2022 年 12 月,发布 VirtualLab Fusion 2023.1 �8�Q�"1I7U VirtualLab Fusion 2023新版本更新内容(三) 'v���Y�t_T 2023.1版本新特性一览
sCmN|�Q�� wC�V~9JTJ! 基本信息 a]Y��9;��(
}:�u�-l3e
 B&B�L<�X
r
B&B�L<�X
r  r�g��=Y�m.
r�g��=Y�m. VirtualLab Fusion 2023.1新版本
主要更新方向 ]vPd��j"7�
 ��)]LP8
J&
��)]LP8
J&
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 "c�?3�1$6
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: ks
�%arm&�
- 更快的速度 1*'ga��a&y
- 更容易使用 M ac?H��I
- 融合更多物理光学模型 Ed�{sC�[j=
- 更高的透明度 [Q\(k�d�*4
- 多元的仿真控制选择 "zz�b`T[8�
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 a#x@�e?GvI
,��r�F!o_7
=fdW ��H4�
功能概述(以下为更新内容的详细解释和案例展示): }f% Qk0�^
数据视图 �C�J�w�zjH
a;nY�R�5�f VLF 2023.1数据视图 cM4{� e�^� +�(z[8B�Jl 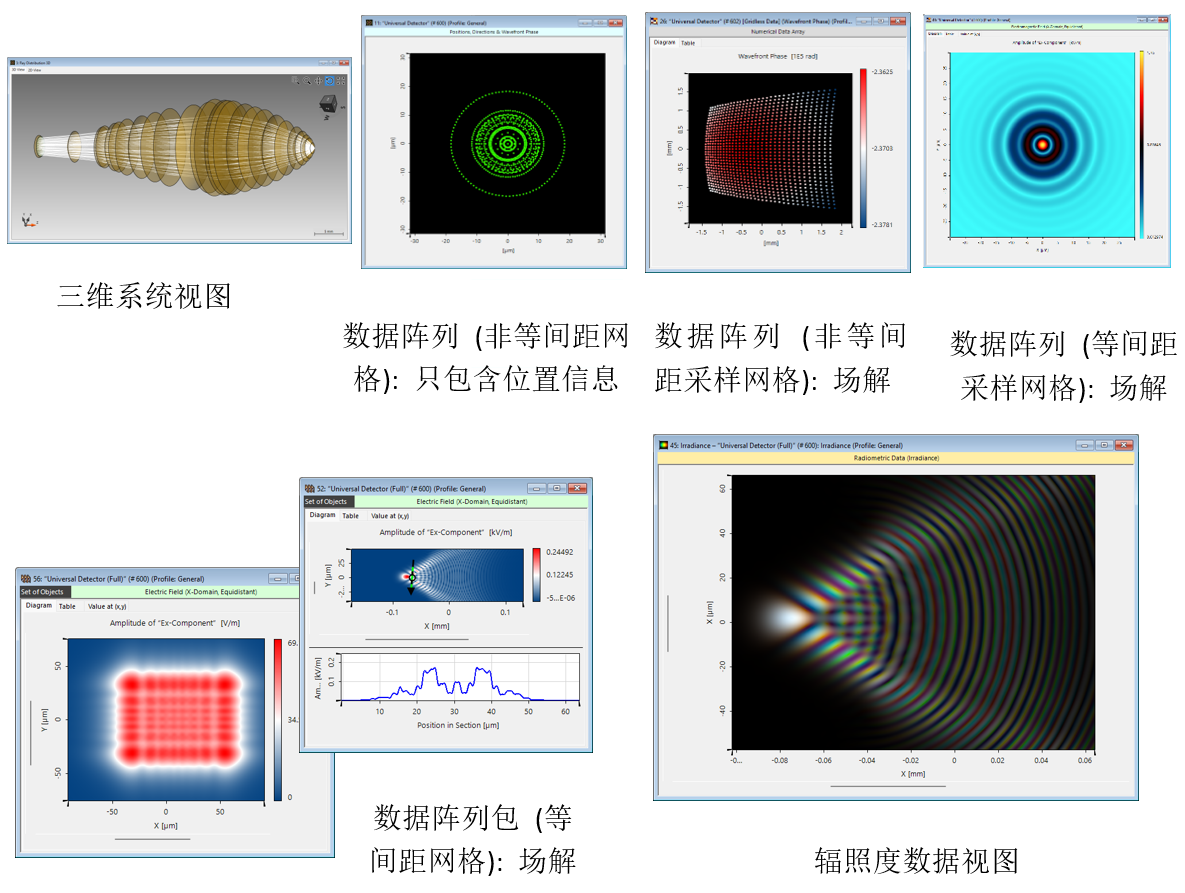 U!K��#g_}� �0I �do_�V VirtualLab Fusion 2023.1数据查看方式 rW_c�Ldh]#
U!K��#g_}� �0I �do_�V VirtualLab Fusion 2023.1数据查看方式 rW_c�Ldh]#
NS �TO\36�
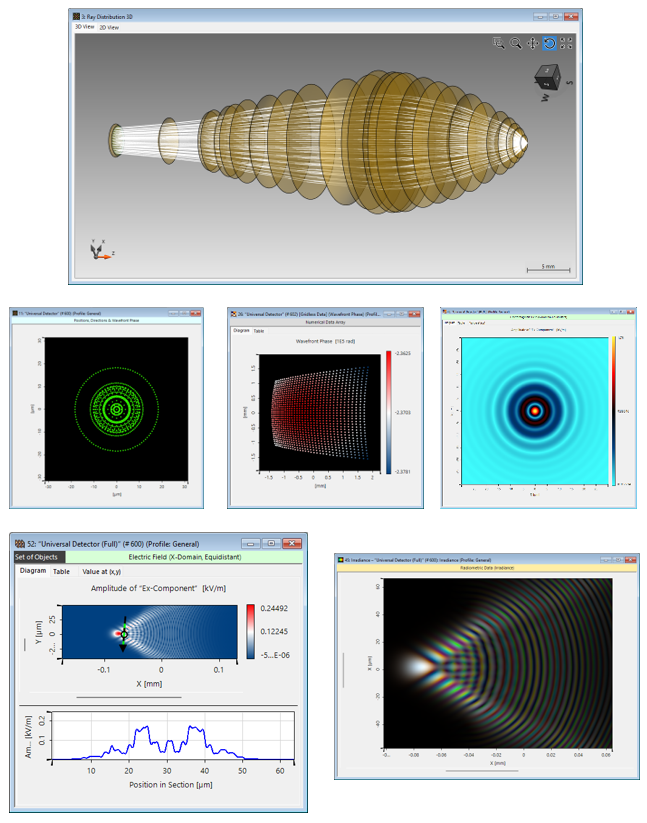 rusYNb1��J tA'5�ufj*: 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 #XqiXM~�^R 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �P"t� Dq�& 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ,^� d�pn�� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 ��iP:^nt�? 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 ^gNbcWc7CU
rusYNb1��J tA'5�ufj*: 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 #XqiXM~�^R 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �P"t� Dq�& 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ,^� d�pn�� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 ��iP:^nt�? 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 ^gNbcWc7CU
�0>e�]i[P.
ZP&i��y$<L
三维系统视图: 新的对话框以及设置选项 q��SD3]Dv"
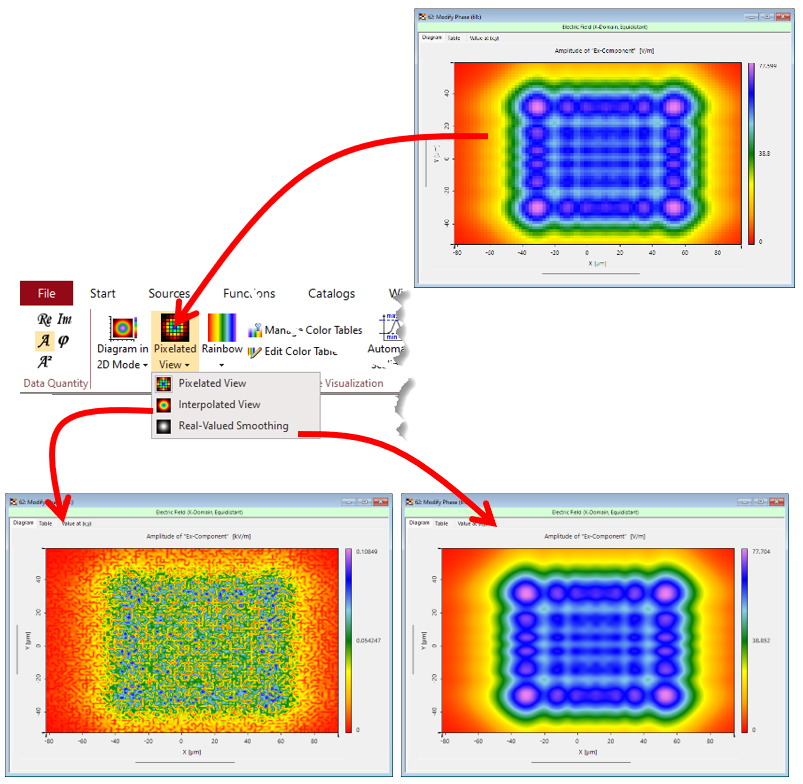
��+qq�C��k 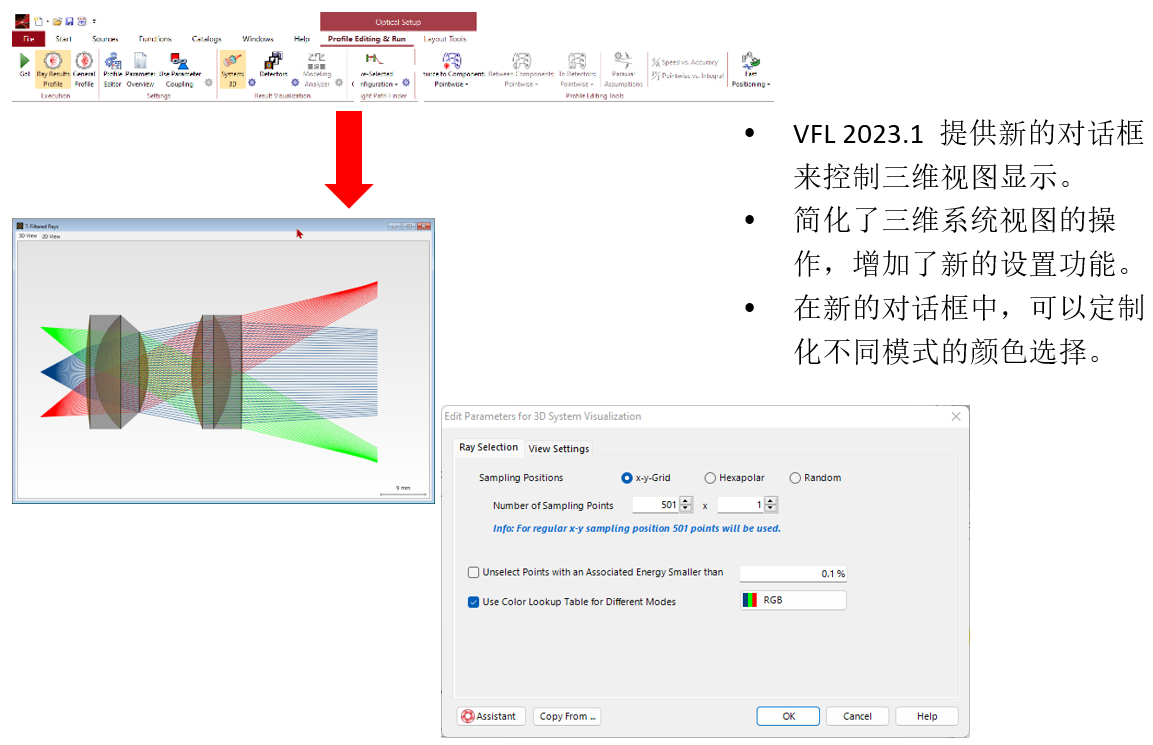 HCe/!2Y/�% �V�`YmG�o� 数据阵列视图: 像素数据(Pixelated Data)平滑 �=^l`c$G�<
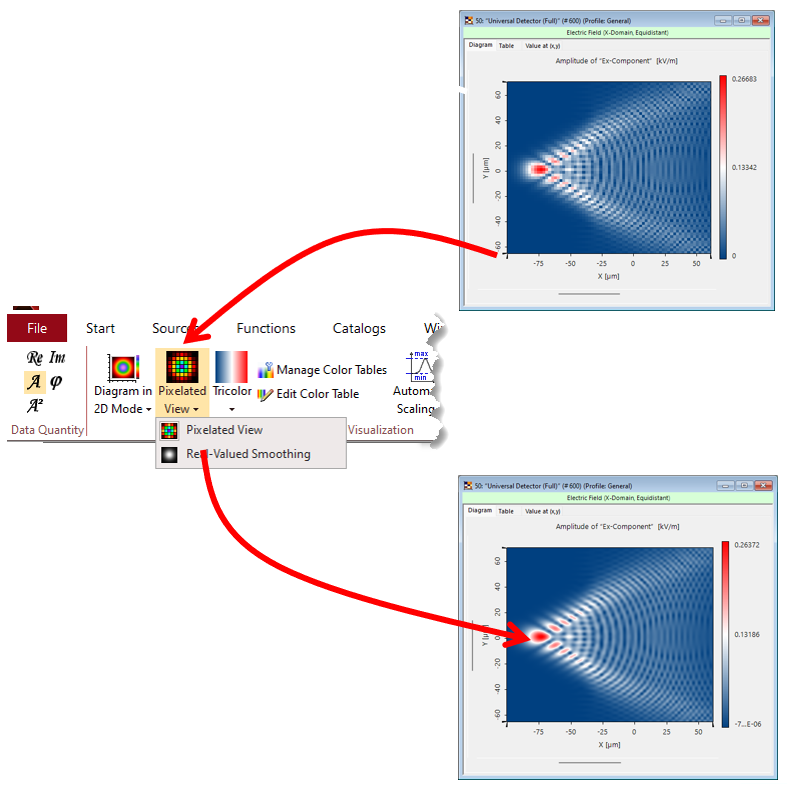
�bk�i�:u • 探测器中的像素越少,探测器评估速度更快。 �U�!RIe�C� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 :�<0lC��j� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 8493O x4 O 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �5LU7}v�~/
HCe/!2Y/�% �V�`YmG�o� 数据阵列视图: 像素数据(Pixelated Data)平滑 �=^l`c$G�<
�bk�i�:u • 探测器中的像素越少,探测器评估速度更快。 �U�!RIe�C� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 :�<0lC��j� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 8493O x4 O 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �5LU7}v�~/
k)y<iH�R_o
 #�S��jCKQ~
#�S��jCKQ~
]=�/�?Ooh
数据阵列视图: 像素数据(Pixelated Data)光滑化 PpN�G�`�_O
f�9Iq�cCSW
v���;}M�Hl
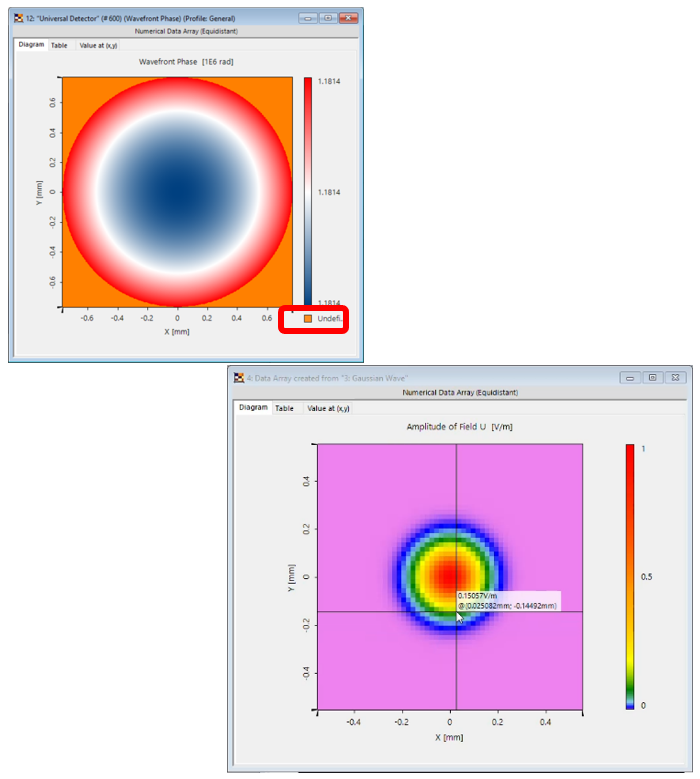
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 LcNI$g;}Yf
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 9���8�uM�D
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 U��7�,.��L
�3v��QVk��
 +>c%I&h}`�
+>c%I&h}`�
4<5*H�pW�
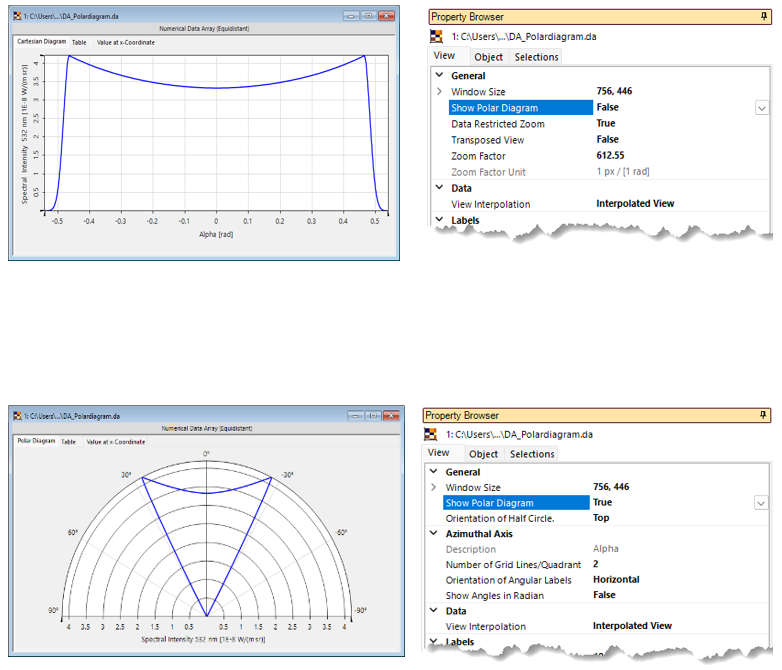
数据阵列视图: 极坐标图(Plolar Diagram) ���Yw�cgt|
}>3jHWxLc • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 r/0AM}[!*j • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 O@:R\MwFOZ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �[��i>�D|X • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 ec*�Ni|`Z'
C*t0`3�g
d
 e<~bD�F�H�
e<~bD�F�H�
XXD�4T9Wy
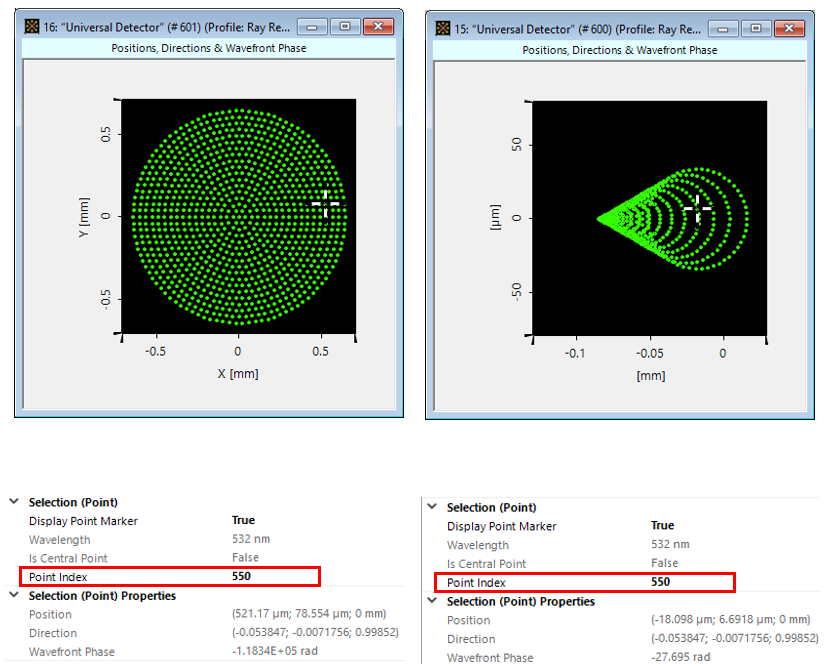
数据阵列视图:找寻以及点的标识 �Y
7?q�`�
"tD�B�[�?
��?f!�&�M
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 @B��?'M�u*
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 V~J����t�
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �0a�,�B&o1
��/IH�F�
 ZK<c(,o�Z^
ZK<c(,o�Z^
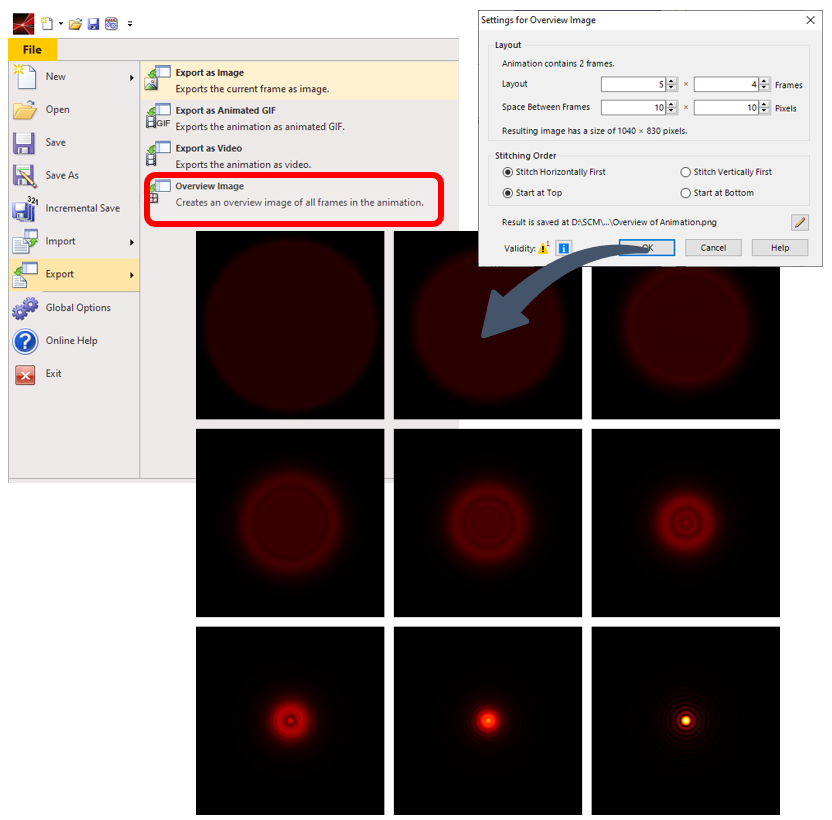
*��fLVzYpo 导出图像的概览 �-f?,%6(1 �gXY�]NW�I i|S/g�.r�
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �zP|^@Homk
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 j|�[��>f��
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 u���Oh�� (SA^��>��r
 �3,I�u�!KB
�3,I�u�!KB
`y�{[e �j
数据阵列视图: 更多的新功能 ]v+yeGIK�S
� :�*t5��?
UH((d*HX�4
• VFL2023.1可以对未定义区域填充不同的颜色。 �0])[\O`�j
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 Ma�F4l�FmS
wb�39s^n��
 5��d�-rF:#
5��d�-rF:#
�D&�DbxTi�
Graphics Add-ons提供更多数据视图选择 �s�dN1BV2� m<J:6��^H@ � �LY��yud
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 z��]�&�?}o
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 �t�"v��kd�
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 �P]�2V~I/X YU\�k �D�� 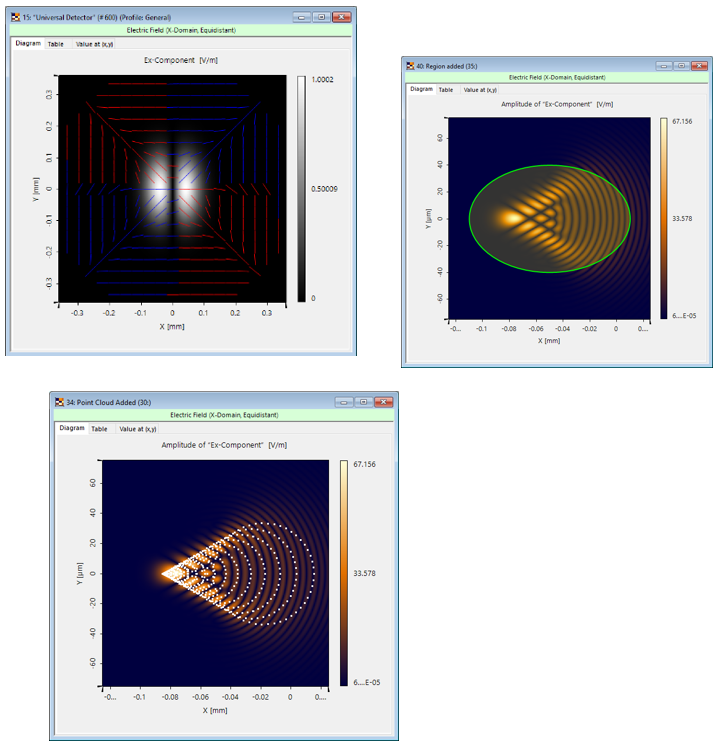 %Y9CZ�RY�9 4v9d&
m�!< }:��!X�@C~ Graphics Add-ons提供更多视图选择 ju1B._�4�8 X3?RwN:�P�
%Y9CZ�RY�9 4v9d&
m�!< }:��!X�@C~ Graphics Add-ons提供更多视图选择 ju1B._�4�8 X3?RwN:�P� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
r�yb81��.| • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
F!-�%v�5.y • 图像组件提供了多样化的配置选项。
LG?�?Q�+`l _n&#e��
�r 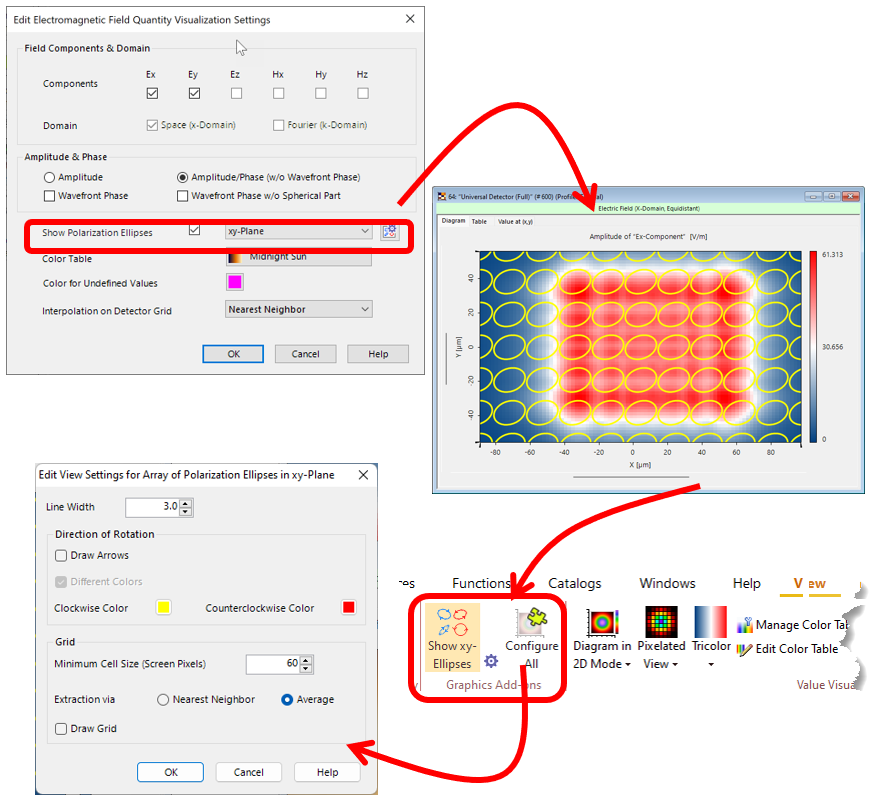 '�LR|DS[Ne }hcY5��E-n b�V�+2���U Graphics Add-ons: 增加了 Point cloud 功能 x�tK\-��[n �(�k_9<Yb3 RYd�I$�&]
'�LR|DS[Ne }hcY5��E-n b�V�+2���U Graphics Add-ons: 增加了 Point cloud 功能 x�tK\-��[n �(�k_9<Yb3 RYd�I$�&] • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
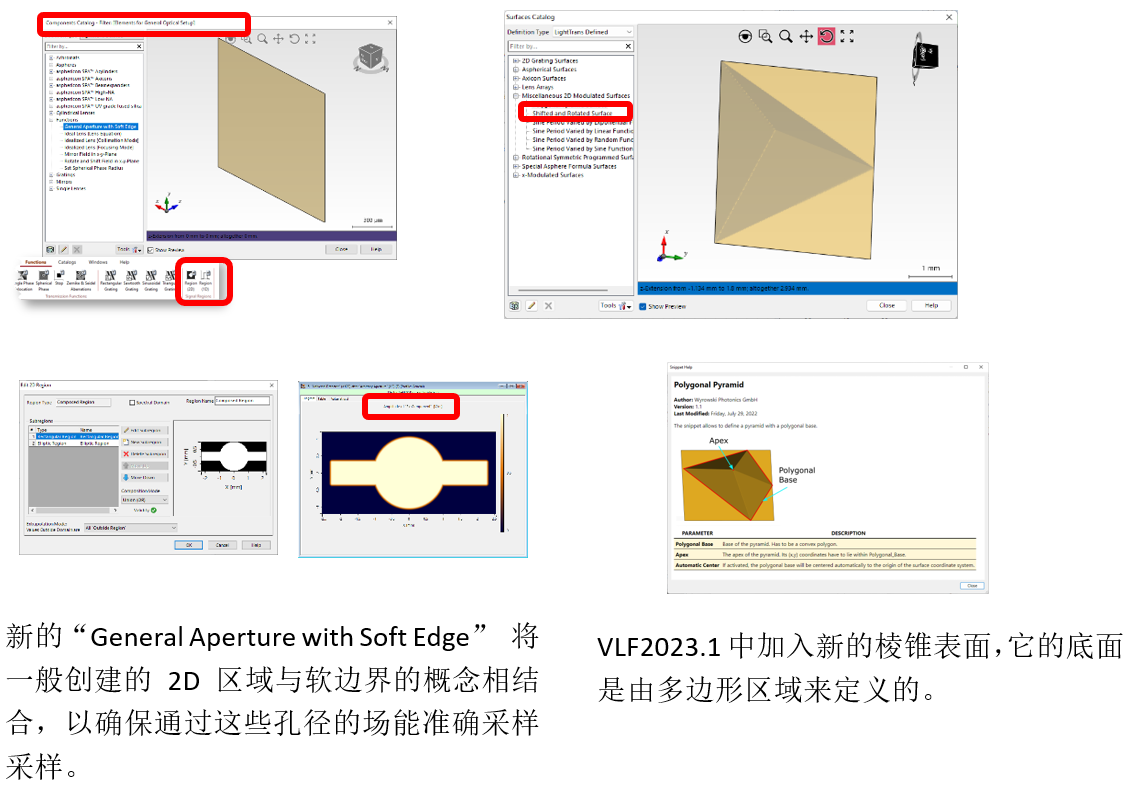
2rb@Md]dx� 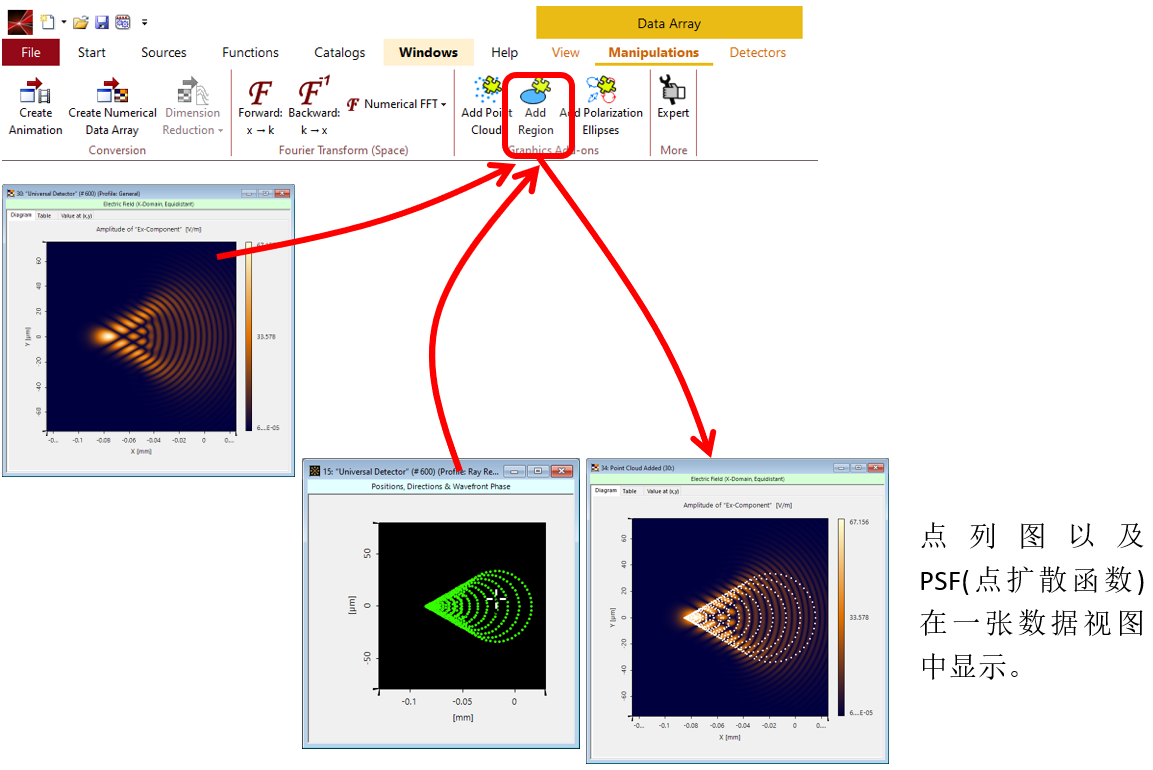 R�\]C�;@J< $)d3�4�JM� VirtualLab中的区域 (Regions) X�8wtdd]64 g{f7�} gTG �?#��RhHD
R�\]C�;@J< $)d3�4�JM� VirtualLab中的区域 (Regions) X�8wtdd]64 g{f7�} gTG �?#��RhHD • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
�,sT5�TS
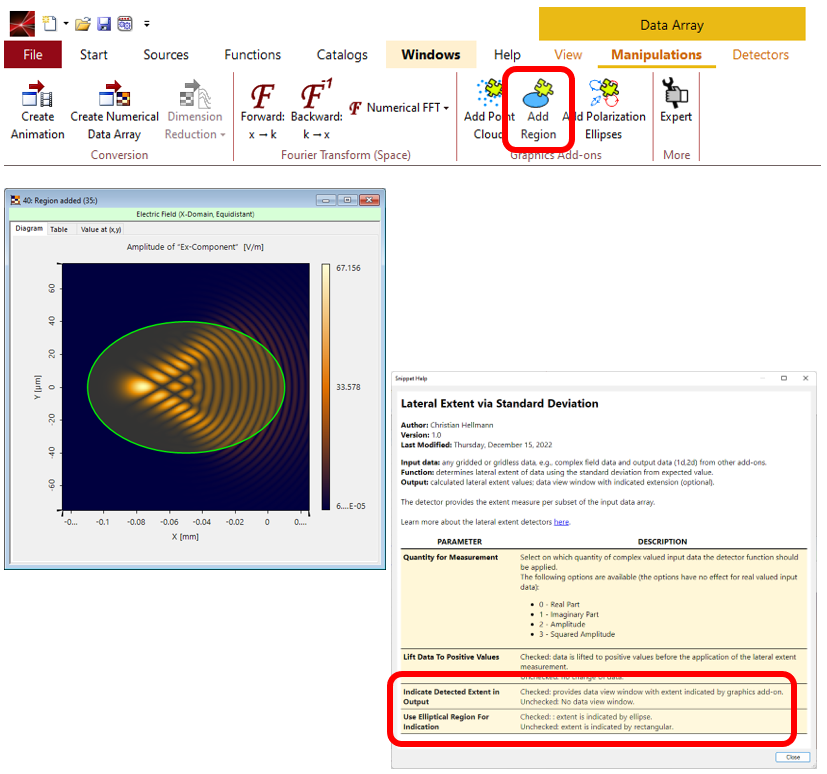
q 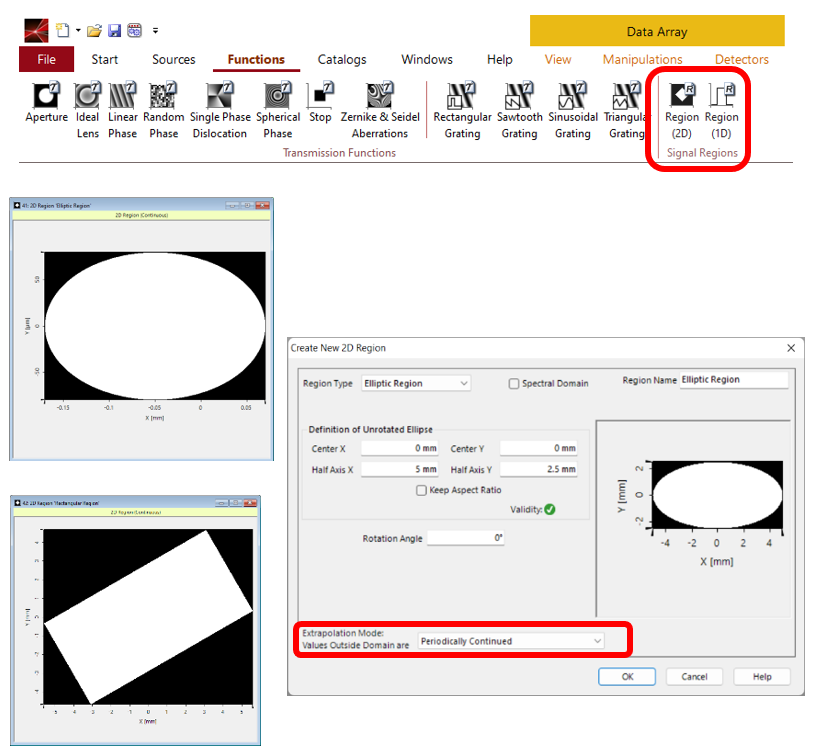 $���EzWUt nj1PR`�AE� eHR]qy 0_X Graphics Add-ons: 添加区域(Add Region) �'�*Ld�,`� /!qP=�ngw9 G,�<l}(tEG
$���EzWUt nj1PR`�AE� eHR]qy 0_X Graphics Add-ons: 添加区域(Add Region) �'�*Ld�,`� /!qP=�ngw9 G,�<l}(tEG • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
�|kTq
&^$  qh6rMqq��� �ZT8��LMPC
qh6rMqq��� �ZT8��LMPC 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
F!��p;��]B #��Tt*��NU Graphics Add-ons: 添加区域(Add Region) �5"X@�<;H% #on ,;QN� ap2g^lQXq • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
5:C>:pA�V� +L�@\/=;G 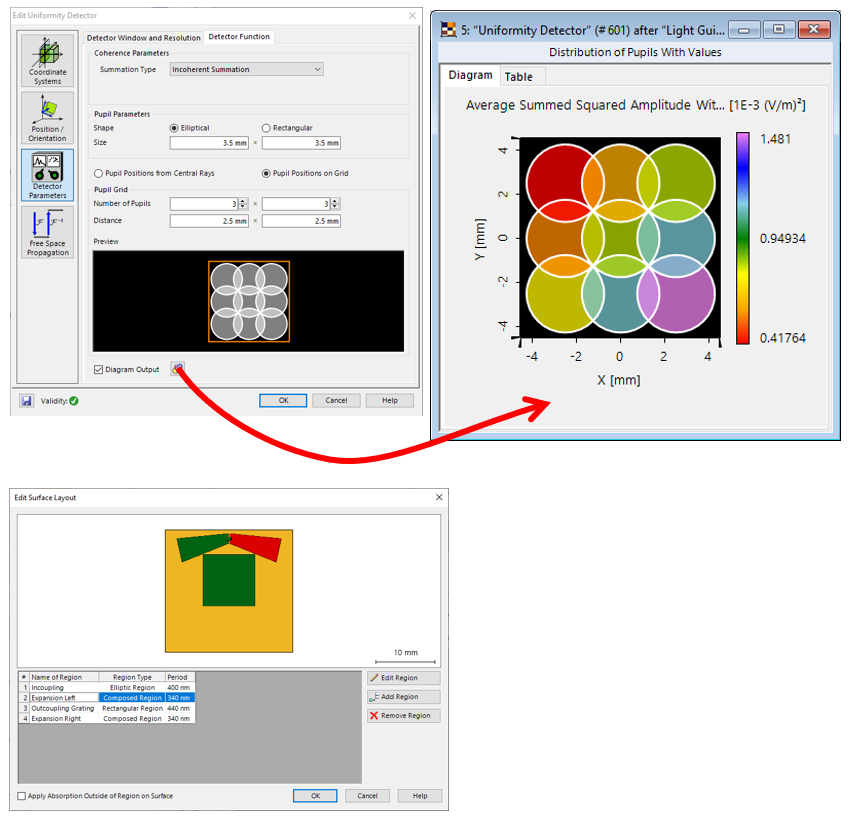 2e0�3m62*
2e0�3m62* • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �DIJm�I�Sk :8HVq*itS� B^/k�`h6J� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
�uPj�p5�;V • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
<]X��6�%LX 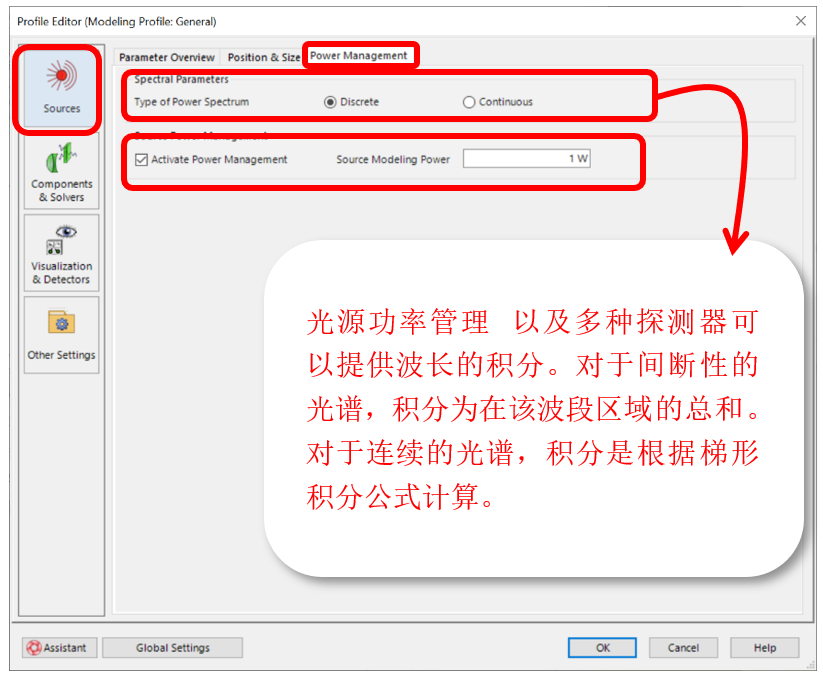 �B*w]y�L(
�B*w]y�L( • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
���?~(#~3x 1. 针对给定光源参数,进行光源功率的评估。
mx�
UyD[�| 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
!l Egta[Ql Wta�Of�_� 组件 u[oV��
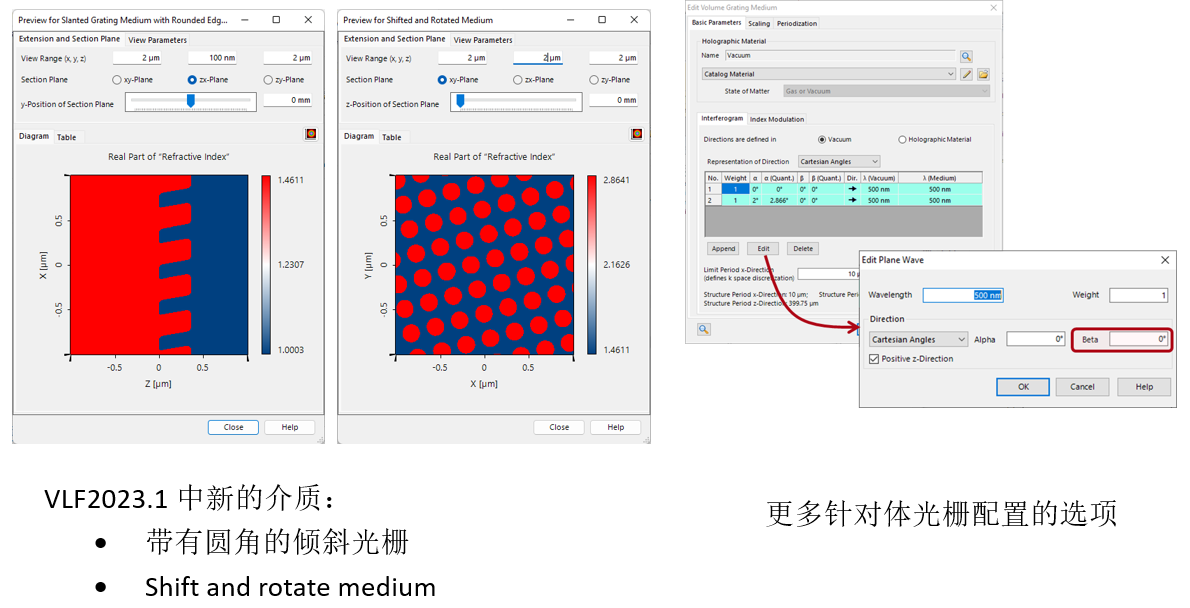
Jvc 组件(Component)新的特征 $�G5:/�,Q )Y9\>X�j�7 �0L1sF'Z�N • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
�@65xn)CD{ 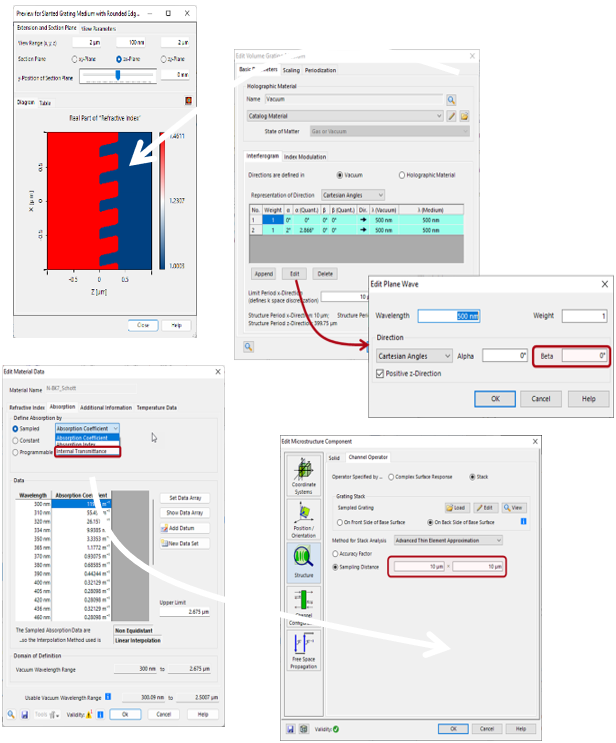 o*ucw3s>� >/l��B%<$/ 组件(Component)新的特征 e+D��]9wM8
o*ucw3s>� >/l��B%<$/ 组件(Component)新的特征 e+D��]9wM8
Dl��n1 R�[
 .\&k]}0qA?
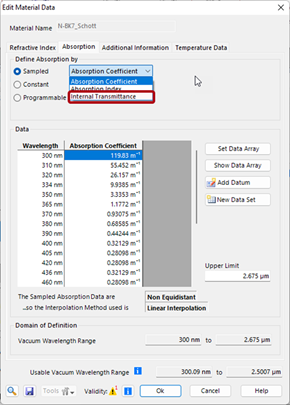
.\&k]}0qA? 吸收特性可以用采样数据定义吸收率以及透过率。
U_�j[<.aN) C�&R��� U� 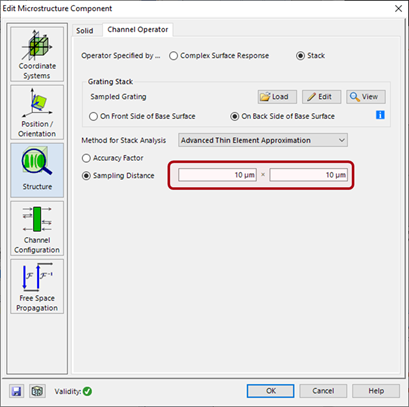 ^SKHYo`,,N -sZb+2�tDa
^SKHYo`,,N -sZb+2�tDa 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
�9I;~P�� & �41s�\^'^& 组件(Component)新的特征 0fn*;f8{XJ
�odC"#Rb��
 ?6{��g7�S% �F|qM��o| 组件(Component)新的特征 �4>La�A7)v
?6{��g7�S% �F|qM��o| 组件(Component)新的特征 �4>La�A7)v
u[Si=)`VPk
 ey,f igjd. `]]��<�.>R 组件(Component)新的特征 \�AH5�zdK
ey,f igjd. `]]��<�.>R 组件(Component)新的特征 \�AH5�zdK
i$Kx@,O8�t
 B�RskxyL&, �P}���UxA! +,�AzxP
_y
B�RskxyL&, �P}���UxA! +,�AzxP
_y 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
U��i"�{0%� 处理日志 ��hf0(�!C* a0gg<�M��l 扩充版的处理日志 ��qsbV�)c� �n%#3xo�a PnI�ns�f%; • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�un�ew
XHA 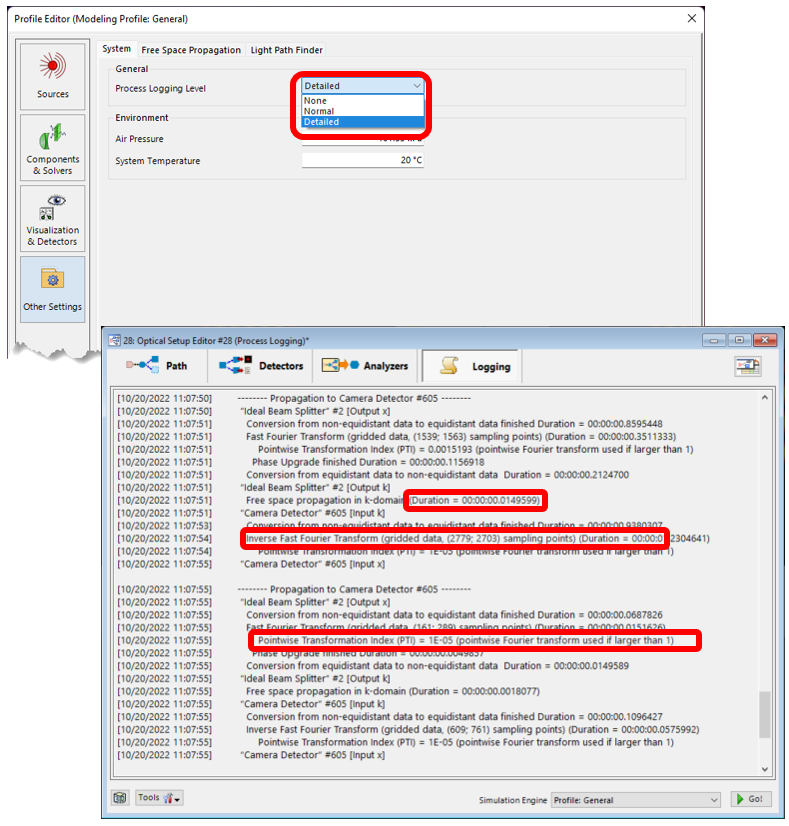 m"�'LT0nur /�|��i*'6* 系统仿真分析 ?��[�m�1?� �W�02�z}"#
m"�'LT0nur /�|��i*'6* 系统仿真分析 ?��[�m�1?� �W�02�z}"# • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
"a�C�B�}�� 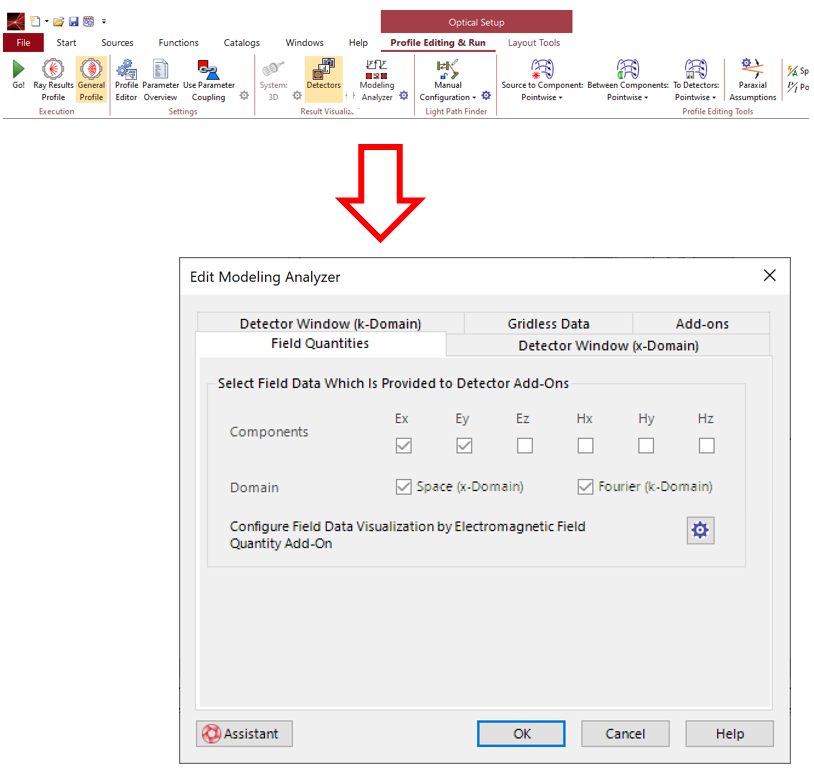 ��[+��pa,^ "��)�\V� 专家模式(Expert Modus) �W�ysWg7,r �&*ocr��&� 专家模式中的数据阵列’Manipulations’ 0F%8d�@Y2 �Z�_4�%�Oi 0m4M��@94
��[+��pa,^ "��)�\V� 专家模式(Expert Modus) �W�ysWg7,r �&*ocr��&� 专家模式中的数据阵列’Manipulations’ 0F%8d�@Y2 �Z�_4�%�Oi 0m4M��@94 • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
k��k6
!krZ 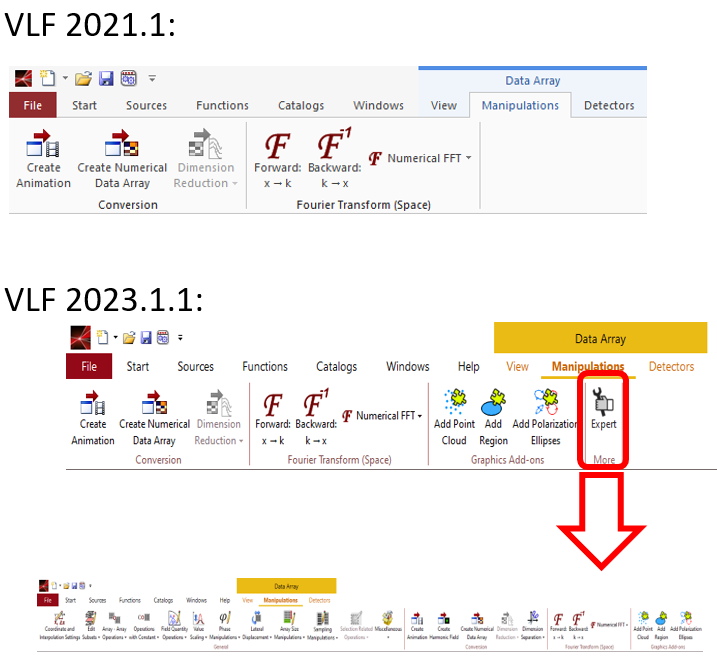 amC)�t8L�? VrP��{U-` 微小的改进帮助:新的计算器 �3~Fag�1Hp %aM�C[��i� tlU��h8o�s
amC)�t8L�? VrP��{U-` 微小的改进帮助:新的计算器 �3~Fag�1Hp %aM�C[��i� tlU��h8o�s • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
YW&�K�,)L@ 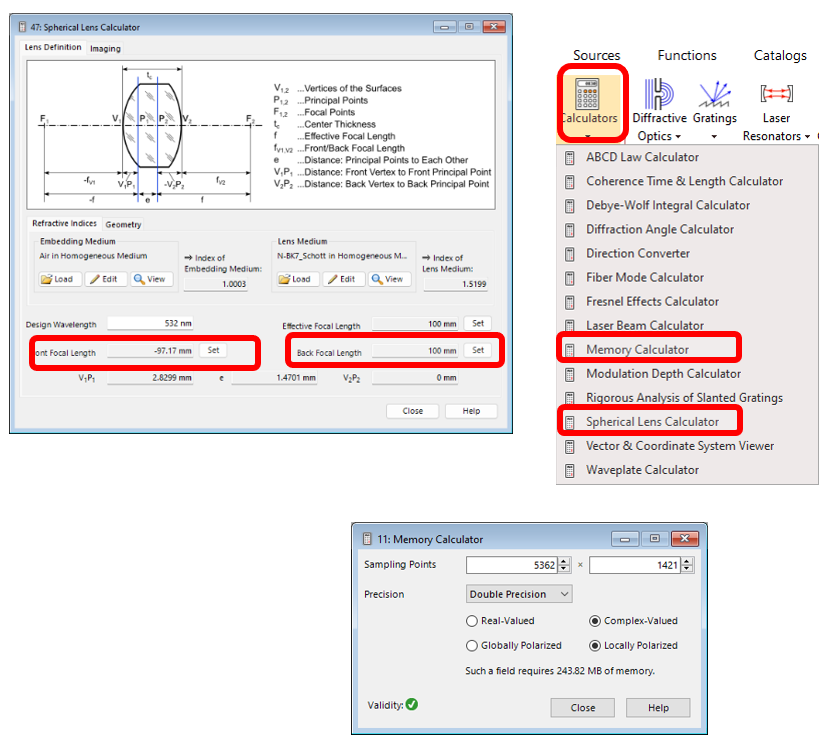 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



