-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-16
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
空间光调制器(SLM.0001 v1.1) y`5��
�9�A 应用示例简述 FP`b>E qOH
J���T7nG.9 1. 系统说明 &|ex`nwc�0 光源 t]g�-CW��3 — 高斯光束 ,vawzq[oSy 组件 !cLo��>�,4 — 反射型空间光调制器组件及后续的2f系统 KV�aiugQ�� 探测器 vjCu4+w($Z — 视觉感知的仿真 ���^�4hO�� — 电磁场分布 "�5!oi]@>( — 效率、SNR,一致性偏差,杂散光评估 7�~�p@0)'' 建模/设计 CL;}IBd a� — 基于迭代傅里叶变换算法(IFTA)设计位相传递函数,将高斯光束整形为高帽光束 uEP�*iPLD@ — 场追迹:光在空间光调制器像素阵列的衍射。 Tc:)-
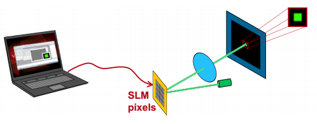
z[o� m�h�#a#��< 2. 系统图示 mb3�"U"ohs ��c� )g\�/ 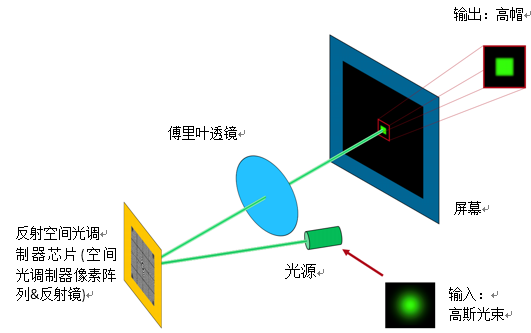 7#a-u<HF"� 7#a-u<HF"�
70nq�D>M�4 VirtualLab内置的工具,如: 5�yo%�$i8I 迭代傅里叶变换算法(IFTA) P��=Jo+�4O 一个辅助会话编辑窗口 ��n�\'��4� 经典场追迹仿真引擎,提供多样化选项以最合适的方法来处理衍射效应。 �]
vsz,
0 �At>DjKx]O 我们可以: [���5b--O� iB�yf{�I>+ 1. 为反射空间光调制器(SLM)生成一个优化后的位相调制分布设计 Y�(�'��#jU 2. 在最终系统的设置中对仿真结果进行分析。 50wu�lGJud rfg'�G&A( 应用示例详细内容 !hy-L_w�L] 系统参数 _Y�4` xv0/
�pa3{8x{9m 1. 内容概览 <�2x^slx)? 首先在系统详述中给出了仿真参数、常规系统以及评估结果。 n��'Lr��QU 接下来通过一步一步的描述来帮助你了解如何设置此系统。 *#|&JI�Esi 最后的部分给你必要的信息,即到处必要的设计核分析数据以用于实际的SLM模块。 ���KY�I�/ �o[w:1q��7 2. 应用实例的内容 H�M1Fz�\Sf ~jk|4`I?T� p)�-^;=<B3 3. 设计&仿真任务 m�dg�8�,�n (�)?(I?I�I 4l'fCZhA}�
对于2F系统和一个给定的SLM,我们设计了所需的位相用于生成一个矩形高帽光束(超级高斯)光分布。 �f~R(D0�@�
SLM偏折光线以在远场生成高帽形状光束,傅里叶透镜将光束聚焦,并决定了最终的工作距离。 2MIi=c:oqK
G�j?t_Zln� 7Q9 �w?y~c 4. 参数:输入激光束 MK��k\
�u9 P�3=G1=47U 文件: SLM.0001_TopHat_SLM-Design_1_InputField.ca2 -@2iaQ(5a2 |���SSSH�
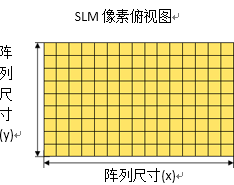
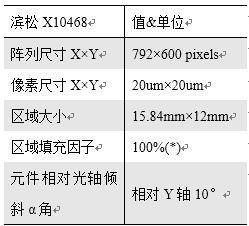
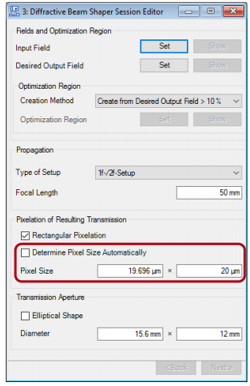
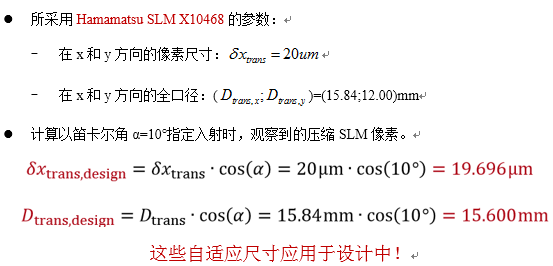
5. 参数:2f系统&期望输出光束 d&�Zpkbh" lfgq��=8�d 文件: SLM.0001_TopHat_SLM -Design_2_OutputField.ca2 gZXi�]��m& ��8kIk�s�y GL}]�y �-f 6. 参数:设计条件 ���3;9��^� 一般DOE vs SLM设计 O�8�r|8]�o 对于结构置于基底材料的衍射光学元件,像素尺寸在x和y方向可以自由选择。对于SLM应用, 这些尺寸都是基于SLM的像素尺寸而固定的。 ^uc�=f2=>, 反射系统 R)� h�#Vc( 在反射SLM系统中,其SLM是倾斜的,入射光仅可以“看见”倾斜的SLM像素区域。因为设计和优化算法都是假设光线垂直入射,因此,传输函数的像素尺寸必须适应设计。 SKN`2�[ahD
��[|�$h*YK 7. 参数:SLM像素阵列=传输 _N cR)�2�� R�bnV��L$c
 fT���e��c fT���e��c
jB2�[��(�
nR�~@�#P\�
在该设计中,忽略了SLM像素间隔。 ;i�g�IZ$�&
如在SLM.0001中,我们假设一个区域填充因子为100%。 h�(�dvZ=
%
F/���{!tx
 %[�TR^Th6� %[�TR^Th6�
5C�]�x!>kX
(*)实际上Hamamatsu X10468的区域填充因子为98%。其效应将如SLM.0002标题所述。 0#hlsfc]�\ 8. 设计的压缩长度 !f�[�_�+CD
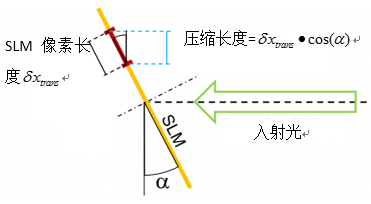
�q?yVR3�]M 由于反射系统相对于Y轴有一个倾斜角度,垂直的入射光,以压缩视图的方式看SLM的X方向的长度。 /{_�:{G!Q0 hn@�0�8t G
 "�(O>=F&� "�(O>=F&�
/,yd+�wcW# 对于本设计—采用正入射考虑的迭代傅里叶变换算法—通过将SLM的X方向长度及其像素尺寸分别乘以因子 以顾及到倾斜角度的影响: Dz/ "�M��= �7n�<��{tM
 �J/$&�NW�F &p@O��_0nF 9. 辅助设计&优化 ZLej�cY�S� �J/$&�NW�F &p@O��_0nF 9. 辅助设计&优化 ZLej�cY�S�
�#c�!lS<�z
0�3Y�cf'W�
VirtualLab提供了一个会话编辑器用于光束整形中协助用户配置设计和优化文件。 d7upz]K9�g
其更多地用于经典衍射光学元件(DOE)的设计,因为其像素尺寸是变量,具体的大小将在设计过程中定义。 CH�X�#^0m.
对于一个SLM系统,元件的像素尺寸是一个固定参数,因此必须在会话编辑器中手动指定。 /([���kh~a
 n�-�;`Cy`k n�-�;`Cy`k
文件:SLM.0001_TopHat_SLM -Design_3_DesignDoc.ca2 k4���J+J.|
��N4!O.POP
10. 设计结果:位相传递函数 _`T_�">9�r ���
�=:pJ 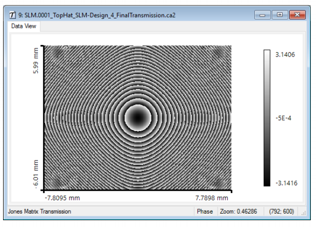 6cX���yJW 6cX���yJW
相邻的位相分布结果以2π模显示。 a1lh�-2x�X q<1��~ vA9 文件:SLM.0001_TopHat_SLMDesign_4_DesignedTransmission.ca2 ��NXrlk��
V)25$aKW7� 应用示例详细内容 )ez9"# MH' a`>B �Ly5o
仿真&结果 0GeT�S��Fj
rV#ch��(�� 1. 设计结果:评价函数&输出 o�nzxx4bax
3s�#N2X;Bc 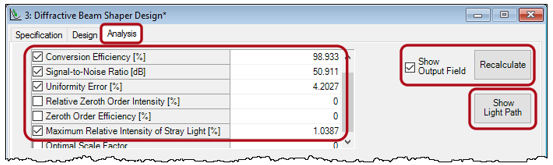 ;�e�*!S}C, ;�e�*!S}C,
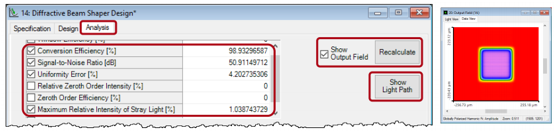
D�p9+HA9�t 设计结果的特征参数可在分析标签页内进行计算。输出场(振幅)以伪彩色(彩虹)表示。 �q�/�,�O\, 点击显示光路图 打开系统的光路图文件(LPD)。 ��=��7eV/3 O\�r0�bUPE 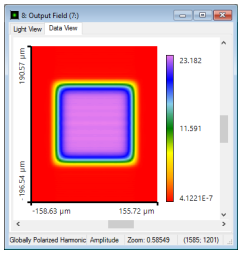 ��z
Iu'[U ��z
Iu'[U
�S,he6z��S 2. 在倾斜系统仿真前的设置1-2 x�y;;zO�h`
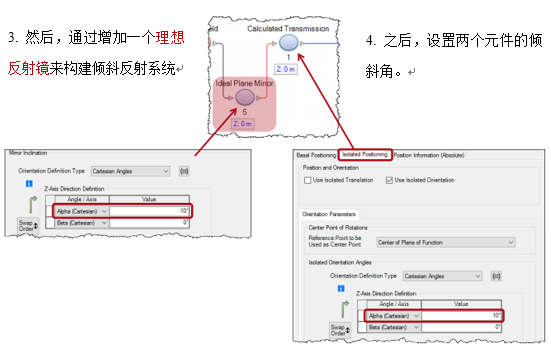
4�V`G,W4^J 设计好的位相数据已经自动地插入到打开的LPD中。对于一个反射SLM系统必须做出一些调整: �[4f{w%~^�
���b>y�Sv 1. 设计的传输的采样距离必须根据实际SLM参数进行设置,因为倾斜元件一定会有其原始像素尺寸。 ` ��Sz}`+E
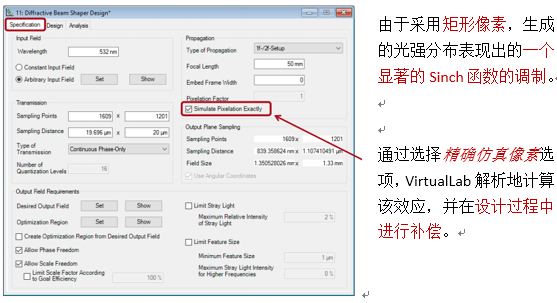
Gd85�kY@w7 2. 此外,VirtualLab允许考虑矩形像素形状引起的光学效应因素。 Q~Wqy~tS�� Nz�vXN1_%�
 tR$NR�M�Z. tR$NR�M�Z.
]/L�0,^R�I 3. 在倾斜系统仿真前的设置3-4 6'f�;��-�2
Q�$�"D]!�G
 K��}Q�a�~_ `ERz\`d~Y; 4. 在倾斜系统仿真前的设置5 ]Y&�VT�7+Z K��}Q�a�~_ `ERz\`d~Y; 4. 在倾斜系统仿真前的设置5 ]Y&�VT�7+Z
<a3���WK�w
 eHU�OU>&P] (tW`=�]z-< 5. 因为理想系统元件并不适用离轴非傍轴的仿真,所以必须进行调整,通过: �>m\(6x8RE 或者使用为了考虑相应的像差在稍后所用的透镜 (详见SLM.0003)。 p�!%pP}I�� 或者—如此处描述的—通过2f系统元件,应用一个无像差的傅里叶透镜。 h<Q�Y5=S�F xAm6B�B
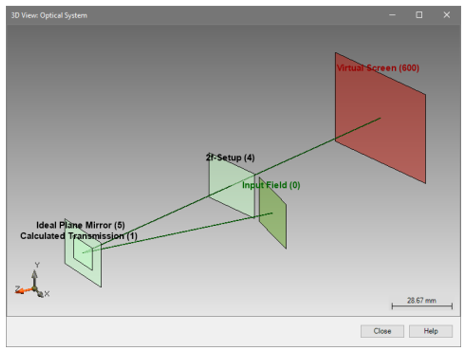
c� 所用文件: SLM.0001_TopHat_SLM -Design_5_FinalReflectiveSetup.lpd C3g�_!�dUs Nh�+��H��9 6. 系统的3维显示 �dM@1l1h/� 4*�;�MJ�[| eHU�OU>&P] (tW`=�]z-< 5. 因为理想系统元件并不适用离轴非傍轴的仿真,所以必须进行调整,通过: �>m\(6x8RE 或者使用为了考虑相应的像差在稍后所用的透镜 (详见SLM.0003)。 p�!%pP}I�� 或者—如此处描述的—通过2f系统元件,应用一个无像差的傅里叶透镜。 h<Q�Y5=S�F xAm6B�B
c� 所用文件: SLM.0001_TopHat_SLM -Design_5_FinalReflectiveSetup.lpd C3g�_!�dUs Nh�+��H��9 6. 系统的3维显示 �dM@1l1h/� 4*�;�MJ�[|
 WcGS�9�`m/ WcGS�9�`m/
{'��H(g[k� 为了方便演示,在不同的元件中引入了一个额外的距离来说明系统配置。这在仿真中并非必要。(2f系统已考虑了前后的传播距离) {)<v�&'*c~
OY({.uV�dX 7. 更高sinc级次评估 ?a]mD�x>xh �#/37V2�E 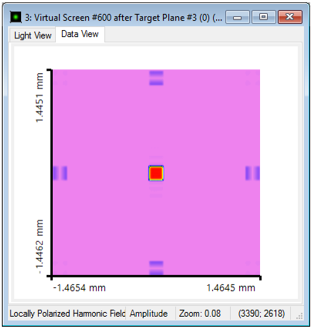 H�\[W/"��� H�\[W/"���
�qH_Dc=~la
�\i�&<�s;�
能够通过几个数据点模拟每个SLM的像素,从而考虑周期结构引起衍射效应。 �T�l�r v={
由于每一个像素的矩形结构,产生的衍射级次以一个sinc函数(所谓的高级sinc级次)进行调制。 ,�a?
o�aPH
这强度调制会影响一致性误差值,在IFTA设计过程中可以补偿这一效应。 )+Pu�s~�w�
�\~�wMf�P8 8. 系统的仿真结果 �<1!�O�1ab
GC�'O��[q+ 文件: SLM.0001_TopHat_SLM-Design_5_FinalReflectiveSetup.lpd �Y_P!�B^z3
hi[pV�k~B) 9. 总结 j] [�,J49L
dA�j$1�K�e VirtualLab内置的工具,如: }Y��4���qS 迭代傅里叶变换算法(IFTA) ?a��M�OZn? 一个辅助会话编辑窗口。 lu/
(��4ED ��&%Tj/�Qx
经典场追迹仿真引擎,提供多样化选项以使用最合适的方法处理衍射效应。 hE-M$Lm�N@
w�4Z'K&�d=
我们已经: R�D�&PDXT4
C7�AUsYM��
 �4B][S�'f� �4B][S�'f�
wz8yD��8�M
1. 为反射空间光调制器(SLM)生成一个优化后的位相调制分布设计 FVBYo%�A�p
2. 在最终系统的设置中对仿真结果进行分析。 �fF�� �kj+
�(7*}-Uy[C
分步操作说明 U�
m+8"��W
�<a�+Z�;>�
通用方法用于设置一个SLM系统并完成设计,优化和分析 j�z0T_\8D`
0m ? )ROaJ
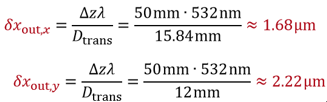
1. 设计及分析过程 ���E_LN�]v
zx7{U8*�`<
 m�l$o5�&sN m�l$o5�&sN
�T[A�69O]v
2. D1:给定因子—根据SLM的几何尺寸 �Rlirs-�WQ
rVs��J�`+L
�jZ;
=so�
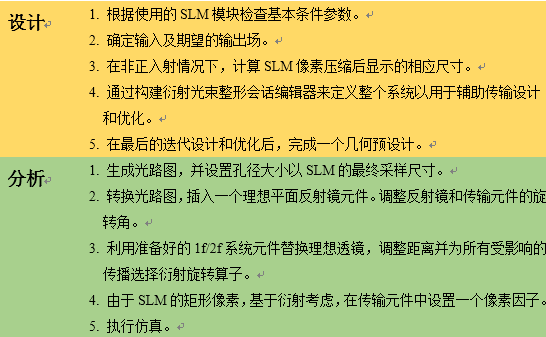
由于SLM像素的固定尺寸,结果输出场的最大延展是确定的。利用公式可计算该延展。 "�zy7C*)>r
通过VirtualLab的衍射光束形状会话编辑器可以自动进行压缩。 gZ�1?�G-Q�
SLM的整体尺寸也是固定的。因此可直接获得的输出场分辨率并可通过第二个公式进行计算。 @=kSo
-S�X
��)�dSi��/
 H>@+om��� H>@+om���
 n(]-�y@X0_ n(]-�y@X0_
u�W3�!Yg@
3. D1:可实现输出场参数 7��x����a>
RpYERA��gT
考虑给定的SLM sp�`Dv�qx0
S21,�VpW\�
总输出场尺寸: X\�F�|Tk3_
*�uvQ\�.��
 \nq��S+on] \nq��S+on]
t&DEb_"De�
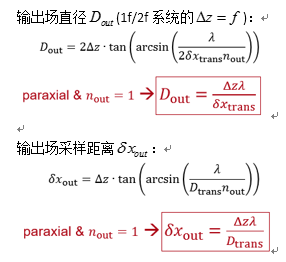
在目标平面上沿x和y方向可获得分辨率: WMg~Y�"W�
�&�
�ZB���
 ;j�TN�| i' ;j�TN�| i'
W*w3�[_"sr
4. D2:输入场 >-�{�Hy�x�
@xZR9Z�8]L
 /H+a�0`�/� /H+a�0`�/�
PnG�-h~Y3N
61
~�upQaR
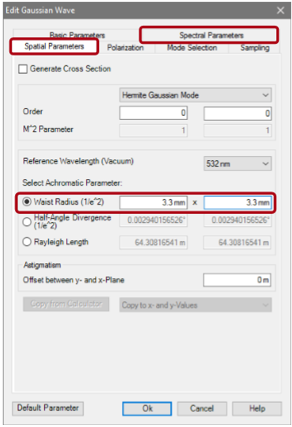
可使用VirtualLab的光源模型生成入射场。 wH��6aAV~1
我们从光源工作区中使用高斯光波模型生成指定入射的激光光束分布 jlg�(�drTo
- 在光谱标签下指定波长 $u6
3]rypm
- 在空间参数标签下指定1/e2束腰半径 4nz��35BLr
@ur+;�IK�$
5. D2:输出场 6\S~P/PkE�
ua� `�RJ�
7T'B6`-Ox�
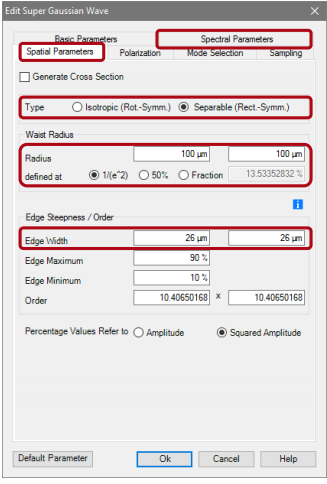
可使用VirtualLab的光源模型生成输出场。 3D�G_QVg^v
我们从光源工作区中使用超高斯模型定义期望的目标光场分布 /�|#fej�Ph
- 在光谱标签下指定波长 S#[�j )U-�
- 在空间参数标签下指定: 5n�Vt[P�uw
可分离(Rect.-Symm) /JU.?�M35
1/e2束腰半径 K��'I#W
lg
边缘宽度(应大于无光束整形元件光学系统生成的单目标光斑半径) �8sK9G`
�k
-n5)w*�b�,
 HLHz�2�-lI HLHz�2�-lI
$xd����y�&
6. D3:入射角 �_t}WsEQ+P
�rk�)`\=No
 Jqi%|,/]�N Jqi%|,/]�N
[���;sRV<
这些自适应尺寸应用于设计中! �t�<?�,F�
@!d{bQd��,
7. 用于IFTA设计操作的系统概览 7 x?�<*T��
m<2M�4�u �
!��_���Z&a
8. D4:配置会话编辑器 5.J�.�RE"M
-;k+Gr�Lr^
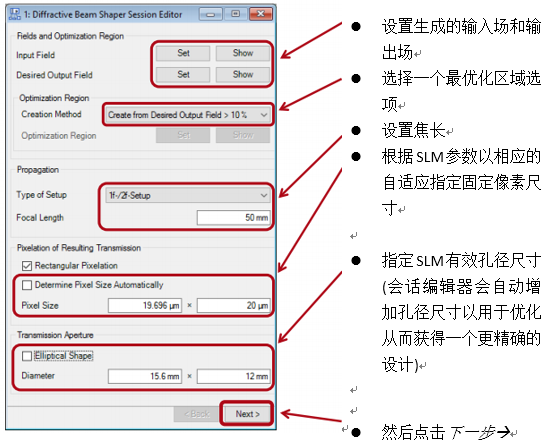 �2T[9f;jM' �2T[9f;jM'
�t5IEQ2���
9. D4:通过参数概览进行检查 S�O��vF[,+
Yp2e�Bgo"�
 Nu~lsWyRI5 Nu~lsWyRI5
�0Z]!/�AsC
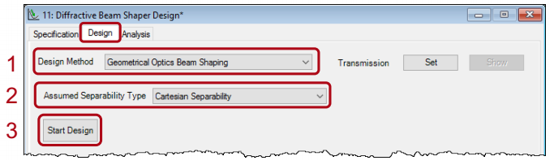
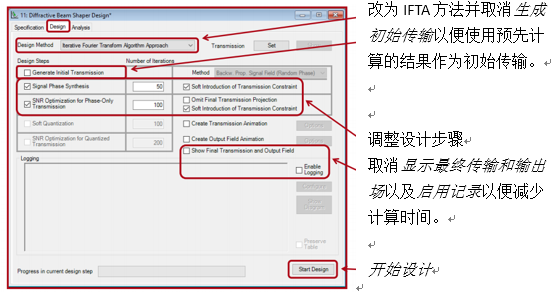
10. D5:几何预设计 VTHH&$ZNq�
]L}dz�A?:�
1. 为迭代傅里叶变换算法(IFTA)获得一个好的起始点,执行基于几何光学光束整形的预设计。 @�2v_pJ�y^
2. 选择笛卡儿可分性以生成一个矩形目标图案。 4]}'�Hln*U
3. 开始初始设计 �yyy|Pw4:Z
Hl
|z</*+�
 i8H�Tzv"J� i8H�Tzv"J�
('�p��5:d�
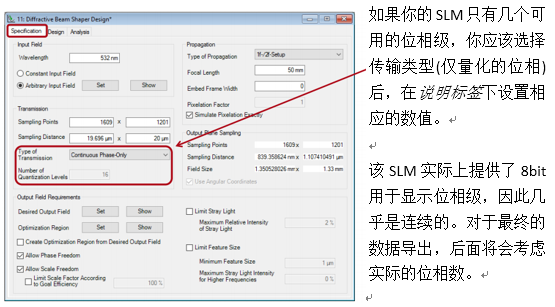
11. D5:IFTA-相位级次数 }?v )N).kW
 LC!bI�m5'� LC!bI�m5'�
0N��X�,QD
12. D5:IFTA—补偿Sinc调制 ��_``=cc��
���J`1��rJ
 D*��|Bb?� D*��|Bb?�
x.R��4%��Z
13. D5:IFTA—设计设置 K8Y=S1�2Ti
�\�mlqO[ S
 R]*K�:~�DM R]*K�:~�DM
OY@ %p}�l�
14. IFTA预分析 P\)�iZiGc
ijx�0g�h`~
 (7=�9++u�U (7=�9++u�U
n#_$\
p>Yd
在完成设计过程,在分析标签对设计结果进行概览。 Vj>8a)"B5a
可以显示输出场。如伪(彩虹)彩色。 %sQ^.�` 2
由于IFTA在光束整形器设计中使用更大的场进行计算来制合适的位相值(因此会有更高的采样),使IFTA的分析结果与后续整个系统的仿真结果略有出入。 "AGLVp.zT
�]
{HI?V�
15. A1:获得整个系统—LPD X�ACm�[NY_
K0Fh%Y4)QH
 k7u�sMVA�A k7u�sMVA�A
\d$!a5�LF}
在最初,IFTA总是输出一个轴向传输系统。 _b��;�{�_g
因此,我们将稍微的修改此系统以用于后续实际几何结构的最终仿真。 /��FEVmH?
首先,我们进行设计位相传输数据的最后准备。 a�PbE;"
f
KRDm��Y��+
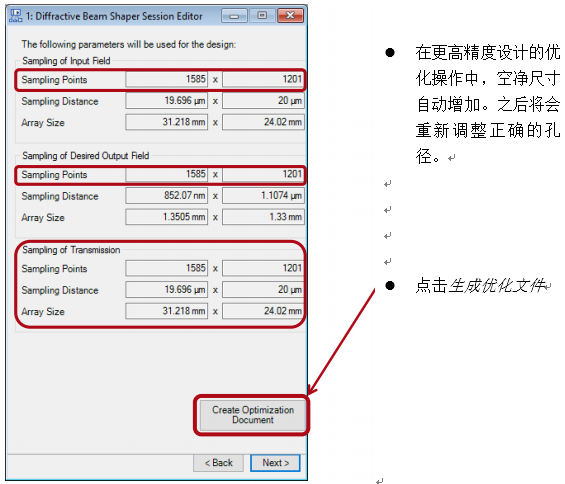
16. A1:应用SLM孔径 G�{%L��B}2
0F�><P?5��
现在,我们需要提取对应与实际SLM像素数的透射区域。 Bh]��P{�H%
如果在衍射光束整形器会话编辑器窗口中点击下一步,该提取将会自动完成。 V�[�v�l!XM
然后点击提取 可以获得包含指定孔径的设计的透射函数。 SQt�4�v�"�
,]c
1A$Sr0
17. A1:调整采样距离 '}b�g��Lv
e(=w(;�84�
重新调整X方向的采样距离,这仅在IFTA设计中需要。(在整个系统中,SLM有其原有的采样尺寸和预期的倾斜角度。) xAM�W-eF?d
�C#�I�y�bg
可通属性浏览器的数据标签下完成采样间距的重新调整。 c.�F6~IHu7
如果整个系统已经依据轴上系统设计(透射式或者反射式光束分束),该操作则没有必要。 �Pc��e;r*9
�$a�X�er:
M}�v�/�tRI
>]5P
3\AQV
18. A1:交换透过率函数 d���T���1H
��F;0}x;:>
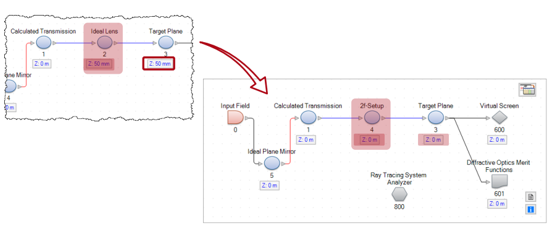
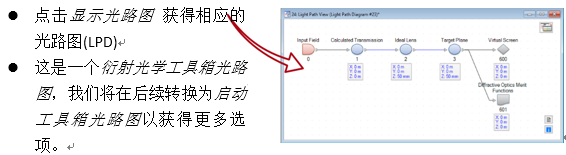
19. A2:转换到基本工具箱LPD ?o#%�X���s
�IG�9VdDj
点击衍射光学工具箱光路图的光路编辑器中工具按钮,然后点击转换为基本工具箱光路图。 �%UCr;�H/�
通过此步骤,你可以获得完全的光学元件选择树状列表以在光路图中插入元件。 )iK6:�s��#
�L�.0�mk_&
A#'8X���w|
20. A2:调整实际系统的几何结构 �,>+p-M8ZL
Q9�G;V]./�
�*w��0�%d1
21. A3 :设置2f系统 GD_hh�Dy�D
,0HRAmG�
��!6Mo]xh�
由于理想透镜元件不适用于离轴非傍轴模拟,因此必须使用下列之一进行更换: +��l�{�=��
为了考虑相应的像差在后面的所用的透镜。 6]%s���Fy2
如此处所演示—通过一个2f元件,即实现一个完美无像差的傅里叶透镜。 �Jd^,��]��
如,该2f系统元件可以完美地将斜光束聚焦到预期位置的平面显示屏上,以补偿非傍轴。编辑对话框中的参数设置已经考虑了元件前后的传播距离。 .O����}%��
�-"60d
@.�
文件: SLM.0001_TopHat_SLM-Design_5_FinalReflectiveSetup.lpd h
�Pa_Vr�H
:mn>0j�K,N
22. A3 :选择旋转算子 tQYM�&6�g
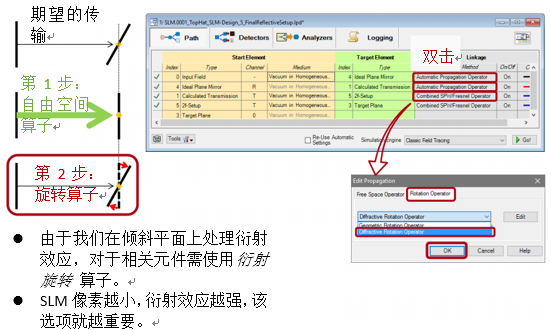 6h�,(wo3Y� 6h�,(wo3Y�
23. A4 :模拟像素化透射函数 !.(P~j��][
在默认设置下,VirtualLab通过单个数据点(仿真像素)仿真每一个设计的透过像素。 /9�p�wZ%:<
若考虑每一矩形转换像素的效应,需要用更多的数据点来描述像素。 �@>>~CZ`l
根据引入的像素因子,我们以3×3数据点仿真每个转换像素区域。 !�Af�H�k�|
此时,我们没考虑SLM像素间隔。这可以被视为一个特殊的组件,将在SLM.0002中会介绍。 Z+. �'>�
上述考虑将会增加计算时间以及输出场尺寸。 oij}'|/J�c
�q6�`�b26�
TXvI4"���&
24. A5 :完整系统的仿真 �9=h'9W�o�
@Y<b�wv���
�1--C~IjJ+
操作&重点关注反射 |My4�SoO�F
8�=uu8-l8g
不同几何结构,屏幕&加工 L4z ~B!uvF
考虑反射 �aa#Y=�%^�
关于期望设置的几何结构,当设计这样一个光束整形元件时,用户需要考虑如下问题: ��W~9tKT4�
结构应放在元件的哪一边。 �RM]M@�%,K
系统是透射式还是反射式。 K<ft2anY5�
目标图案是在透射屏上观察研究还是在不透明屏幕上。 "x*e�gI��
如何进一步使用数据(制造商/SLM输入)(需要什么样的坐标系统)。 ]cZ!y�
~
�jun_QiU:2
因此,用户可能需要: ji�S_�G%G�
以镜像图案设计和/或 ^c4@(�]v'G
采用一个z方向缩放为-1(翻转)或一个x方向缩放为-1(反射)的结构以避免镜像效应。VirtualLab为这种情况提供了所有必要的工具。 W��R�y�aKM
_��ff`y���
对于提出的用于SLM系统的点对称图案,无需特别注意的事项。 z(P�e,�zES
yvH�A7eq*"
SLM应用的数据输出 se>�8�Z4�
1. Bitmap导出 7�k9G(i[-+
设计之后,传输数据需要转移到SLM。一般的方法是将数据转换为bitmap(BMP)格式,并通过图形/显示驱动来启动SLM。 Rc�M/!,B�
可通过以下步骤完成这样的BMP输出: :xv!N*�L�e
1. 如果在IFTA设计中引入量化等级,则可根据SLM的识别等级数完成操作 (�b�~T]3Es
2. 与导入的SLM位相修正文件相乘(如果SLM制造商提供了这样的文件) n;��+�LH�9
3. 移动位相到实部 au+kN�F|�Q
4. 提取正值 ��d�q&yf7�
5. 归一化最大值为1 -��Rd/G��x
6. 以可识别等级数目分别乘以实部。如255(0255) ��6S*e��xw
7. 输出BMP(文件>输出)-即实部以灰度0到可识别SLM等级数 IsM}��'��.
2. 导出:1.引入量化等级 �F{J�w�^\�
可在设计过程中或设计完成后进行量化。 TKY*�`?�ct
1. 在IFTA设计&优化过程中引入等距等级(如位相)会增加计算时间。 �{/(D$"j(S
但是对于少量的量化等级,可以使用该操作,因为处理过程通过智能计算(软件自带)会流畅地完成。 D=m9�f�F�z
2. 如果SLM可识别大量的级次(也就是近乎连续,如200),那么在后续可以应用强行量化,因为通过界面几乎无法改变透射,因此几乎不改变优化函数值。 X�=!^] 3zH
通过 操作(Manipulation)>量化(Quantization)>强行量化(Hard Quantization)完成。 &d+Kg�0��:
3. 导出:2.SLM位相校正 v99B7�VH�4
一般SLM并不是完全平的,因此一些制造商提供了一个特定的位相校正函数,应与设计的透射函数相乘。 3z�)Kz*�xr
导入校正函数,并将其与计算的透射函数相乘,使用键盘上的“*”按钮,或者通过 操作(Manipulation)>阵列(Array)-阵列操作(Array Operations)>相乘(Multiplication) �dWUm\�t'#
关于VirtualLab数据导入的更多细节查找案例337.01 。 )��ufg9"\
4. 导出:3.位相到实部 Mg��OR2,cR
移动位相到实部可通过: q[`]D7W�
"
操作(Manipulation)>场量操作(Field Quantity Operation)>移动(Move):位相到实部 �+HeTtFo{M
l(u.I2��^o
Q��nXA*6DJ
5. 导出:4.提取正值 -o[x2u~n\
通过 操作(Manipulation)>振幅(Amplitude)/实部操作(Real Part Manipulations>提取正值(Lift Positive)
;"f�DUY�|
t2���"��O�
6. 导出:5.归一化 q�<�[�_�T�
通过 操作(Manipulation)>振幅(Amplitude)/实部操作(Real Part Manipulation)>归一化(Normalize) %?u�c><&?e
0�Lc9�M-Lg
7. 导出:6.调整最大值 &7b|4a8�B%
通过 操作(Manipulation)>常量操作(Operation with Constant)>乘以常量(Multiply Constant) �ZP�*q4�:
jR2��2t`4�
8. 导出:7.BMP导出 Q�}K#'�O�g
通过文件(File)菜单>导出(Export)>导出(Export)为图像 �5b/|�!{
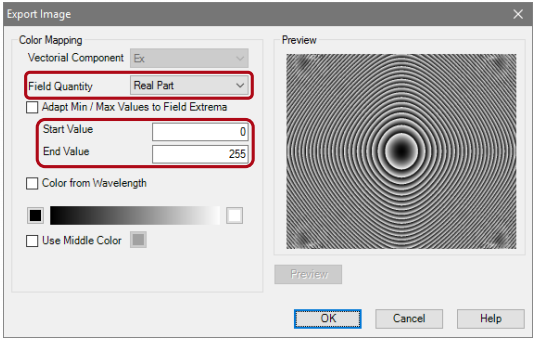 ���8a=�"/J ���8a=�"/J
在导出对话框中将文件格式改为.BMP。 P�8>d6;o($
现在bitmap 数据可以调入到SLM模块! YN2sd����G
扩展阅读 e2ilB)��,
O-�cbX/��d
扩展阅读 :x{NBv�UIc
l 开始视频 F\A��X��:�
- 光路图介绍 ��#qI= Z0Y
- 参数运行介绍 2H6�,'JK@F
- 参数优化介绍 Q/�I�!�}C4
l 该应用示例相关文件: J�d�(,��/q
- 案例337: 导入数据阵列介绍 �#u"k~La��
- SLM.0002:一个SLM的像素处光衍射的仿真 m&\h4$[kql
- SLM.0003: 一个基于光束整形系统的SLM中透镜像差的研究 2v�iM)+��
|



