2022 年 12 月,发布 VirtualLab Fusion 2023.1 {d�xl8~/�I VirtualLab Fusion 2023新版本更新内容(三) dMsS OP0E� 2023.1版本新特性一览 .b�P8Z�=� QJ�VB:�>A 基本信息 `uk=2k}&�m
}�1�[s���,
 ��\�>wQ�yz
��\�>wQ�yz  ;Gn>W+Ae
M
;Gn>W+Ae
M VirtualLab Fusion 2023.1新版本
主要更新方向 i%<NKE;v7m
 ;��/wH/!b
;��/wH/!b
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 TB&IB:4�)R
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: RFFbS{��U*
- 更快的速度 !s/qqq:g
- 更容易使用 ?f3����R+4
- 融合更多物理光学模型 "K9[P�:nw
- 更高的透明度 jck(c�c=�R
- 多元的仿真控制选择 u*5}c7)uId
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 -�:'%Y�HxX
Hf1b&�8&:K
I9�aiA�D0s
功能概述(以下为更新内容的详细解释和案例展示): sKKc_H3YSH
数据视图 3WwCo.�q;m
d/Wp>A@dob VLF 2023.1数据视图 "x$L��2>�9 Q��x|HvT2P 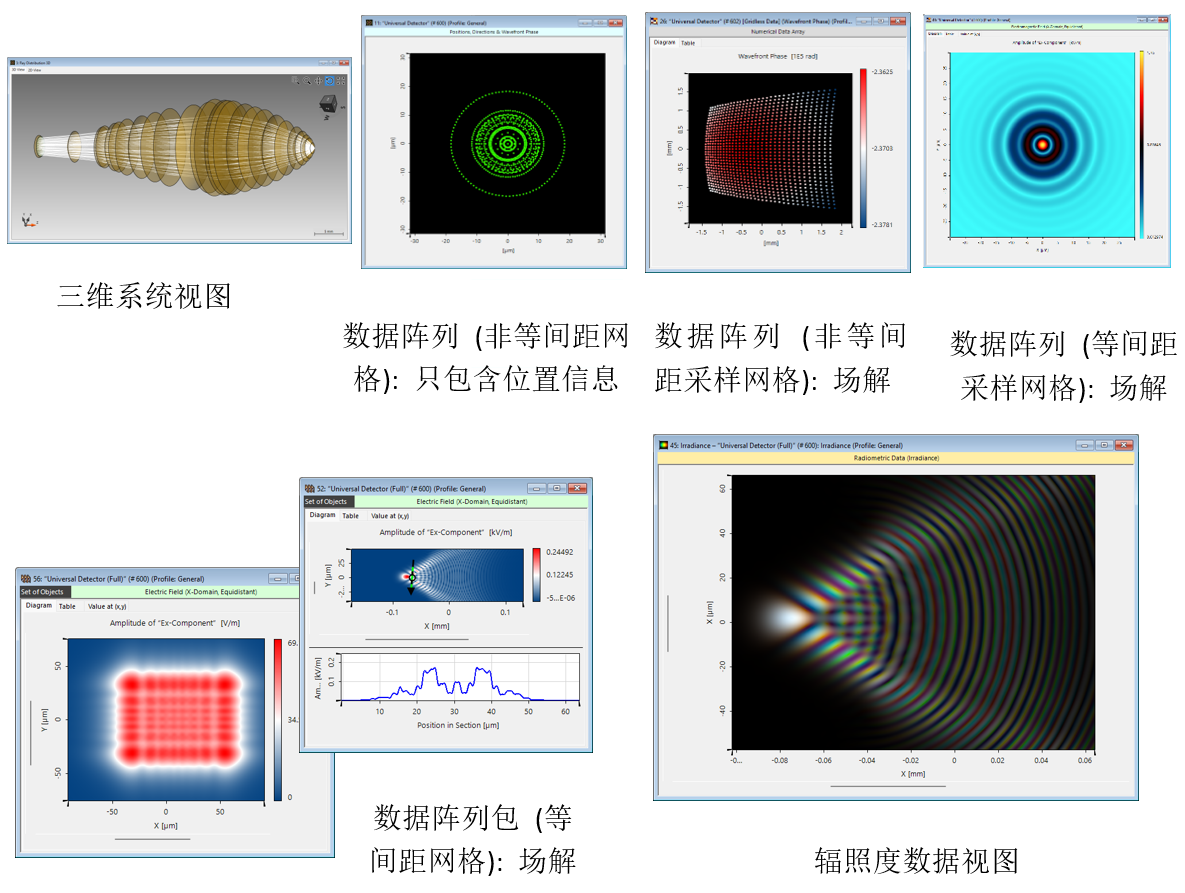 *�H��H�L a p�p1Ko��r� VirtualLab Fusion 2023.1数据查看方式 B�Q[R)o���
*�H��H�L a p�p1Ko��r� VirtualLab Fusion 2023.1数据查看方式 B�Q[R)o���
Ah@e��9`_r
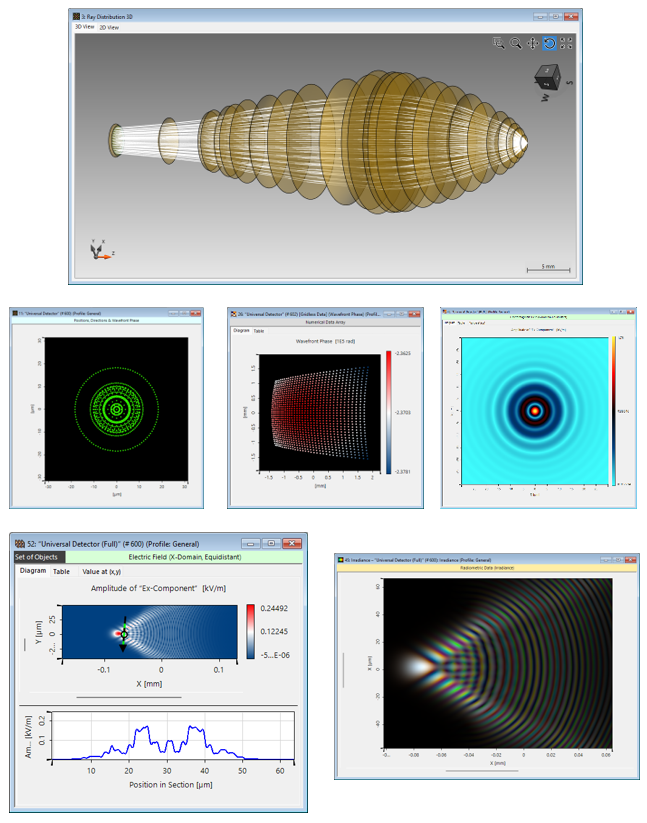 �U�&At��gv B�=^�M�& { 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 *�>zOWocxD 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ecH�7�"��) 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 j x< <h�_j 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 JBOU��$A�~ 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �i?@�7>Ca
�U�&At��gv B�=^�M�& { 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 *�>zOWocxD 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ecH�7�"��) 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 j x< <h�_j 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 JBOU��$A�~ 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �i?@�7>Ca
NJ�d�4( �P
A['(@Bz#7~
三维系统视图: 新的对话框以及设置选项 :(/1�,]�bF
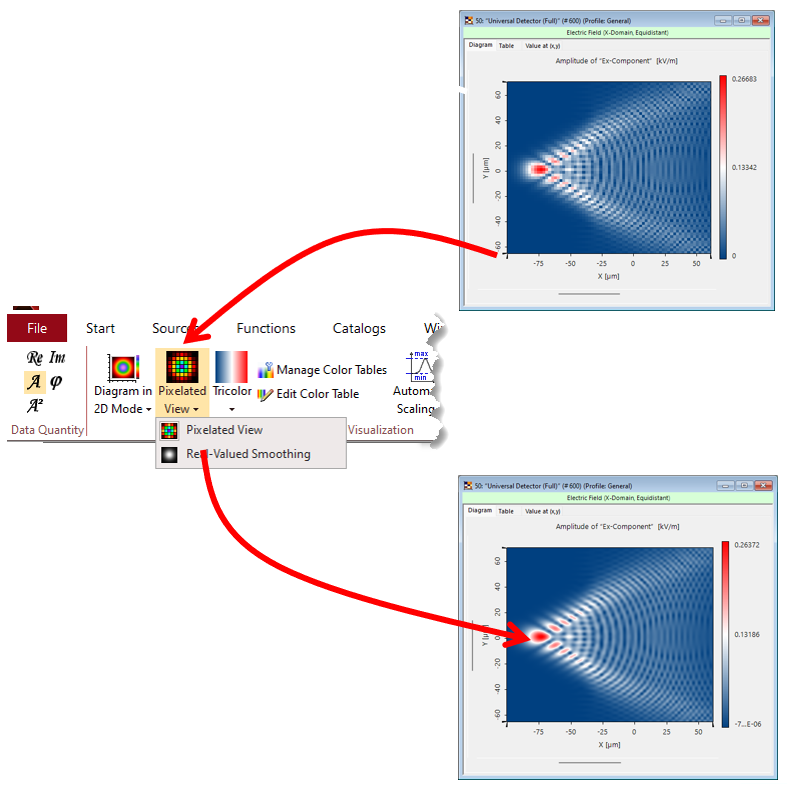
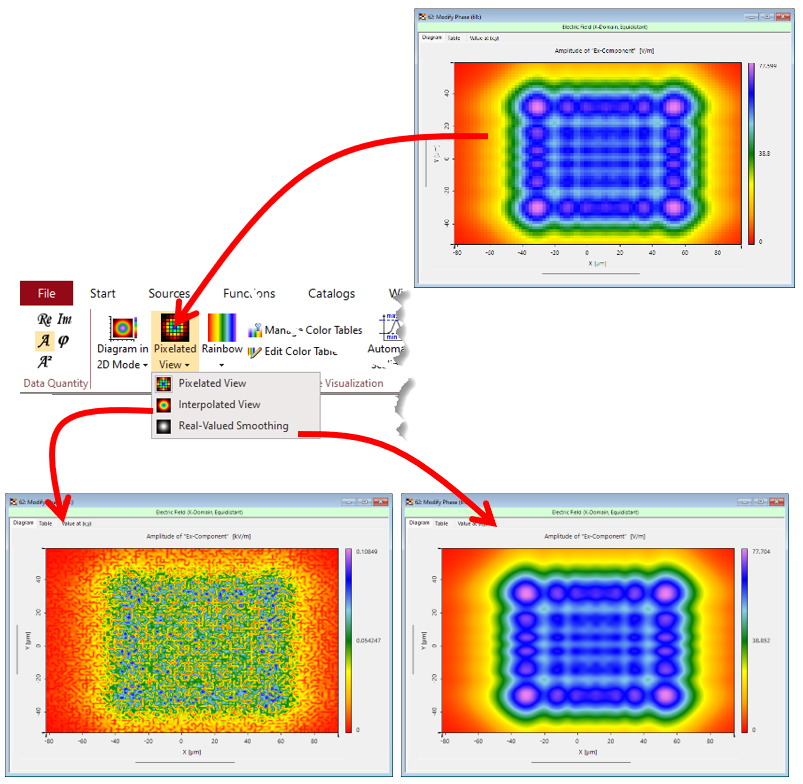
nSQ�]qH&4d 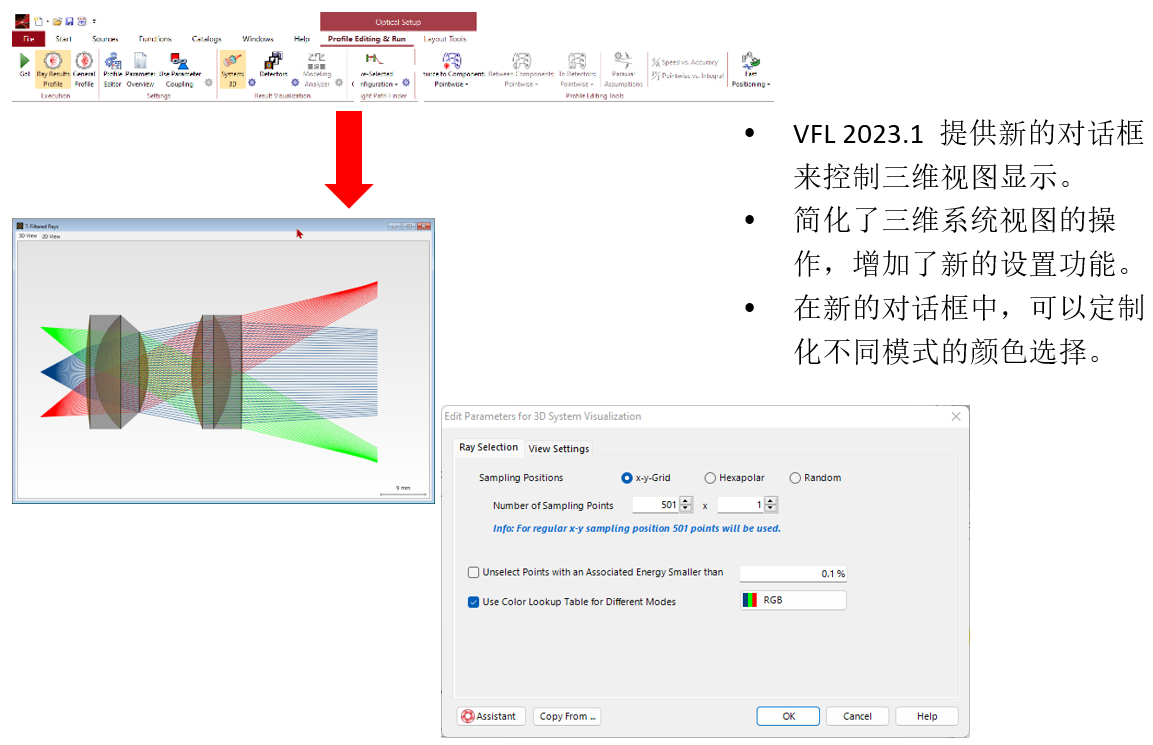 62.C�q�!�~ lH/�"��4�7 数据阵列视图: 像素数据(Pixelated Data)平滑 +l�FBH(o]X tP�2.D:( R • 探测器中的像素越少,探测器评估速度更快。 �0�LzS #J+ • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 D�o�O�
;VF • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �dQ_�'8
) 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 76��o�[qay
62.C�q�!�~ lH/�"��4�7 数据阵列视图: 像素数据(Pixelated Data)平滑 +l�FBH(o]X tP�2.D:( R • 探测器中的像素越少,探测器评估速度更快。 �0�LzS #J+ • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 D�o�O�
;VF • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �dQ_�'8
) 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 76��o�[qay
;*F��Y+jM�
 hR2 �R���
hR2 �R���
nTs��\zikP
数据阵列视图: 像素数据(Pixelated Data)光滑化 IUh9skW�5�
,aP5�)�ZN-
B%t�j-�h(a
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 P��Gxv�4(%
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 QZ7W:%r(�4
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 +Lc+"0*gV*
vm�Oy�e/?k
 HpUJ��_p�Z
HpUJ��_p�Z
(;�9fkqm%m
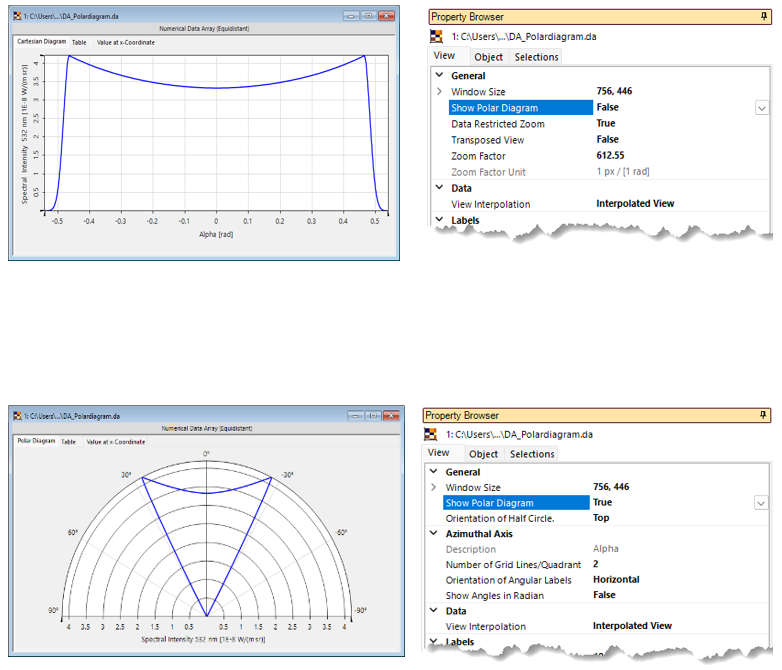
数据阵列视图: 极坐标图(Plolar Diagram) ;"EDF�H#W�
x#�5[�i;-c • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 ��T��PkP5w • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 u6Ux �nqNc • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 ^c.pvC"4j� • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 ^e� =xEZ�D
iGj�,B =35
 �-H[@]�Q4w
�-H[@]�Q4w
S�;8=+I,��
数据阵列视图:找寻以及点的标识 �F/j� �; q
�3^q9ll7Op
.�)�,9a�,
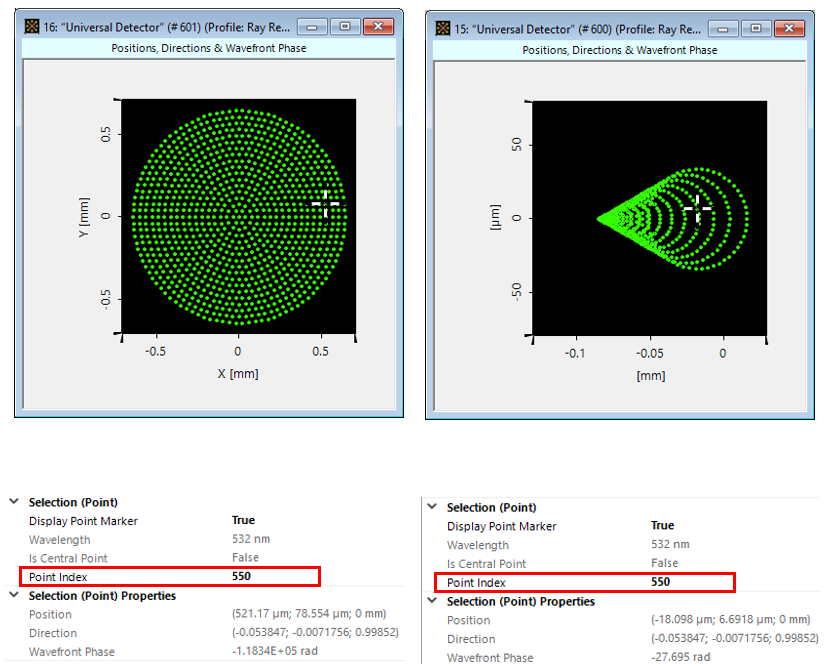
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 &+oJPpHi�\
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 8(q8}s$�>�
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �V8o�,
�e
QJ�R},nZ3�
 ��9<P�%?�Q
��9<P�%?�Q
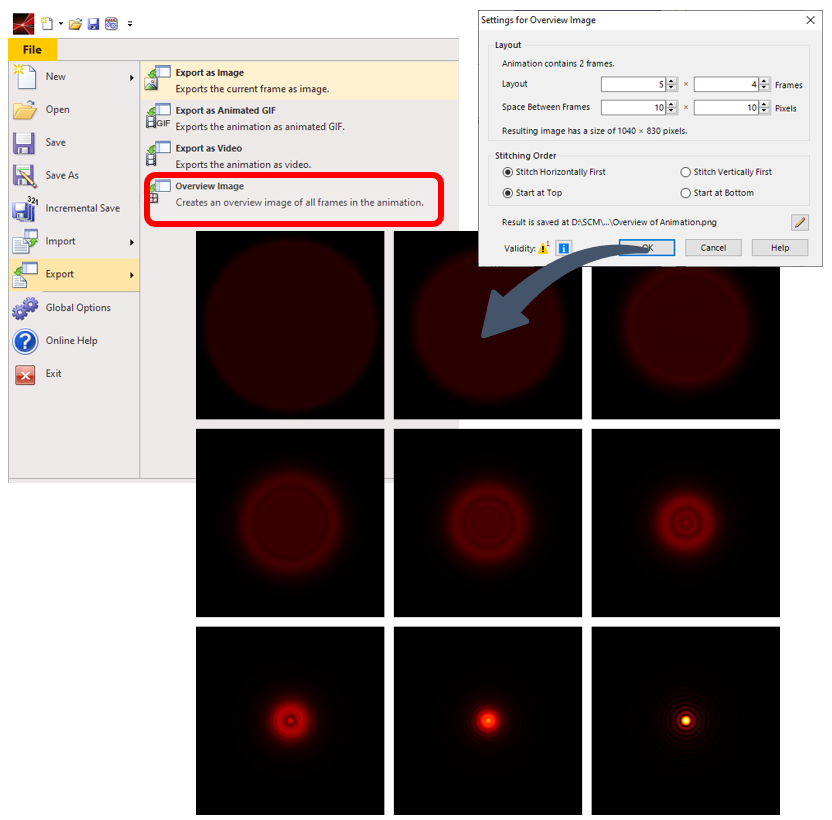
D�?*�du�#6 导出图像的概览 P$�AHw;n[R }lJ|nl�`�c Q�($@{[�lT
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �K~^o�06 Y
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 <b�hJ���>�
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 +�
<w6sP�m �lY,9bS�F$
 ,1��<�6=vL
,1��<�6=vL
�9T`�YHA'g
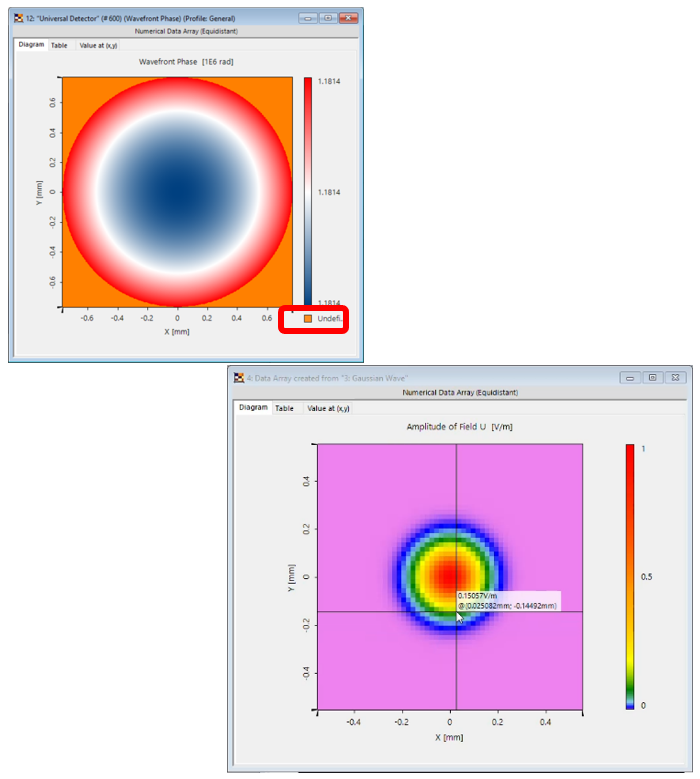
数据阵列视图: 更多的新功能 sMJa4�P>O@
Ua�QW<6�+
,5t_}d|3C=
• VFL2023.1可以对未定义区域填充不同的颜色。 *?��W�r�^T
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 xZV|QV�Y�;
�I7'v�;�*�
 =�b�vLM�pa
=�b�vLM�pa
�*(/b{�!�~
Graphics Add-ons提供更多数据视图选择 6�*��>�vie l�#>A.-R*` ��X�IM?$p^
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 �-,m��V~y�
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 �mc,Hlii�J
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 ~e){2_J&�n ^y|`\oyqwN 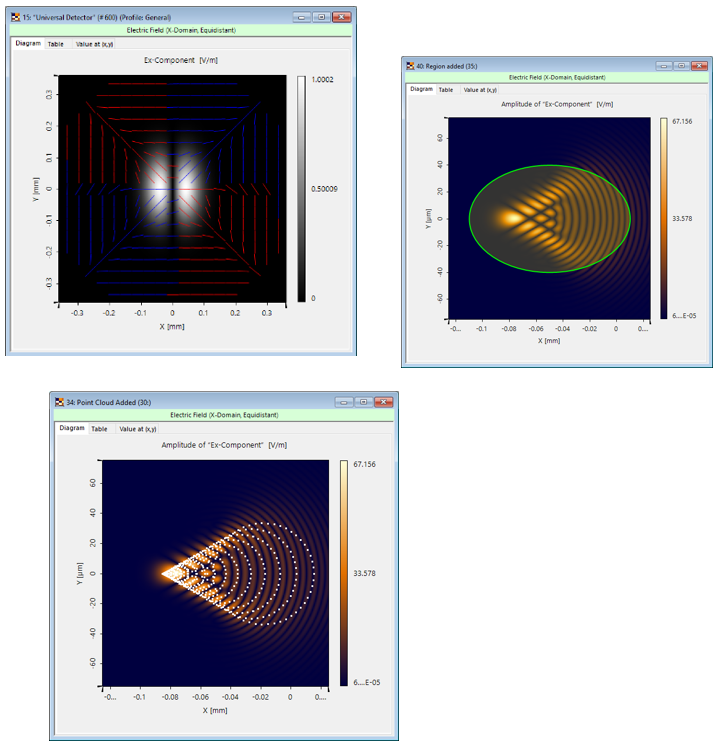 [fkt3�fS�� B�*QLKO:)i 2AxKB+c1`� Graphics Add-ons提供更多视图选择 �8zJye6f;l C^U>{j�f !
[fkt3�fS�� B�*QLKO:)i 2AxKB+c1`� Graphics Add-ons提供更多视图选择 �8zJye6f;l C^U>{j�f ! • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
=P�jdL3��2 • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
K3rsew
�n • 图像组件提供了多样化的配置选项。
5Go��@1X]I T����n>L�? 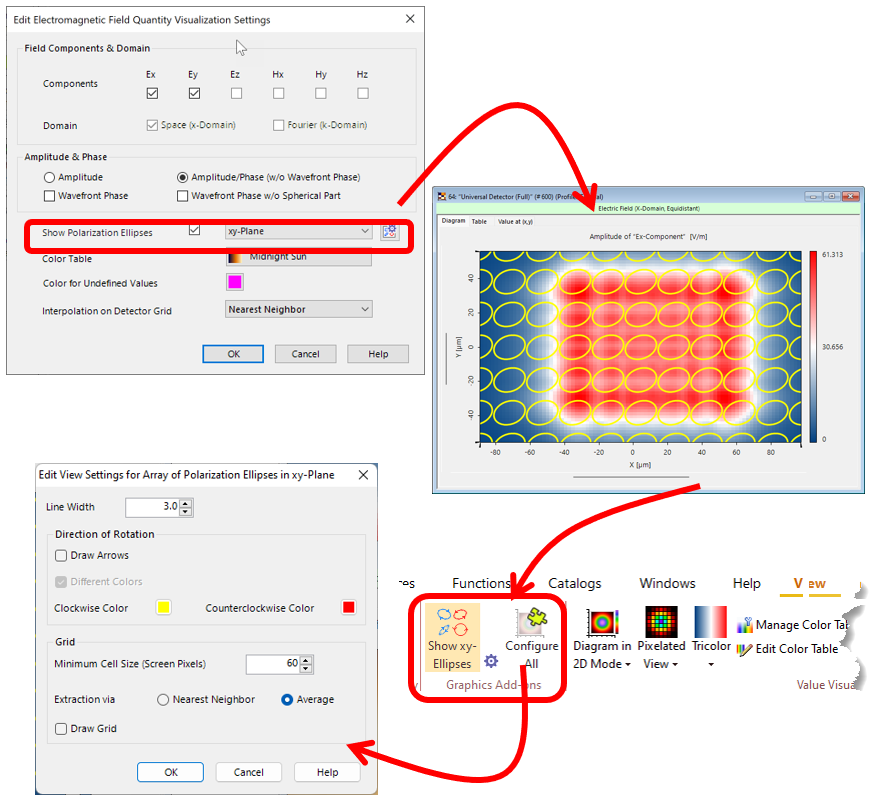 yB;K|MXy? .0X 5���Vy U}<zn+SI#V Graphics Add-ons: 增加了 Point cloud 功能 n�vodP�"iV i��5*/�ZA_ ��LR�"7e�
yB;K|MXy? .0X 5���Vy U}<zn+SI#V Graphics Add-ons: 增加了 Point cloud 功能 n�vodP�"iV i��5*/�ZA_ ��LR�"7e� • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
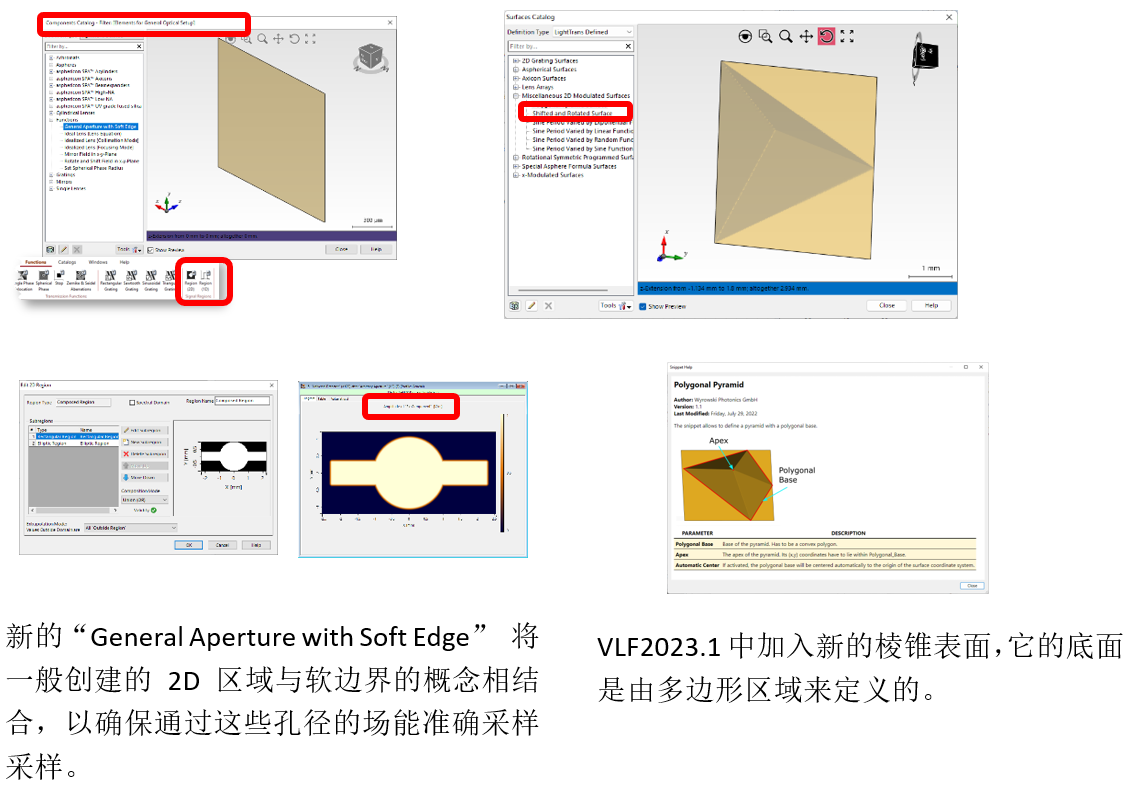
Gh%dVP9B@P 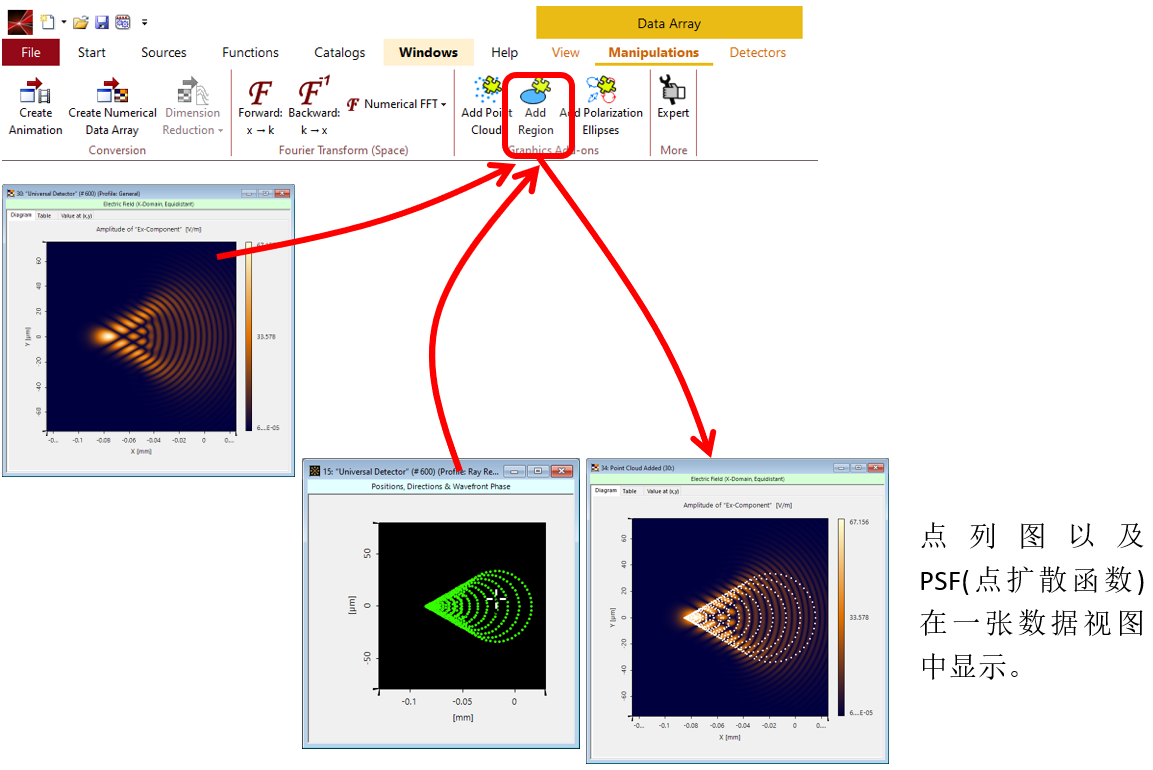 �[Mv'*.�7� N#:W#C{16w VirtualLab中的区域 (Regions) gG�(9&}@( y,<\d/YY�@ \C1`�F�[d_
�[Mv'*.�7� N#:W#C{16w VirtualLab中的区域 (Regions) gG�(9&}@( y,<\d/YY�@ \C1`�F�[d_ • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
�
2&o�3OKt 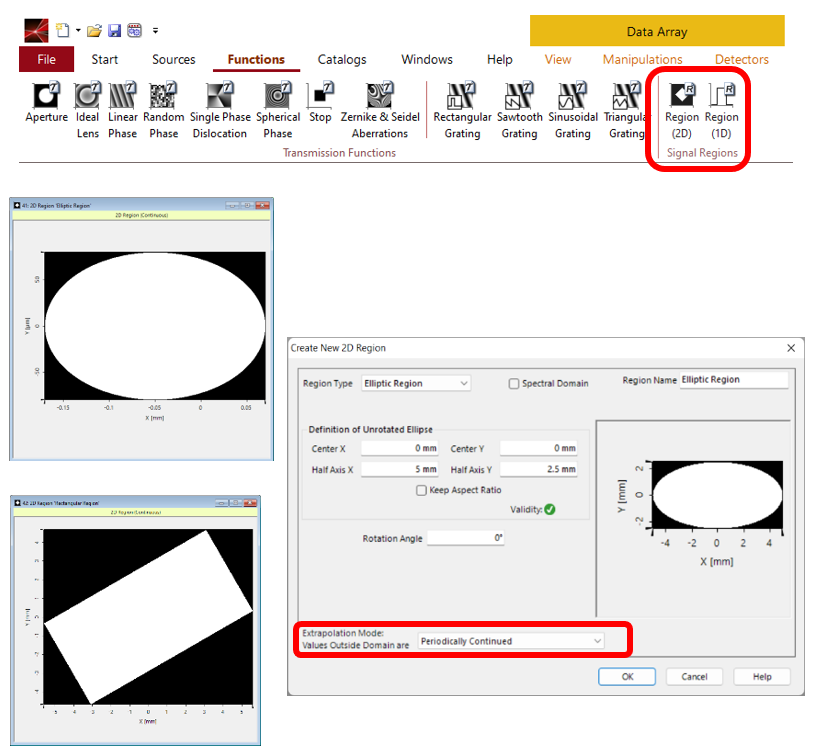 �b|@�f!�lA v�}^uN+a�5 "��#%9dWy� Graphics Add-ons: 添加区域(Add Region) A_J�!V�Xq� }~��<9*M-P Y#�U0g|UDn
�b|@�f!�lA v�}^uN+a�5 "��#%9dWy� Graphics Add-ons: 添加区域(Add Region) A_J�!V�Xq� }~��<9*M-P Y#�U0g|UDn • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
kH62#[J)yM 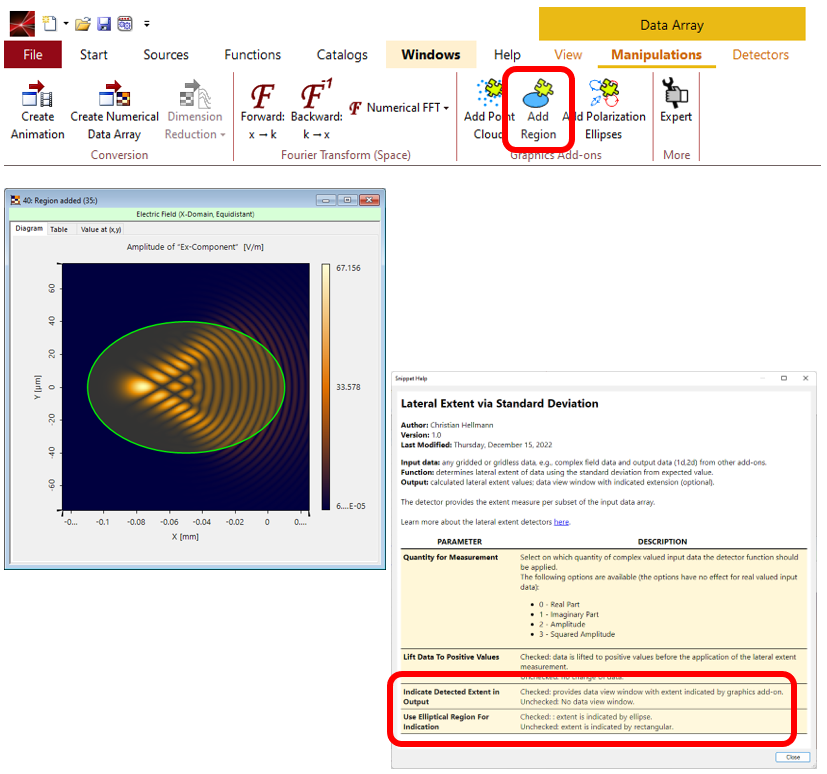 �}.<�]�A�� h>|IA�@;|f
�}.<�]�A�� h>|IA�@;|f 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
?��V)M���! >+ Im:f��D Graphics Add-ons: 添加区域(Add Region) �6ZGw 3p�) ��H��|;�BT $�1D>}�5Ex • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
(xBWxe�L~� K!!�#�";Eo 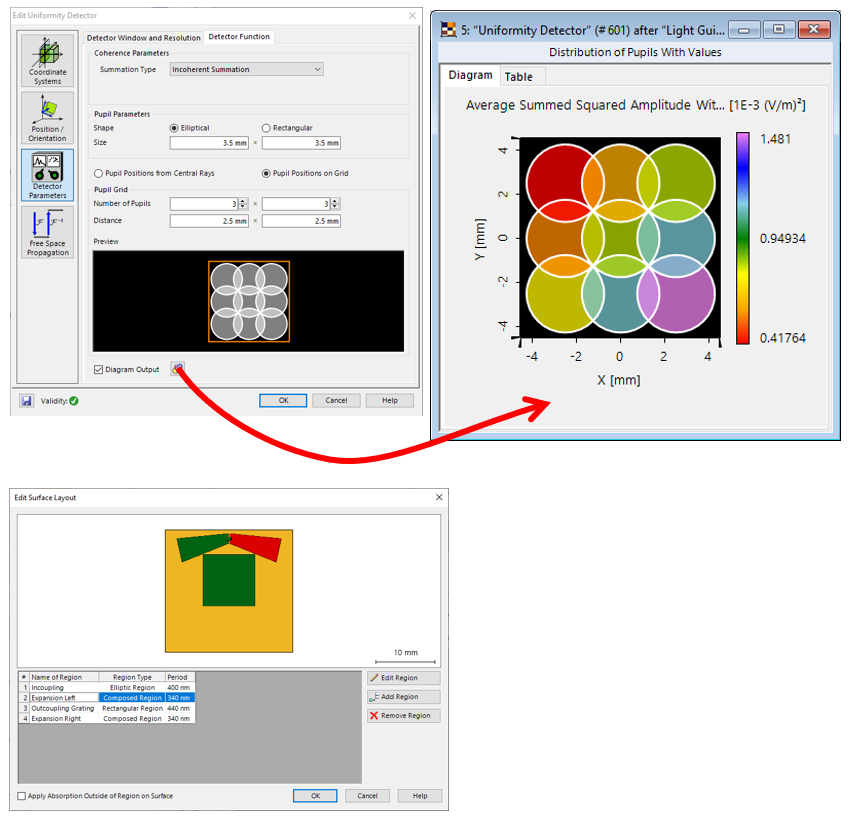 :C��#(��yp
:C��#(��yp • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 p,�OB;Ncf/ re@OPiXa v g�v�xOo#8] • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
�1-px�M~Y� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
z'Fu�} h�o 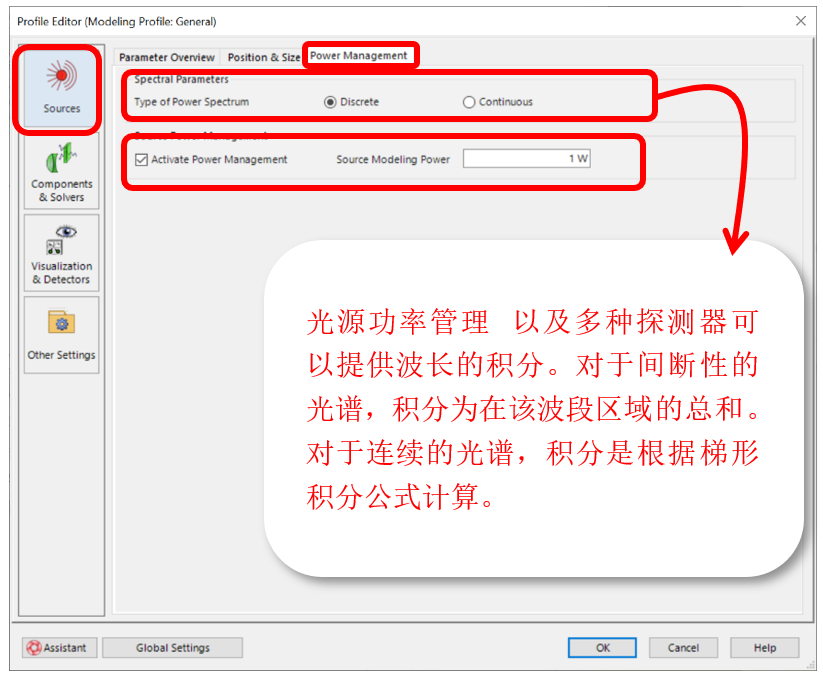 ��}�_?FmuU
��}�_?FmuU • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
E-$N�!��KY 1. 针对给定光源参数,进行光源功率的评估。
M� >s,I��^ 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
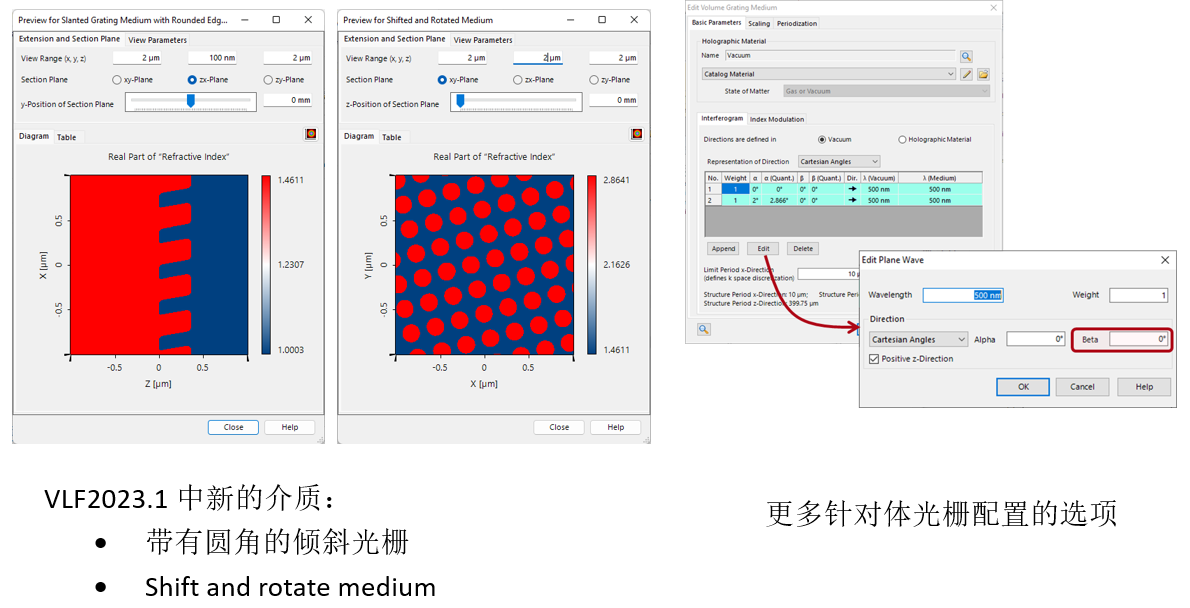
w�"E.�V�a� D}���pN�sQ 组件 P�# Z��+:T 组件(Component)新的特征 �5�9a�7�%w +~EF�RiP] ��a0�B,[�i • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
9M �.cTIO{ 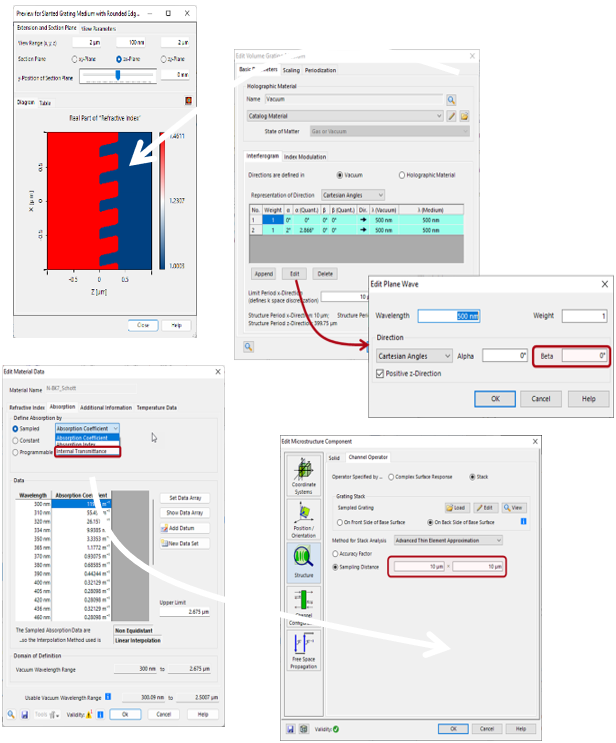 �hr G��fA� �xJ�E��26i 组件(Component)新的特征 Ky[-ZQQo=5
�hr G��fA� �xJ�E��26i 组件(Component)新的特征 Ky[-ZQQo=5
Z�%Yq{tAt�
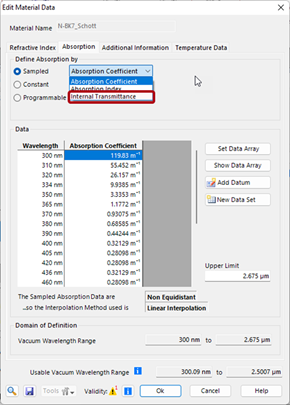 :x���_;��-
:x���_;��- 吸收特性可以用采样数据定义吸收率以及透过率。
�/A%31WE&1 6v�Z.C�UK9 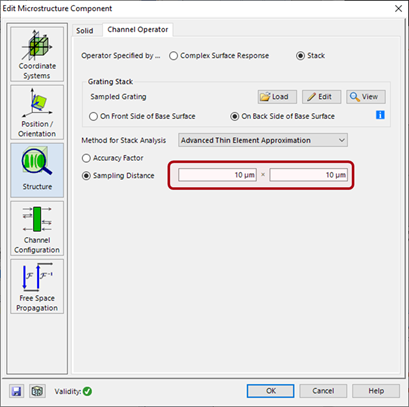 )Yw m_f�-N 6�^Ax�3#�q
)Yw m_f�-N 6�^Ax�3#�q 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
1\��if XJ !K_�� ke h 组件(Component)新的特征 l �Gy�`{E|
`bRt_XGPmF
 ��#�,\qjY� gn�4�S�z") 组件(Component)新的特征 U��P� e�@>
��#�,\qjY� gn�4�S�z") 组件(Component)新的特征 U��P� e�@>
�L�]D�l�}z
 �Xx=�c�'j< 7V7i�Ibi�� 组件(Component)新的特征 )?�,X\/�5�
�Xx=�c�'j< 7V7i�Ibi�� 组件(Component)新的特征 )?�,X\/�5�
��Qj/�.x#T
 L[p[m~HjG^ `1U?^9�Nf� B)(��Z�R�H
L[p[m~HjG^ `1U?^9�Nf� B)(��Z�R�H 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
�3h>5��6{P 处理日志 ��pksF|�VS W*N�K�-�F[ 扩充版的处理日志 �5R�"(4a P g�ye'_AR?k �|H�@1g=q • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
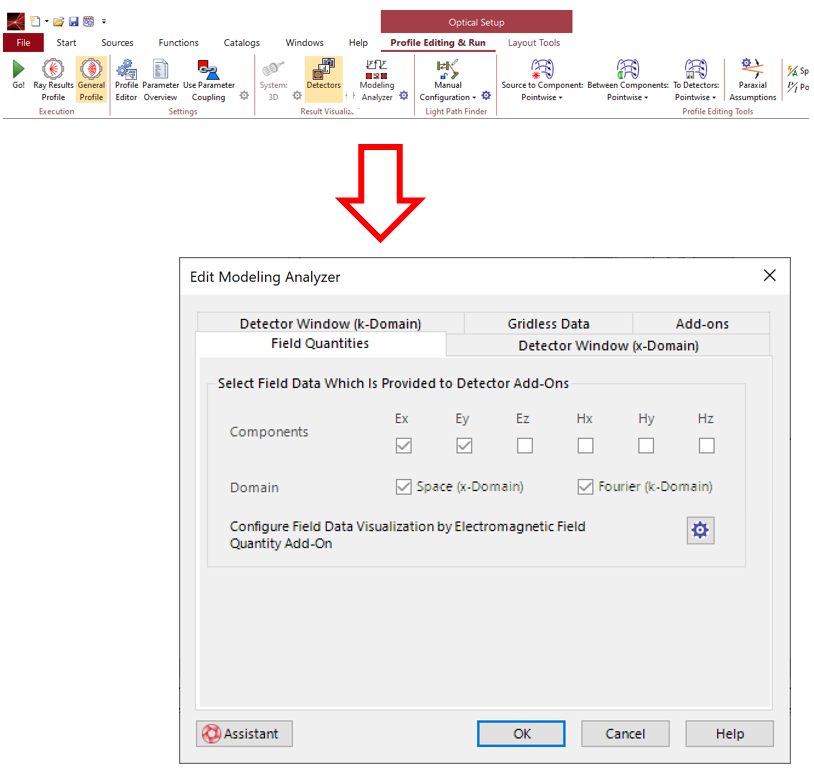
%DF-;M�"8� 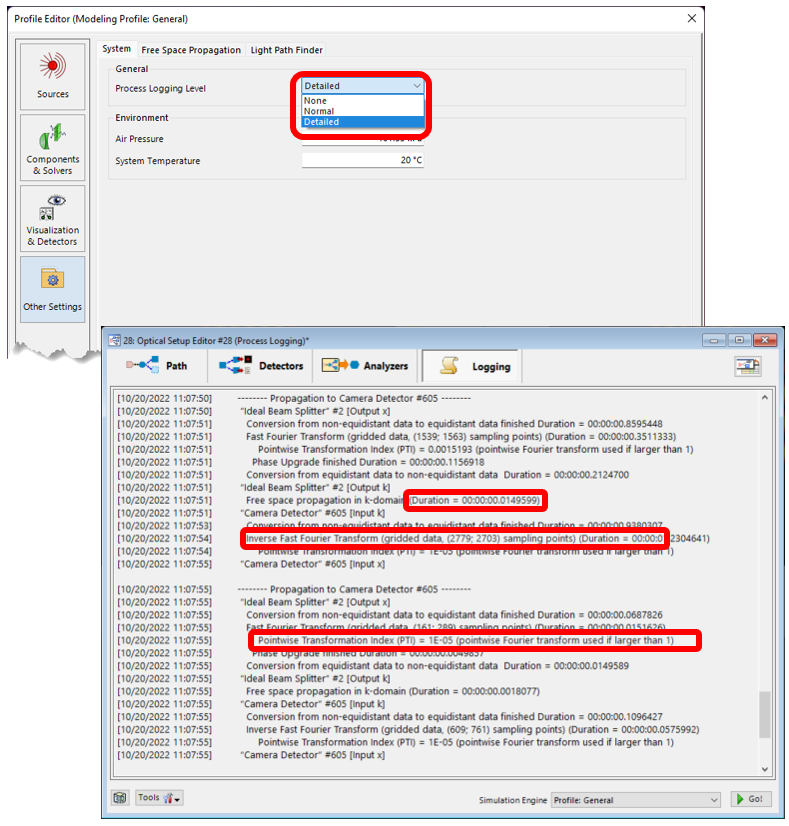 a�2�`|6M�; ���N'�e3<� 系统仿真分析 �@G>Q(a*,� -PH!U� H�g
a�2�`|6M�; ���N'�e3<� 系统仿真分析 �@G>Q(a*,� -PH!U� H�g • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
D�= LLm$y
 -c'~�0�g]< \�>G�Hc}� 专家模式(Expert Modus) XCU>b�[Cj, CLX!qw]@ + 专家模式中的数据阵列’Manipulations’ dd@-9?�6�M DAt��Zp%�� ����C%\�.
-c'~�0�g]< \�>G�Hc}� 专家模式(Expert Modus) XCU>b�[Cj, CLX!qw]@ + 专家模式中的数据阵列’Manipulations’ dd@-9?�6�M DAt��Zp%�� ����C%\�. • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
�W�k&g!FR� 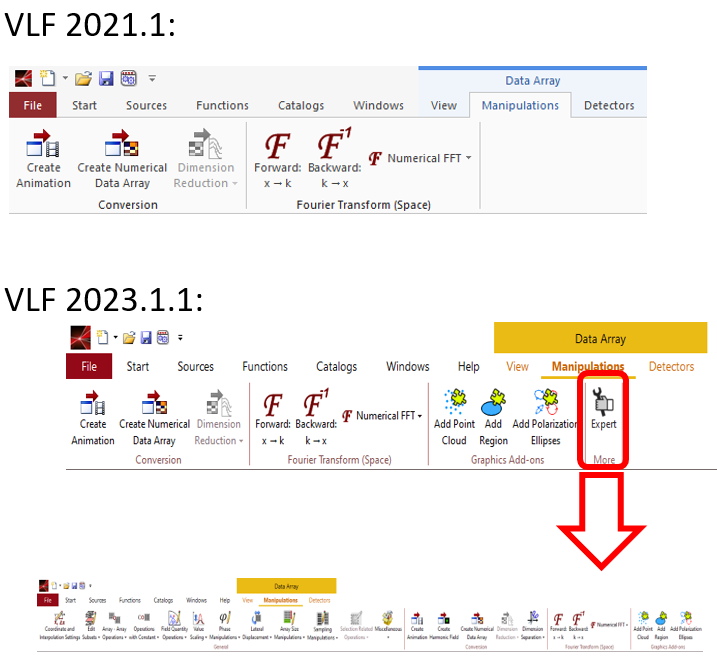 zz~�AoX7V6 BjyGk�+A�� 微小的改进帮助:新的计算器 Z4�'8x h)- �~xaPq=�AH #9�9�fFs`w
zz~�AoX7V6 BjyGk�+A�� 微小的改进帮助:新的计算器 Z4�'8x h)- �~xaPq=�AH #9�9�fFs`w • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
zd�+�<1R;� 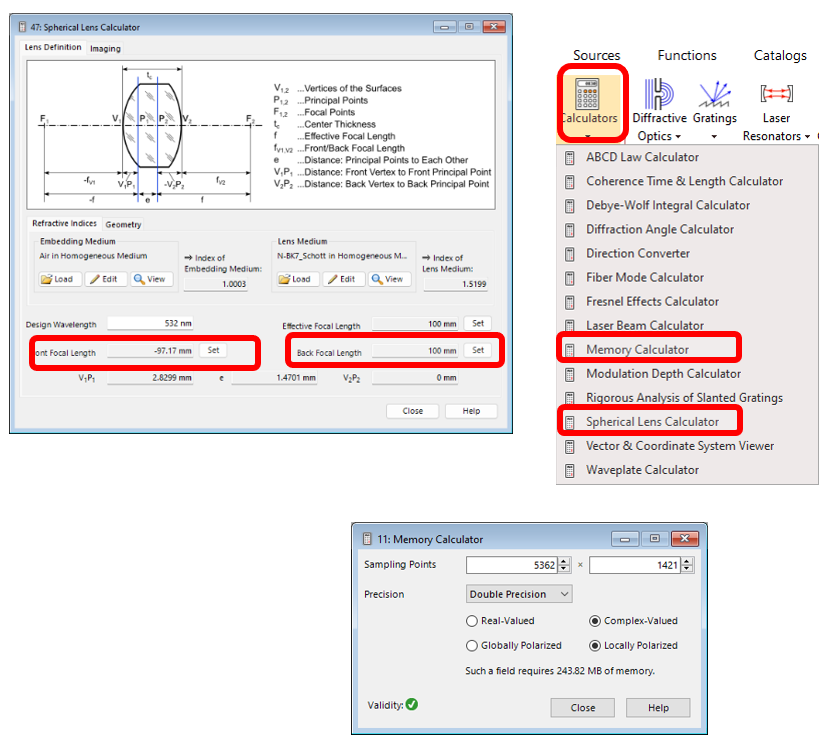 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



