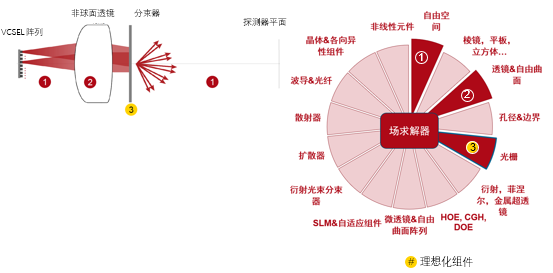
F7C+uG�Ts� 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
��9
�AD*�� f�Ge��ie m 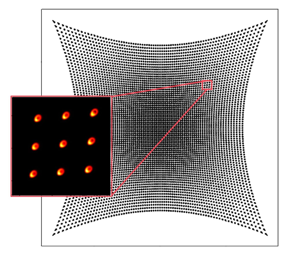 �3%9XJ]Qao 建模任务 �u{uqK7]+� Es}`�S�Ie/
�3%9XJ]Qao 建模任务 �u{uqK7]+� Es}`�S�Ie/ 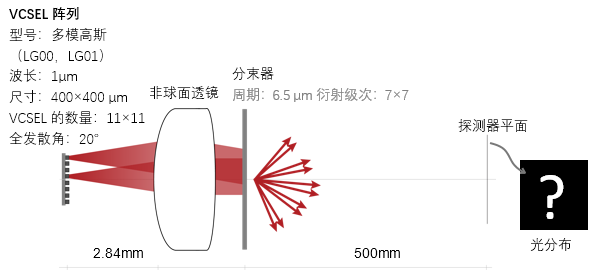 X�l<�*Fn?� %?�V~7tHm>
X�l<�*Fn?� %?�V~7tHm> *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
P�yI"B96gz ��5.\|*+E~ 光源建模 )xU+M{p-os B)DuikV.D� 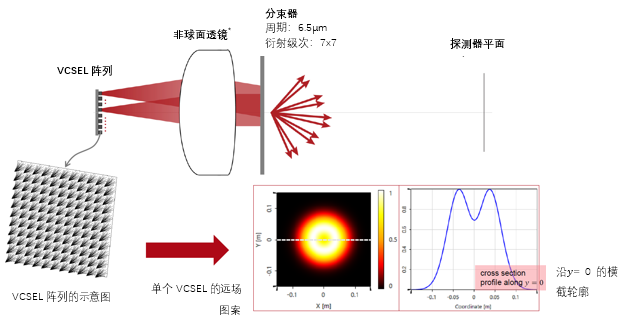 :�/Pxf�N�5 |u��l�{d|� 轴上VCSEL单元的仿真 N?r�E�:0SJ �[C-FJ�>=S
:�/Pxf�N�5 |u��l�{d|� 轴上VCSEL单元的仿真 N?r�E�:0SJ �[C-FJ�>=S 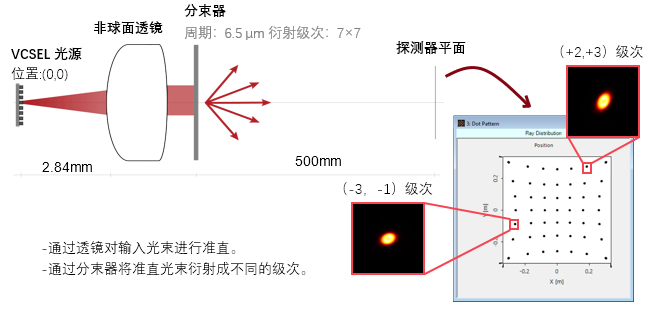 PQ_A^��9�5 L"1�AC&~�u 离轴VCSEL单元的仿真 I�t2:�2�� UT�{`'#�iT
PQ_A^��9�5 L"1�AC&~�u 离轴VCSEL单元的仿真 I�t2:�2�� UT�{`'#�iT 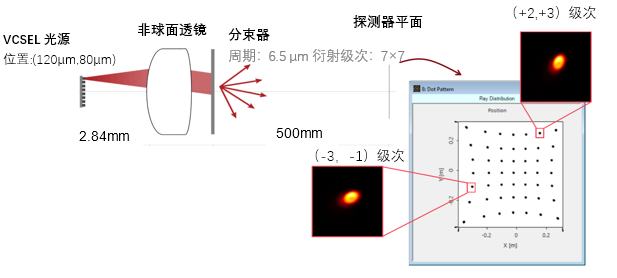 �;=P!fvHk �9k9}57m.i
�;=P!fvHk �9k9}57m.i -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
'?I3�&lYz{ -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
}vP��(SF�6 �H�^o_��B1 完整VCSEL阵列的仿真 #t� Pc<p6m F�nOa�h�LS 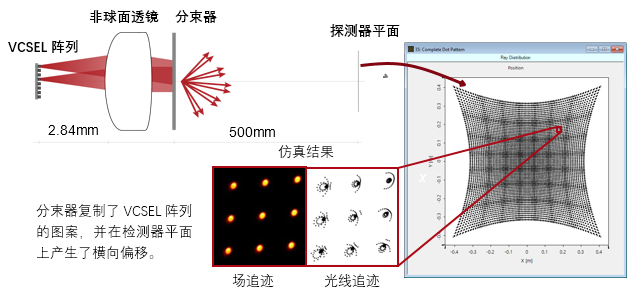 1�)97AkN(O e+#�k�\x � VirtualLab Fusion一瞥 B�y[M|�4a� _'y`hK�eI[
1�)97AkN(O e+#�k�\x � VirtualLab Fusion一瞥 B�y[M|�4a� _'y`hK�eI[ 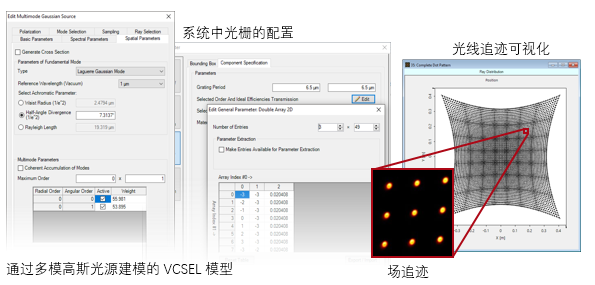 ,b��M��)�: �+,7v��bs3 VirtualLab Fusion中的工作流程 Fku<|1}&y� NyC�&�j�`d
,b��M��)�: �+,7v��bs3 VirtualLab Fusion中的工作流程 Fku<|1}&y� NyC�&�j�`d •设置多模信号源
=_N���$0 �?��c"i��V •设置组件的位置和方向
?�%lto�ezf �S�1~EJa5H •在
光学系统内配置光栅组件
�+S#Xm��4 i�nq
{" 6� •参数运行的配置
M.qv'zV`xG NTK�9�`#SA f#I#2�4)RH 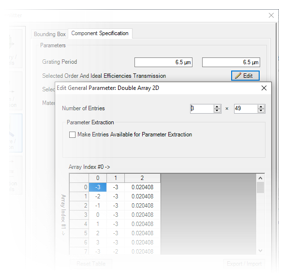 Wzf�f��p}V %��<O�~eXY VirtualLab Fusion技术 ]�M��"U 'Z D^s#pOZS��
Wzf�f��p}V %��<O�~eXY VirtualLab Fusion技术 ]�M��"U 'Z D^s#pOZS��