2022 年 12 月,发布 VirtualLab Fusion 2023.1 [�}�t^+�^/ VirtualLab Fusion 2023新版本更新内容(三) ��$^j�#z^7 2023.1版本新特性一览 ��U/3�<�p8 OtFG�o���8 基本信息 Z<�/.�Ss 4
&F#K=R| .j
 �$���z���5
�$���z���5  �Sn!�5/�9Y
�Sn!�5/�9Y VirtualLab Fusion 2023.1新版本
主要更新方向 b;%>?U`>�p
 I&G"�{Dl94
I&G"�{Dl94
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 |#?:KvU97E
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: �zy�i;v�u
- 更快的速度 !U8n=A#,�-
- 更容易使用 s'JbG&T[�J
- 融合更多物理光学模型 �wP�r�qFpf
- 更高的透明度 X��{G&r�$�
- 多元的仿真控制选择 �s'W�u \r'
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 %d�"d<�pvx
u</LgO�P`-
UY$L�qe��~
功能概述(以下为更新内容的详细解释和案例展示): �x|l�X1Mh$
数据视图 ,37\8�y?o\
4�RoE>m1[G VLF 2023.1数据视图 �>�s|zr�S) ���.bv�EE� 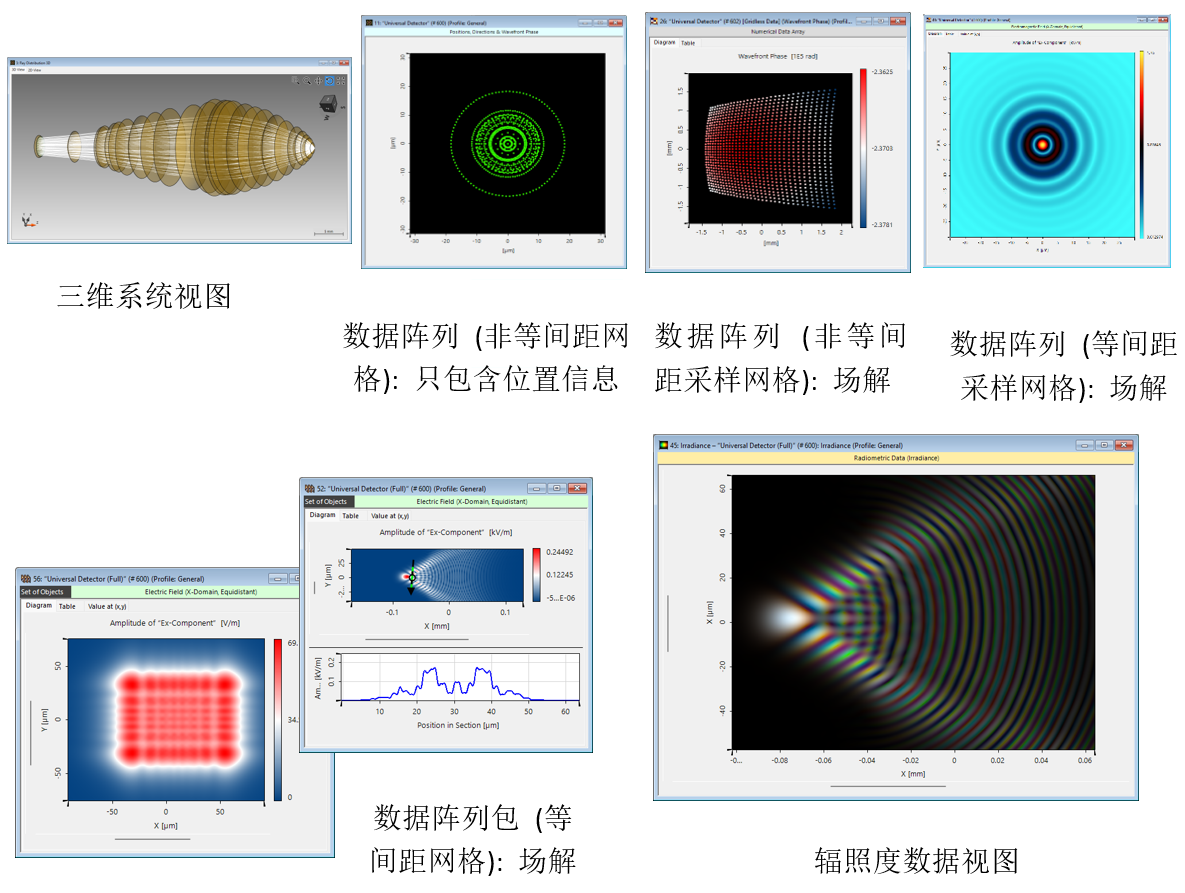 �Vx*O^c�M ���{IA3`y~ VirtualLab Fusion 2023.1数据查看方式 T_/� n#�e
�Vx*O^c�M ���{IA3`y~ VirtualLab Fusion 2023.1数据查看方式 T_/� n#�e
S�@Q��4fmH
 �ATscP �hk �GW;O3�5
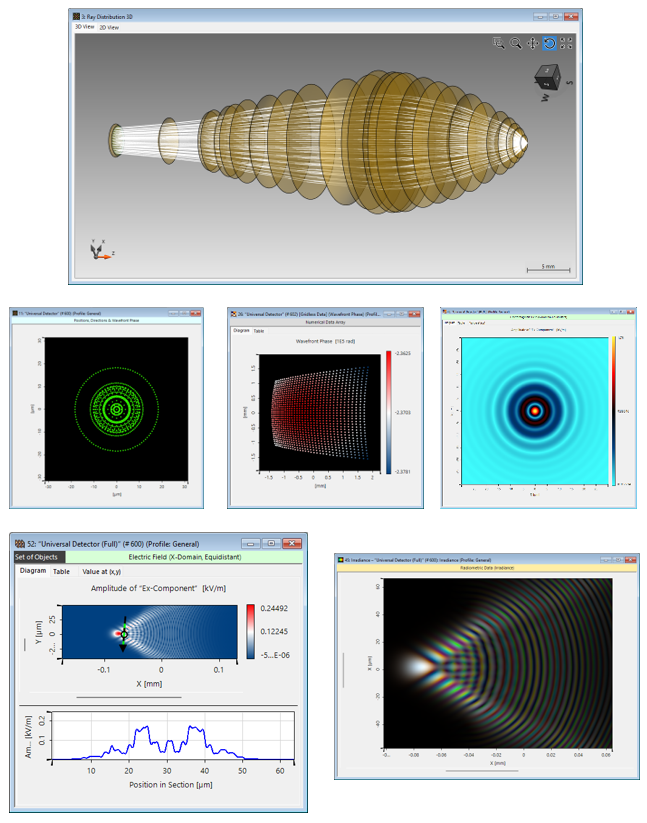
m 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 zV�yMmw�\ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 h"$���)[k~ 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 iw\yVd^]:k 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 2U.'5uA"L� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 yka�t0i�qo
�ATscP �hk �GW;O3�5
m 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 zV�yMmw�\ 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 h"$���)[k~ 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 iw\yVd^]:k 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 2U.'5uA"L� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 yka�t0i�qo
K|��sk]2.
5~GH*!h�%;
三维系统视图: 新的对话框以及设置选项 eNc>^:&y�*
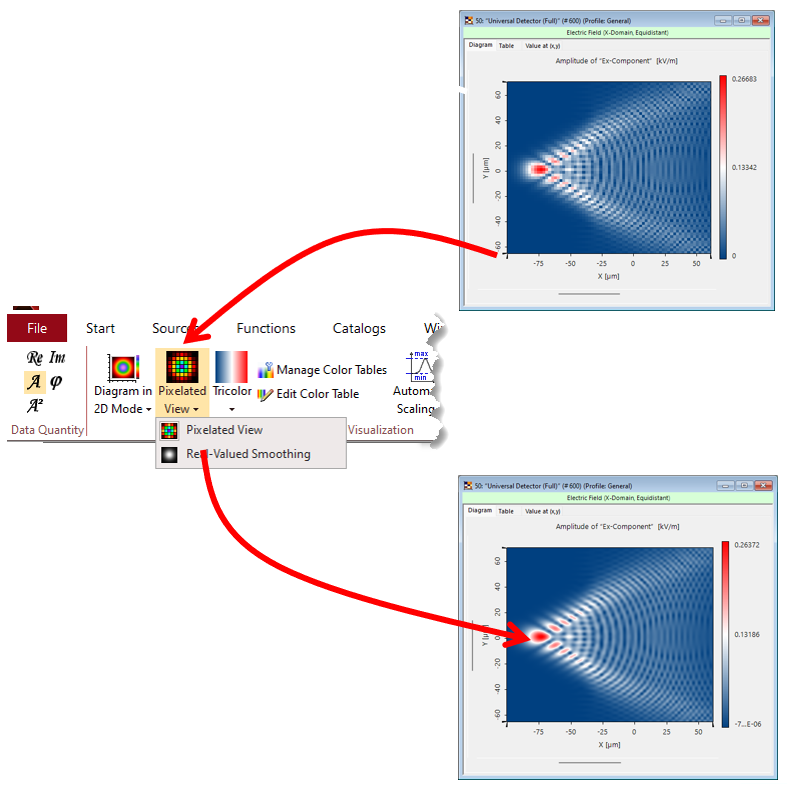
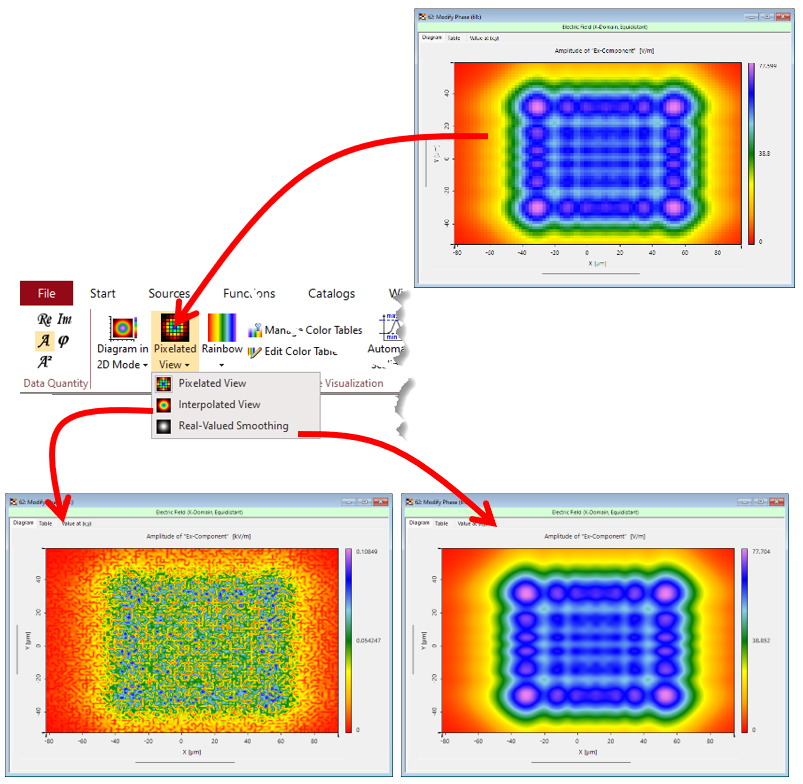
��x�h|<`>5 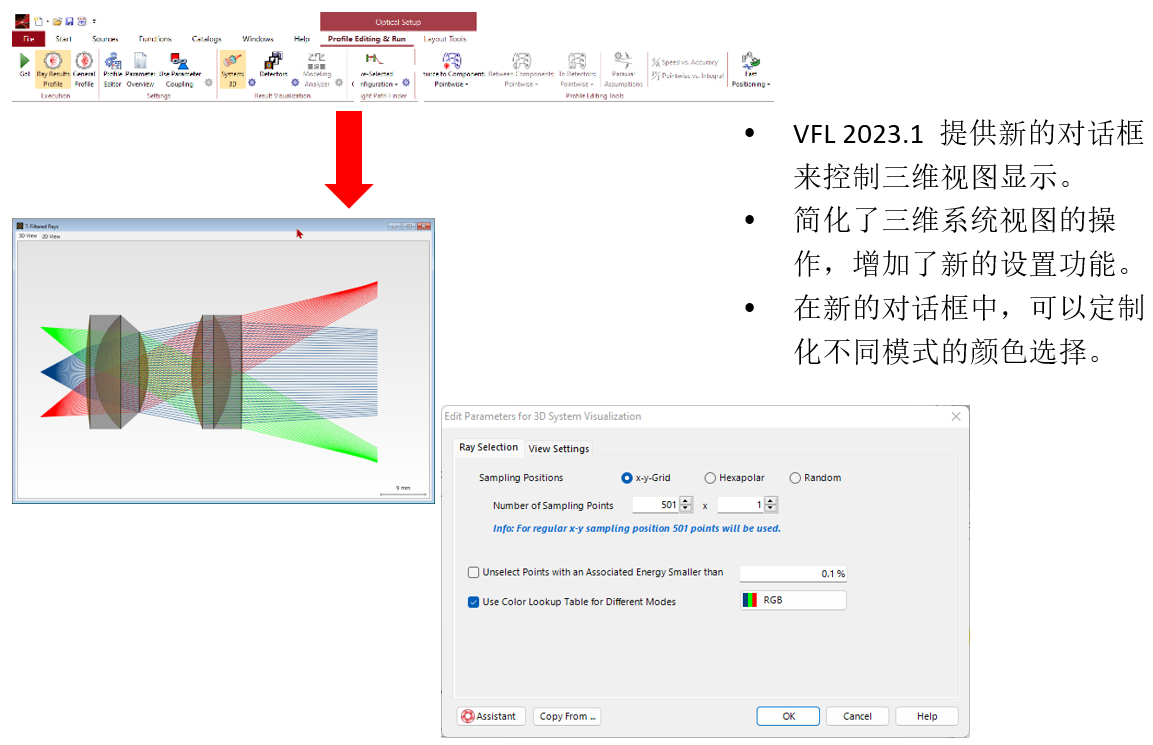 �`b?o%5V2x '4"c#kCKL� 数据阵列视图: 像素数据(Pixelated Data)平滑 !\Vc#dsl�t ��$Q�B/n63 • 探测器中的像素越少,探测器评估速度更快。 ~6P�v5DKq� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �*r(Qy0�(� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 ;(r�,;S_`0 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 {�u)>W@Lr�
�`b?o%5V2x '4"c#kCKL� 数据阵列视图: 像素数据(Pixelated Data)平滑 !\Vc#dsl�t ��$Q�B/n63 • 探测器中的像素越少,探测器评估速度更快。 ~6P�v5DKq� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �*r(Qy0�(� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 ;(r�,;S_`0 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 {�u)>W@Lr�
y�B2��}[�1
 ��{j[�a'Gb
��{j[�a'Gb
#G!\MYfQt
数据阵列视图: 像素数据(Pixelated Data)光滑化 mr2fN�A>kR
i#�bc�jH�
'|J~2r�byr
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 u�F<��}zFS
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 C��8t;E��`
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 _N��ac��qa
;:o�bg/;uJ
 W���:8pmI
W���:8pmI
�s(�(c�@)M
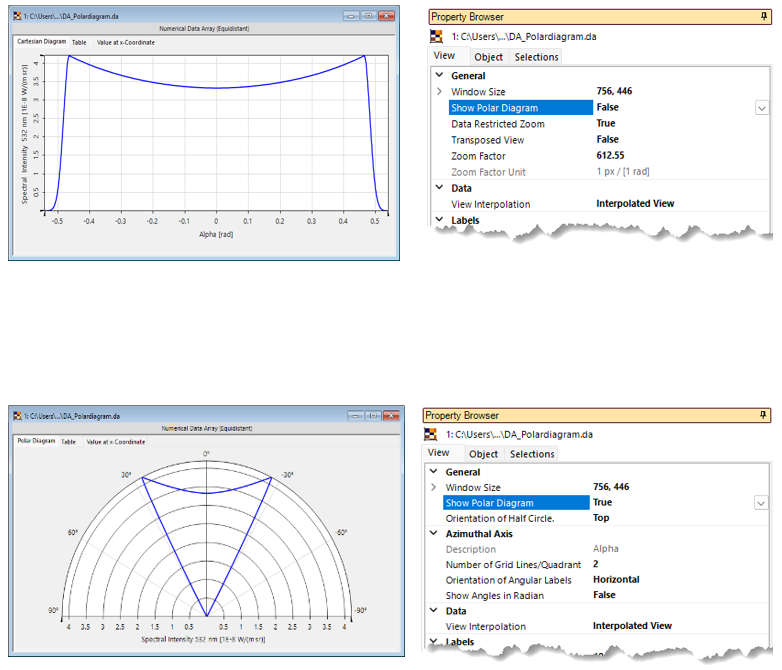
数据阵列视图: 极坐标图(Plolar Diagram) *�b8A�N3�!
H7%q[����O • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 �%sC�G}?
y • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 �w:a�V�2� • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 7_ �s�7�); • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 t�$z 5m<8�
�bJoP�@s�
 weC.k��x �
weC.k��x �
~�$d(@T�&
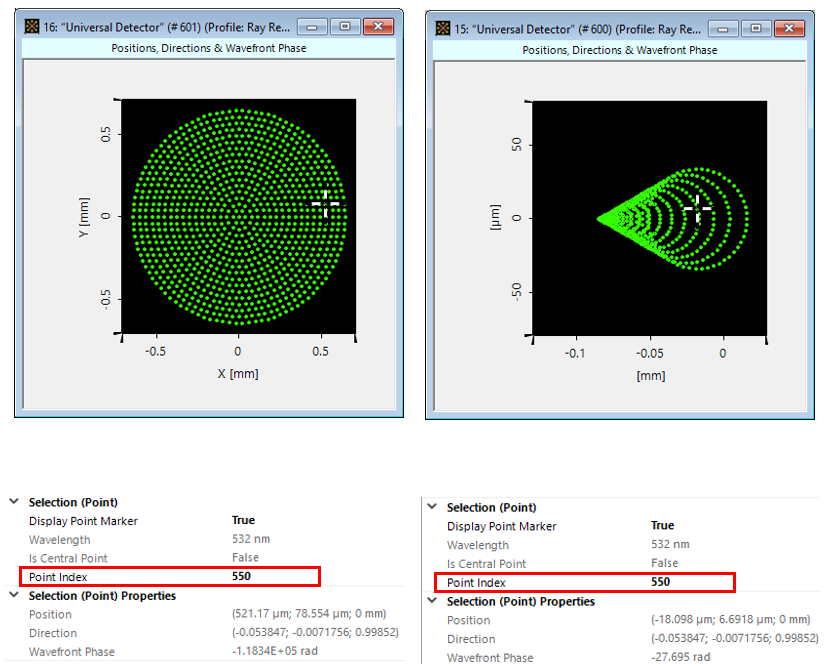
数据阵列视图:找寻以及点的标识 ftxy]N�L�F
��Esl�Hml#
;
,n}�>iTE
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 of8
>xvE�|
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 �unc8�WXW�
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 rT(b ��t~Z
`�*�",_RO;
 �V �5D�8�z
�V �5D�8�z
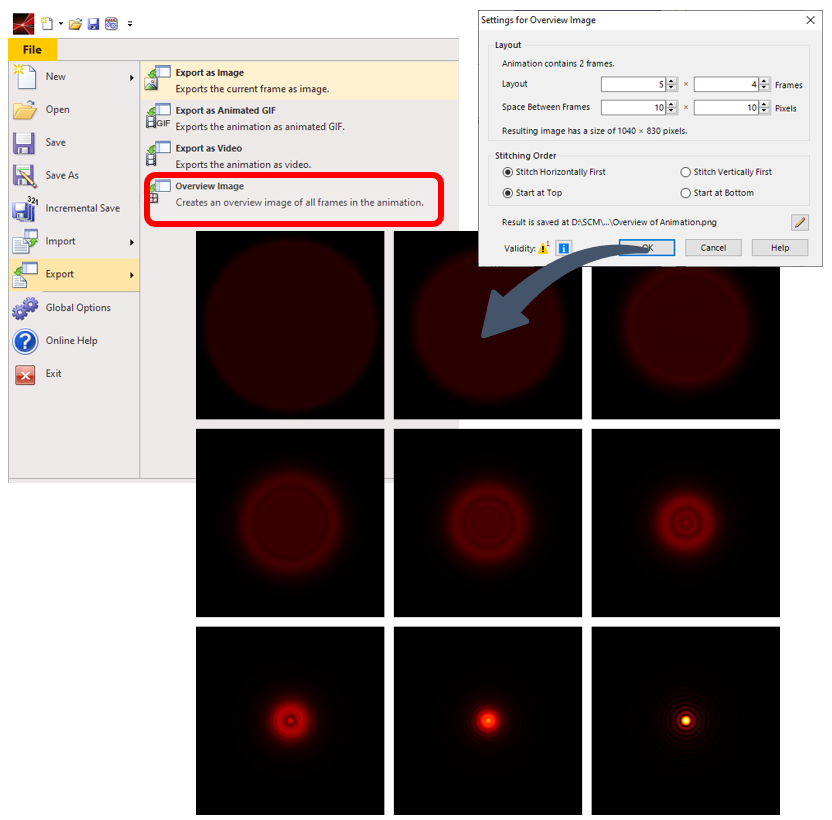
>S>B tR��l 导出图像的概览 Zu�/w[�*;M �bT1�5jN�a %>��!W+rO,
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 0�+�T:};]�
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 089v;
d �6
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 M��U:q`DRr wvR��wb���
 N\a�n�j��G
N\a�n�j��G
RQ;w$I\���
数据阵列视图: 更多的新功能 'x6rU"e�$J
ipyc�(u6Z5
SP"�t2L�TP
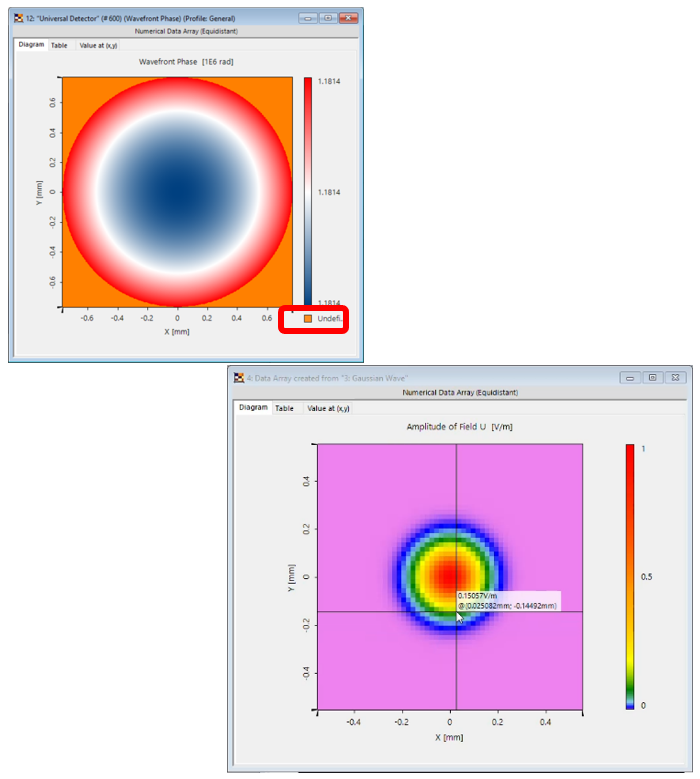
• VFL2023.1可以对未定义区域填充不同的颜色。 _�*ar\A`��
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 9[R+m3V�/`
=q}Z2 OoYh
 n�K�}-^�Ur
n�K�}-^�Ur
7%Ou6P$^fr
Graphics Add-ons提供更多数据视图选择 _Kbj���?j� �g�x8i|��] N}n�E?|N=5
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 '<���$*�N�
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 T:��SqE�NV
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 $�WX�O1o(O 6)c�-s��|# 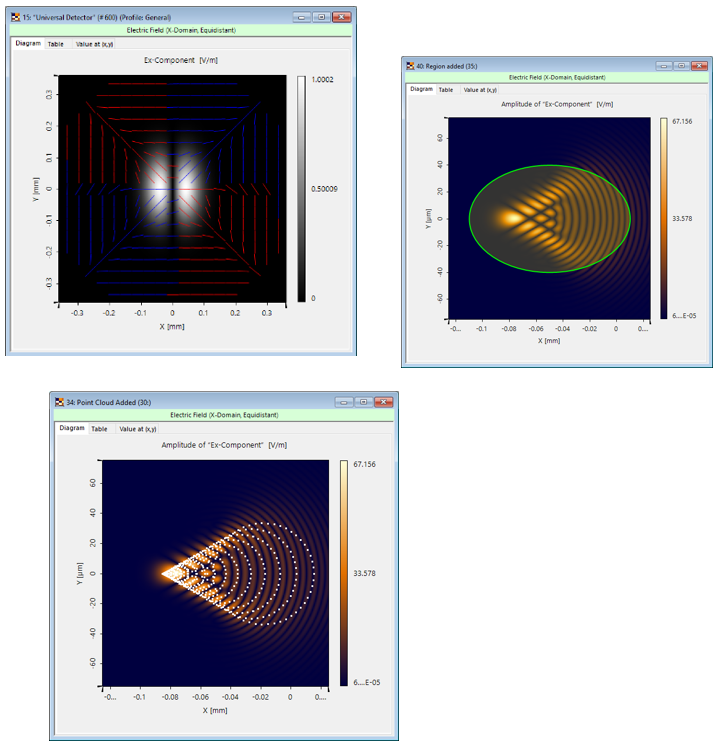 6�O_l;A[=1 ��s|I$c;>� _2�hZGC%&E Graphics Add-ons提供更多视图选择 U/�-�k'6=M "��RTv[n�!
6�O_l;A[=1 ��s|I$c;>� _2�hZGC%&E Graphics Add-ons提供更多视图选择 U/�-�k'6=M "��RTv[n�! • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
45k.U�$<|� • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
p�-xG&�C�U • 图像组件提供了多样化的配置选项。
~�n$�\[r�Q A7��6H�M@Q 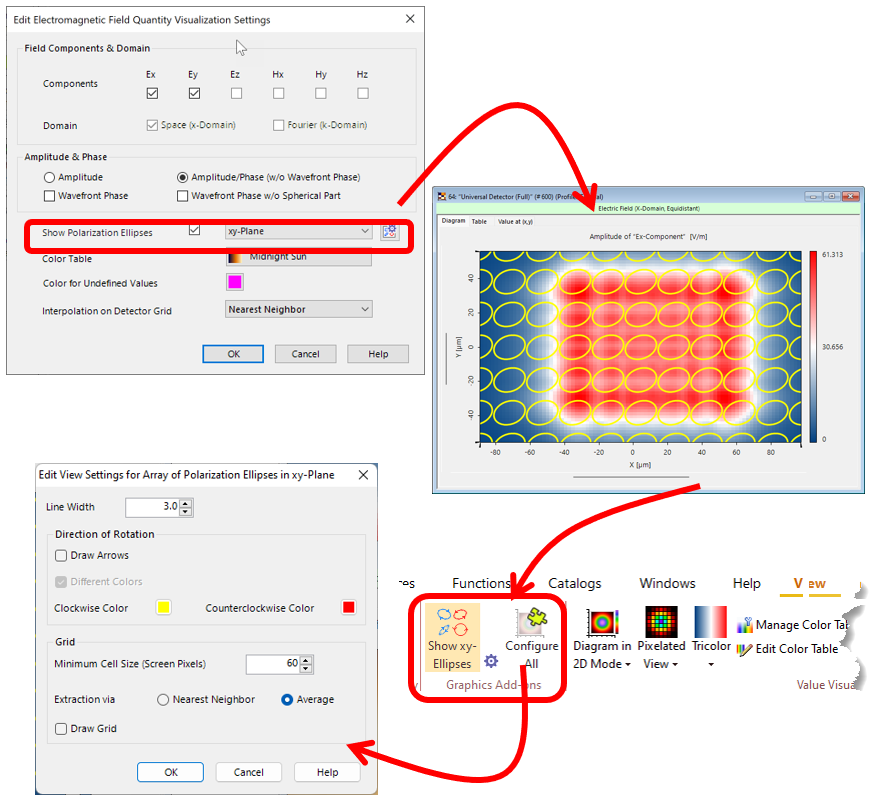 C3'?E�<F� D#A6s�3�2a 1��@i���/N Graphics Add-ons: 增加了 Point cloud 功能
�AH-BZ�8 �I��CiGZ'k .>�Qa�3,v5
C3'?E�<F� D#A6s�3�2a 1��@i���/N Graphics Add-ons: 增加了 Point cloud 功能
�AH-BZ�8 �I��CiGZ'k .>�Qa�3,v5 • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
�!h�jF"Pa� 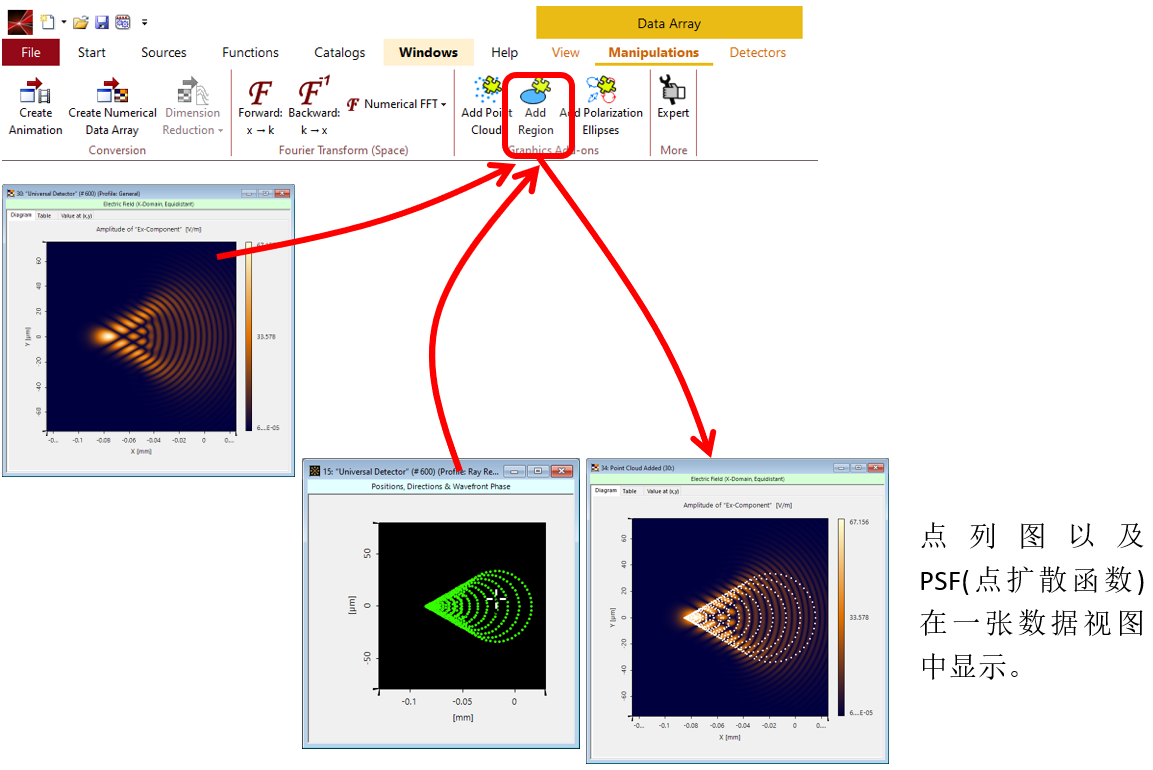 s
bd$.6
|& �M�:d��H�> VirtualLab中的区域 (Regions) #lO �^P�K� 7�Ck3L�6J# `�"o{MaFA�
s
bd$.6
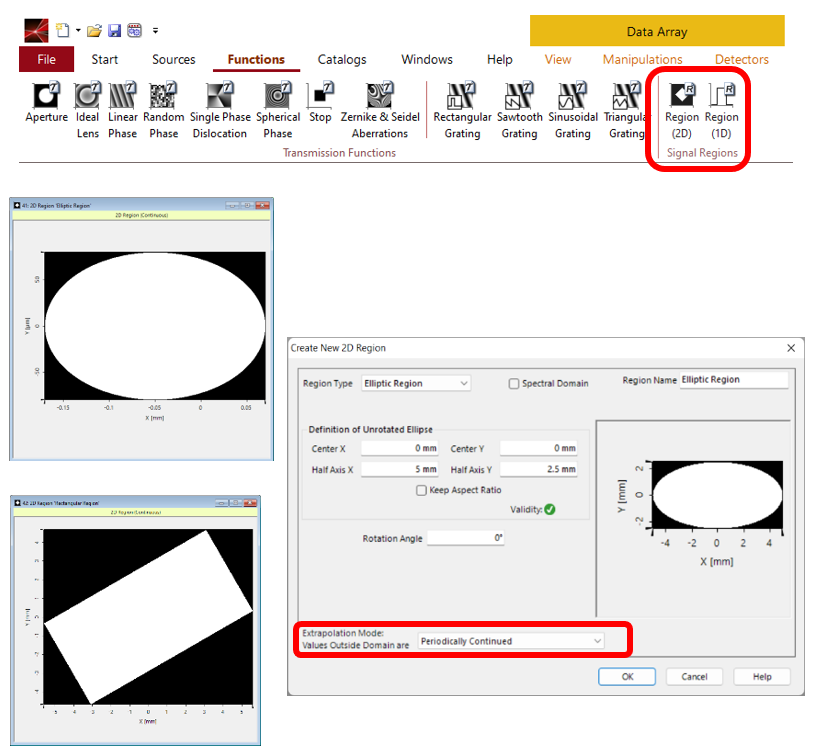
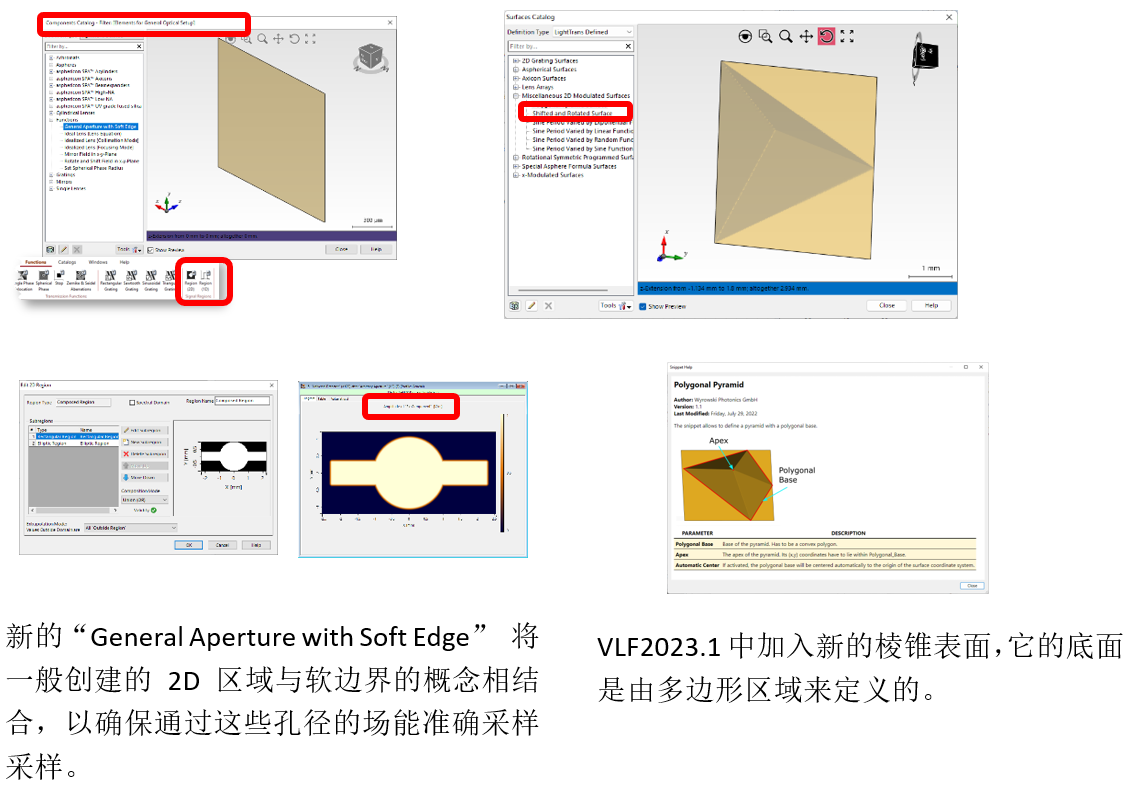
|& �M�:d��H�> VirtualLab中的区域 (Regions) #lO �^P�K� 7�Ck3L�6J# `�"o{MaFA� • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
�oJ�Q
\?~  dL_9/f�4 � 6��AoKuT;� �'j-U=�2,n Graphics Add-ons: 添加区域(Add Region) t1��NGs-S3 ?C- ju8]| DI�fQ~O+u�
dL_9/f�4 � 6��AoKuT;� �'j-U=�2,n Graphics Add-ons: 添加区域(Add Region) t1��NGs-S3 ?C- ju8]| DI�fQ~O+u� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
T0~��~0G)k 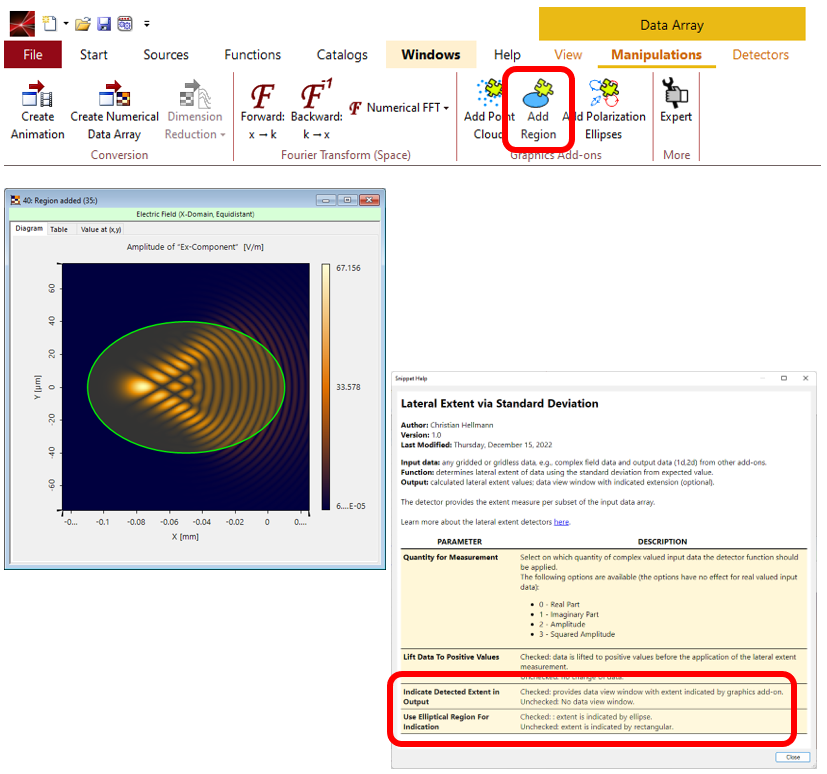 E]}��_�hZU :5BCW68le
E]}��_�hZU :5BCW68le 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
&;�~?\>�?I |o+*I��y)� Graphics Add-ons: 添加区域(Add Region) �T��Y%�=Y= y`�� {|D*� Kr[oP�3�� • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
`���<kB/T G�4rzx%W�? 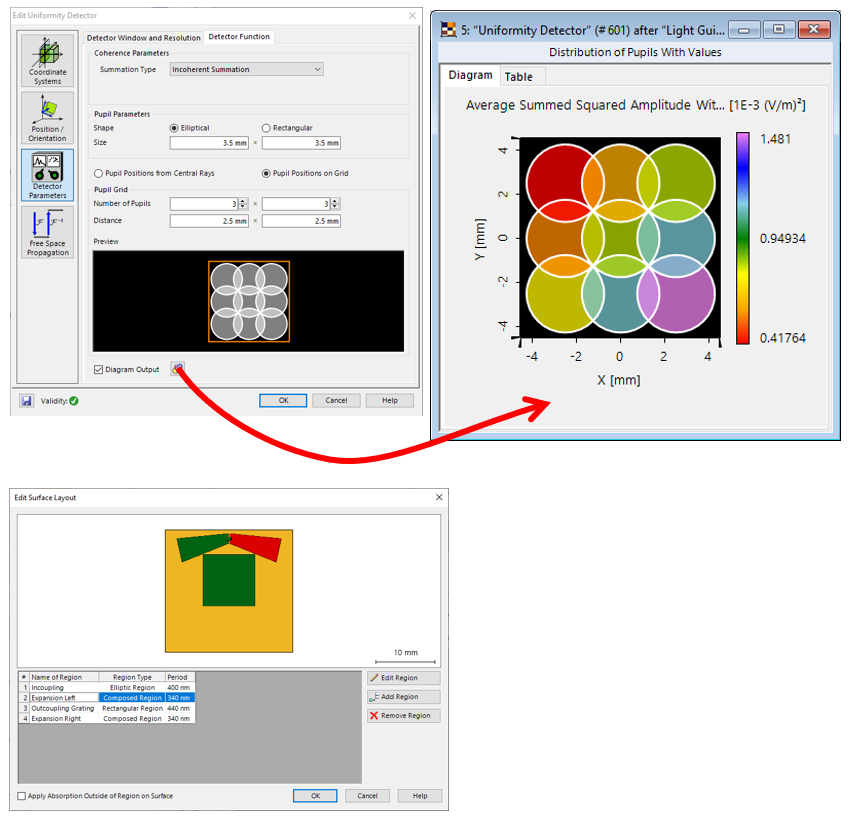 mi��.,Z`]o
mi��.,Z`]o • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 n/x(�(d%"E 0X��4)=sJP Y`#6M�hFT7 • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
'1(6@5tyWk • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
*nc3A�[B#C 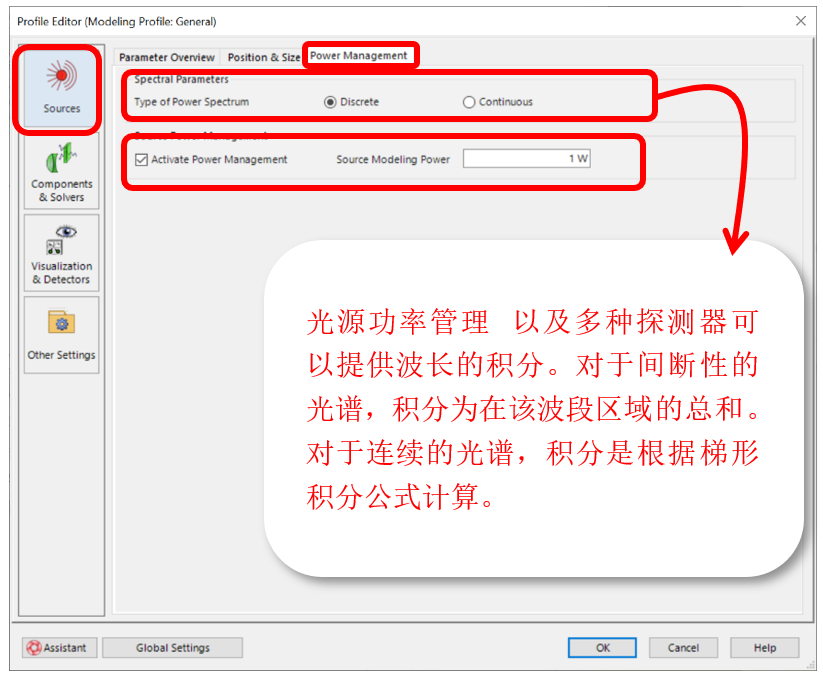 =�z]rZSq*o
=�z]rZSq*o • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
��Nukyvse� 1. 针对给定光源参数,进行光源功率的评估。
��rxqSi0p� 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
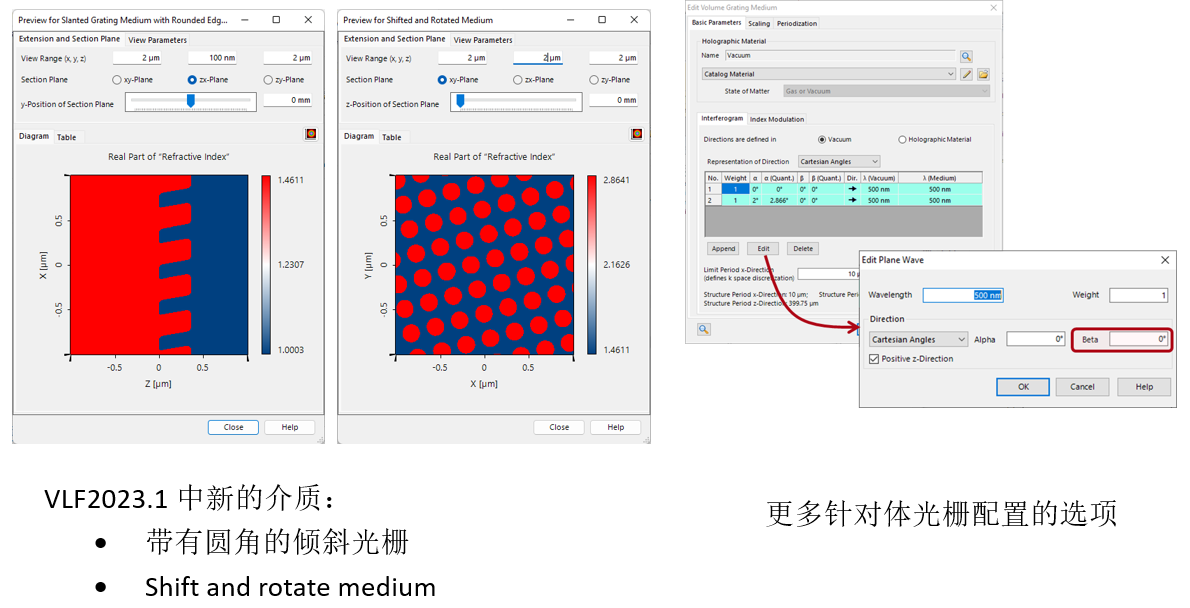
�E��-(�$Xc P�]T�T8Jgw 组件 �A7,%'�.k� 组件(Component)新的特征 �o�e��|8�� ;xiw�yfqgE |r�G)Q0H�, • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
00{a��}@n� 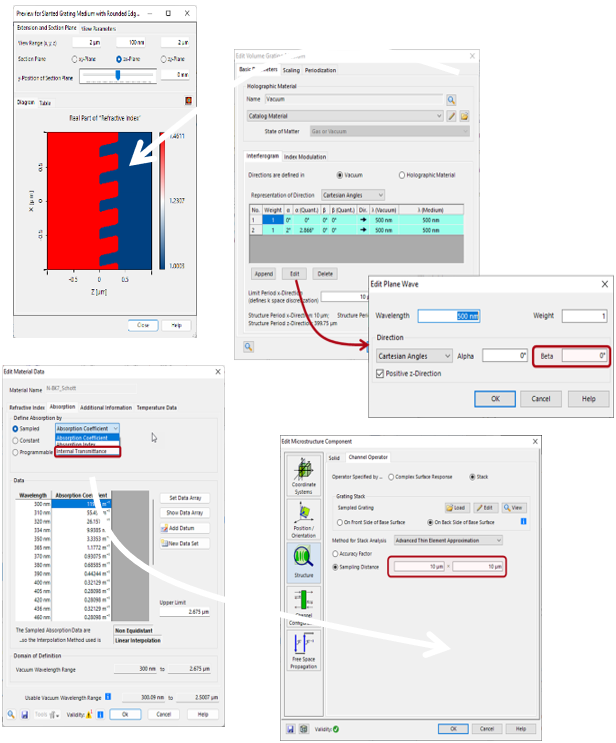 K&�zW+C��b %-$BtR�2@o 组件(Component)新的特征
�2W`WO�Bz
K&�zW+C��b %-$BtR�2@o 组件(Component)新的特征
�2W`WO�Bz
hlZ{bO�'f�
 T?QW$cU!e:
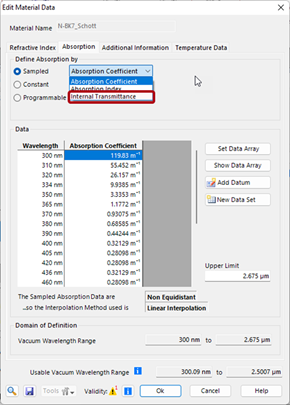
T?QW$cU!e: 吸收特性可以用采样数据定义吸收率以及透过率。
,RM8�D�)m\ �k14<E���/ 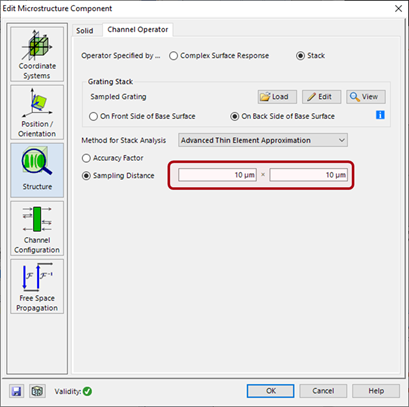 �u��{h6�7N tC(Ma����I
�u��{h6�7N tC(Ma����I 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
N�{~�P}�Sw oK
�7�:e~� 组件(Component)新的特征 TLp2a<I�y�
O9E:QN<U`*
 Vo+.s#wN`h ?qi~�8.<w� 组件(Component)新的特征 ����/!^�,+
Vo+.s#wN`h ?qi~�8.<w� 组件(Component)新的特征 ����/!^�,+
wu><a!3`=o
 93:oXyFj�D \uZ|2�WG` 组件(Component)新的特征 -*�R�f [|Z
93:oXyFj�D \uZ|2�WG` 组件(Component)新的特征 -*�R�f [|Z
�?Z_T3/� f
 _ �E-\a�S{ TnKv)�%V�F �LMx���/0�
_ �E-\a�S{ TnKv)�%V�F �LMx���/0� 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
bJ�2>@|3*� 处理日志 lS#:��u-k vd(S&&]�o1 扩充版的处理日志 �X 6���t�J �d�QZ��dL4 ~*"ZF-c��, • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
('�Qq"cn#� 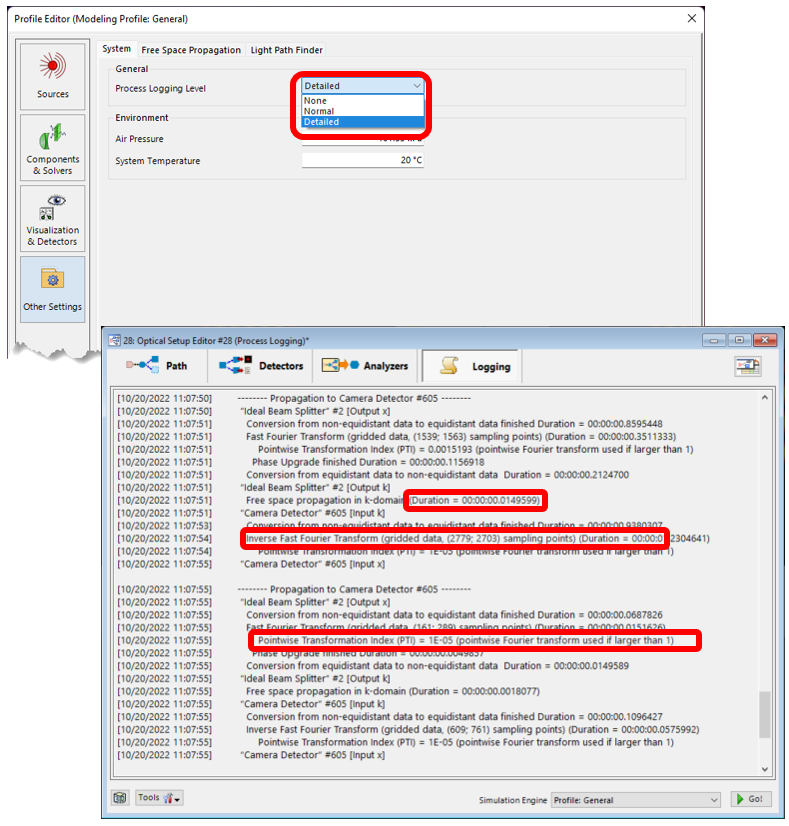 \Vroz=I�T: �h#�KSKKNW 系统仿真分析 c61OT@dZEA F[S�ZwMf29
\Vroz=I�T: �h#�KSKKNW 系统仿真分析 c61OT@dZEA F[S�ZwMf29 • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
|JF�,n��~n 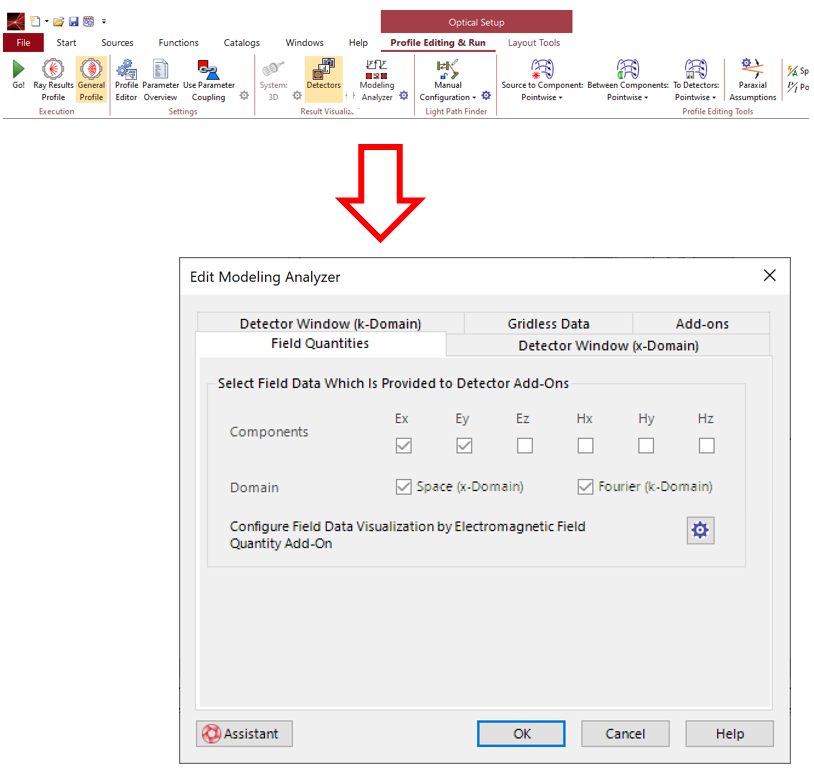 U�.��_fb= `��e~i<P�i 专家模式(Expert Modus) �Du6�5>��O 2�4k�]X`/n 专家模式中的数据阵列’Manipulations’ A%?c1`ZxF� r5ldK?=k+* %8|lAMTY7/
U�.��_fb= `��e~i<P�i 专家模式(Expert Modus) �Du6�5>��O 2�4k�]X`/n 专家模式中的数据阵列’Manipulations’ A%?c1`ZxF� r5ldK?=k+* %8|lAMTY7/ • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
�t�&Eiz�H$ 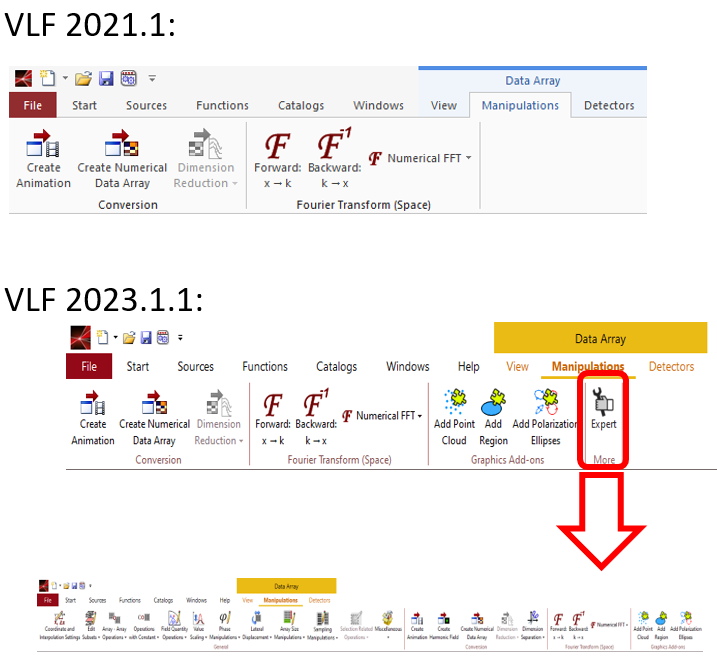 +])��<}S!M CH��Z/@gc 微小的改进帮助:新的计算器 ~��tyqvHC wpt�$bqs|1 @&`�^#�pok
+])��<}S!M CH��Z/@gc 微小的改进帮助:新的计算器 ~��tyqvHC wpt�$bqs|1 @&`�^#�pok • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
R9 �Ab�.t� 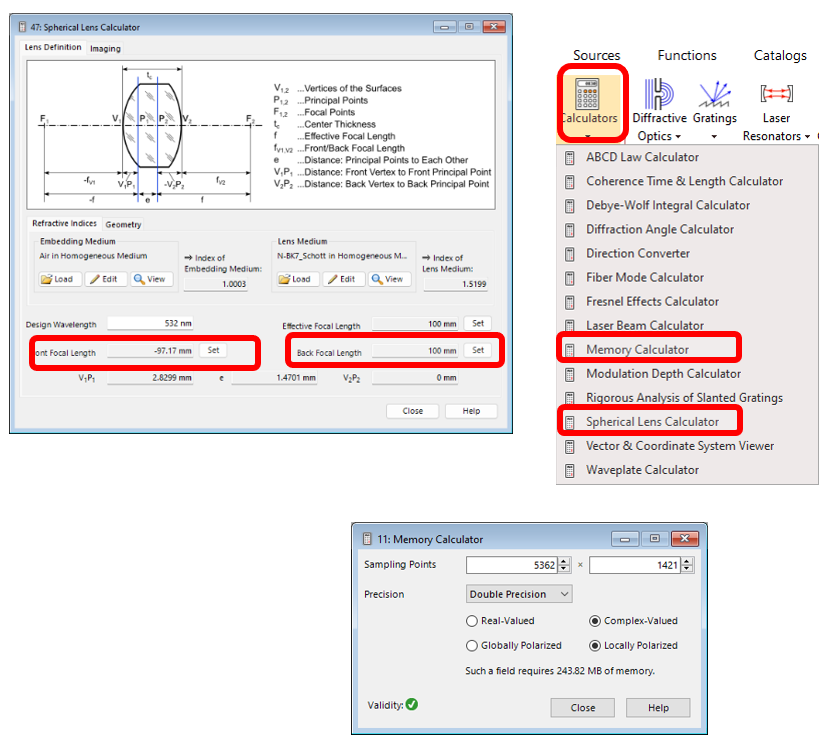 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



