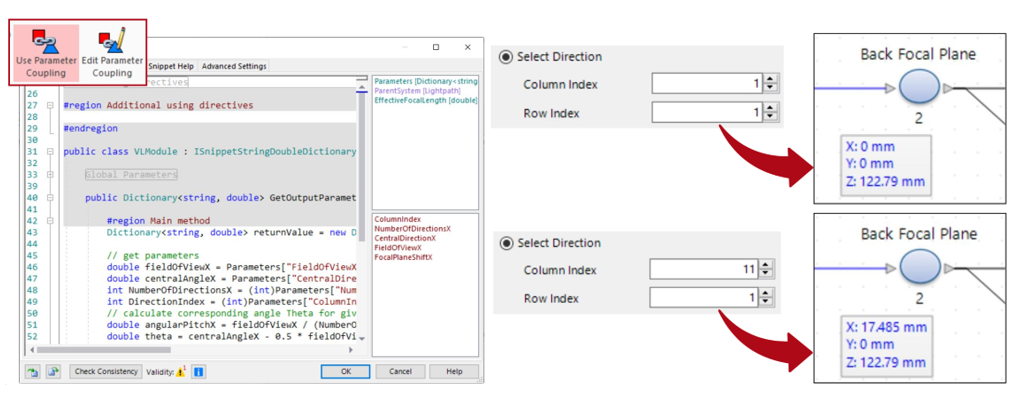 rFkZ'rp74b afna��7TlS 通过参数耦合,可以将系统中不同参数的值联系起来。 在此用例中,此功能用于自动将探测器围绕所需焦点居中。 更多信息如下: ]W4{|�%@H" rFkZ'rp74b afna��7TlS 通过参数耦合,可以将系统中不同参数的值联系起来。 在此用例中,此功能用于自动将探测器围绕所需焦点居中。 更多信息如下: ]W4{|�%@H"
S�:`�Gi>D�
VirtualLab Fusion中的参数耦合 [hpkE lE� u0,QsD)_X0 系统构建模块——畸变分析器 V9qA'�k���
�nnN$?'%~6
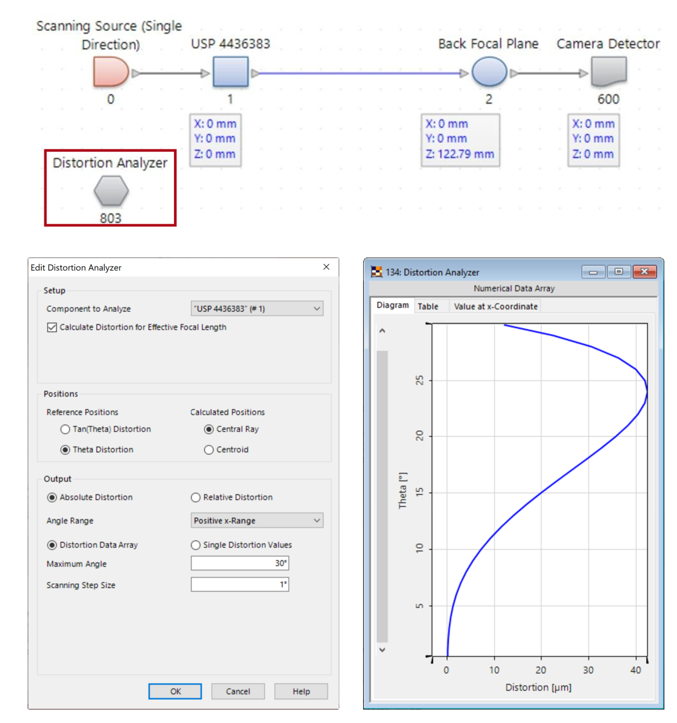 j (Q#�NFT7 .�taP2^2Z� 实际焦点位置与参考焦点位置之间的偏差表明了 F-Theta 镜头的性能。 可以使用畸变分析器计算此信息。 ��+:=F�csY $�w <R".4� 虽然实际焦点位置将通过模拟计算,但参考焦点位置可以指定为角度本身的线性或其切线。 Yt���,MXm\ m�&D�I2�he 总结-组件… CDXN�%�~0h j (Q#�NFT7 .�taP2^2Z� 实际焦点位置与参考焦点位置之间的偏差表明了 F-Theta 镜头的性能。 可以使用畸变分析器计算此信息。 ��+:=F�csY $�w <R".4� 虽然实际焦点位置将通过模拟计算,但参考焦点位置可以指定为角度本身的线性或其切线。 Yt���,MXm\ m�&D�I2�he 总结-组件… CDXN�%�~0h
XksI�.]tfj
 jF
j'6LT9/ jF
j'6LT9/ 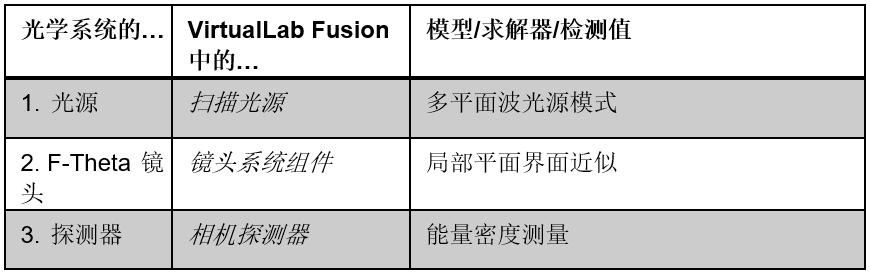 i�zGU&VeB� i�zGU&VeB�
_G��@Z�n[v 系统印象 L(u��@%�.S
}�7b{ZbD�I
 DTM(SN8R+n oYA"8ei��= 性能评估 – 光斑位置偏差 ts�@Z5Yw*! DTM(SN8R+n oYA"8ei��= 性能评估 – 光斑位置偏差 ts�@Z5Yw*!
1#7|�au%:)
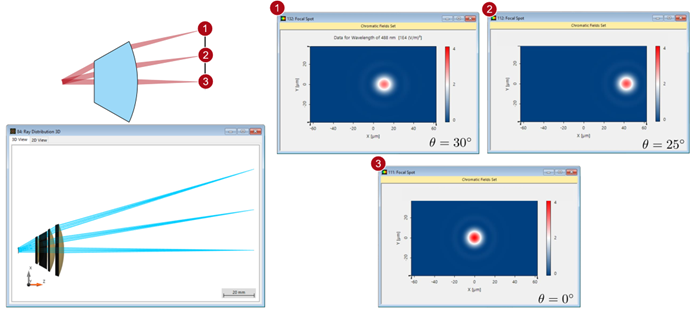
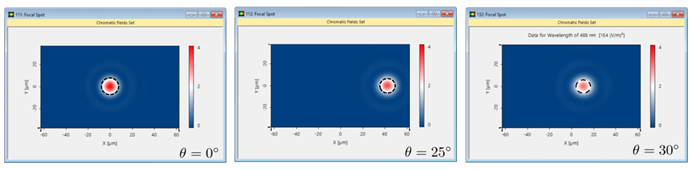
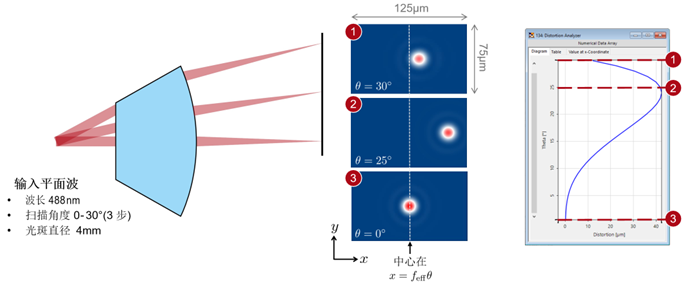 _e�;b��B?S 畸变分析器可以快速估计 F-Theta 镜头的性能,可以通过将场传播到焦平面来进行验证。 s���J^�Ff� DNqV]N�_W� 性能评估 - 光斑直径测量 5mpql[v3P� �DEhR\�Z!� _e�;b��B?S 畸变分析器可以快速估计 F-Theta 镜头的性能,可以通过将场传播到焦平面来进行验证。 s���J^�Ff� DNqV]N�_W� 性能评估 - 光斑直径测量 5mpql[v3P� �DEhR\�Z!�
 %e0X-tXcmX %e0X-tXcmX
U�R=�s=G�| 光斑直径(FWHM) ?��V��+\E2 �kONn7Itbu
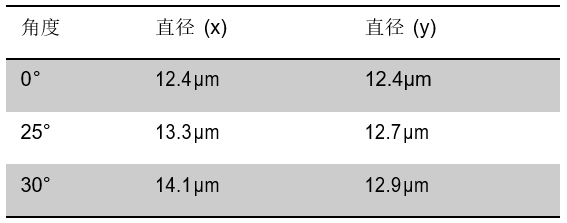 K�@%T5M4j k�dlmj�[=� 此外,该结果可用于对 F-theta 系统产生的斑点进行更深入的分析。 例如,对光斑大小的检查表明,对于更高的输入角度,单个焦点变得越来越椭圆。 �#W�|Obc]K ?E
V^H-r�r VirtualLab Fusion技术 {�jQLr7�'� K�@%T5M4j k�dlmj�[=� 此外,该结果可用于对 F-theta 系统产生的斑点进行更深入的分析。 例如,对光斑大小的检查表明,对于更高的输入角度,单个焦点变得越来越椭圆。 �#W�|Obc]K ?E
V^H-r�r VirtualLab Fusion技术 {�jQLr7�'�
s_RK x�)w@
 "DGap�*=J
E'D16�R�hp "DGap�*=J
E'D16�R�hp
|



