像
光栅这样的
光学设备对光的偏振比较敏感。 因此,在
仿真中适当考虑光的偏振非常重要。 在实际中,光栅有时会以非偏振光作为输入。 作为两个正交偏振态的平均值,我们为您展示了如何在VirtualLab Fusion中建模这种用于光栅仿真的非偏振光。 为此,我们提供了示例来说明
软件中的相应设置。
Df(+@��L5! �iorQ��/( 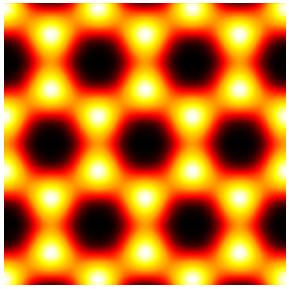 ��K]dR�%j �REsw�=P!b 光栅仿真中的非偏振光 �]Q�p-$)�N
��K]dR�%j �REsw�=P!b 光栅仿真中的非偏振光 �]Q�p-$)�N •光栅分析
~9;ud�BfwF −对于使用傅立叶模态方法(FMM / RCWA)的单光栅分析,使用平面波入射来计算
yi�(���IIW 例如:作为被研究光栅固有特性的
衍射效率。
wMCgL�h\wi P9�q=tC3^� •非偏振平面波
''z]o#=�^9 −考虑到沿z方向的平面波,可以将非偏振光视为同一时间可以处于任何偏振态。
�)N\�B��C −任意偏振态可以沿两个正交基底
投影,并且统计上,非偏振光沿两个正交基底给出相等的投影。
��h2?�\A%� −因此,我们可以使用两个正交状态的平均值,并以非相干方式表示非偏振光。
[ThAv�Q�_$ uy�<b5.!-� 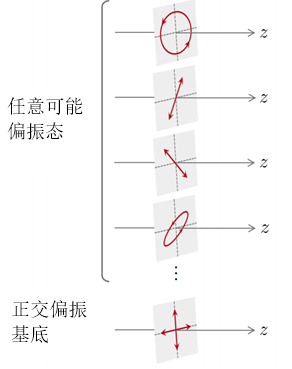 @�,W5K$Ka= :<5jlp�V(� 光栅仿真中的光源设置 :j/�sTO=��
@�,W5K$Ka= :<5jlp�V(� 光栅仿真中的光源设置 :j/�sTO=�� •手动控制光源偏振态
�h�Vd_1|/X −在VirtualLab Fusion中,光始终以矢量形式表示,并且可以完全控制光源设置中的偏振态。
�P1Iy�>�%3 −按照基本概念,可以根据非偏振光的需要,以特定的输入偏振态执行光栅仿真。 例如,通过选择TE和TM偏振作为两个正交基,分别执行光栅仿真,然后通过功能区菜单功能手动平均结果。
M�vaX>n�!o u1.��0-�Y?  q��{f (�T\ cXY��E�!�( 光栅仿真中的偏振相关分析器 w2�lO[o~x}
q��{f (�T\ cXY��E�!�( 光栅仿真中的偏振相关分析器 w2�lO[o~x} •光栅偏振分析器
l2Rn�yb<;; −为计算光栅衍射效率,VirtualLab Fusion提供了偏振分析器,用于研究偏振相关效应。
{�yd(n_PqY −偏振分析器,例如:光栅级次分析器对入射的偏振态具有额外控制。
}-9 ��c1&m −偏振分析器中的偏振设置独立于光学装置中的光源设置。
VA�q�Z�`y� �::cI�4D�� 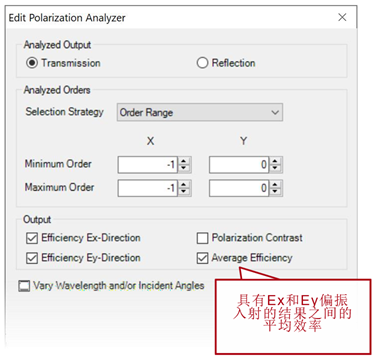 Z=a�~�0&�G h�$%h w+"4 实例1:使用非偏振紫外光的Talbot图像 nm�%7�e!{m �Z4gn7
'�V 建模任务 Kt/:ca���D �;(K"�w*��
Z=a�~�0&�G h�$%h w+"4 实例1:使用非偏振紫外光的Talbot图像 nm�%7�e!{m �Z4gn7
'�V 建模任务 Kt/:ca���D �;(K"�w*�� 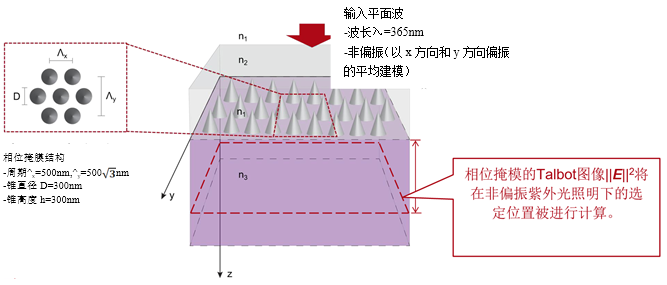 2a� �7"~z~ L�n�q� CHe >CH�b;*U�� oc[z� dI�k 在特定位置检测的场 6X4��r2V�q # 00?]6`�z
2a� �7"~z~ L�n�q� CHe >CH�b;*U�� oc[z� dI�k 在特定位置检测的场 6X4��r2V�q # 00?]6`�z 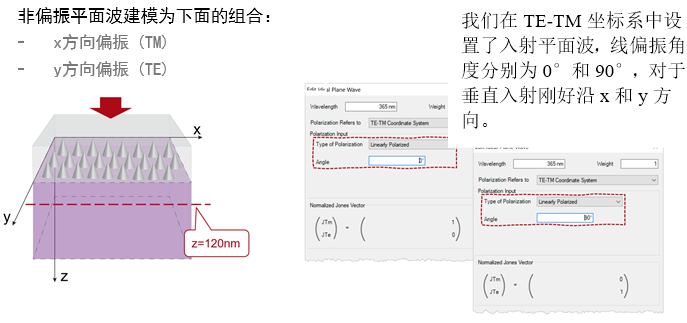 U��% ?�+�N 在特定位置检测的场 )/2TU]�/�/ 4�jjo��%�N
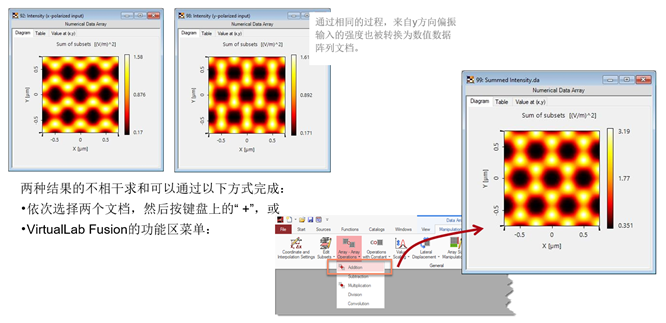
U��% ?�+�N 在特定位置检测的场 )/2TU]�/�/ 4�jjo��%�N  M(^ e)7a1 �l?L�s=�J* 非相干求和 s;�sr(34�
M(^ e)7a1 �l?L�s=�J* 非相干求和 s;�sr(34�
•两个线性偏振输入
光束的结果可以通过功能区菜单功能来完成非相干求和。
VS_I'SPPIc •为了进行非相干求和,应将强度数据转换为数值数据
阵列文件。
�0E�{D�O<~ o�/=6�1K8D 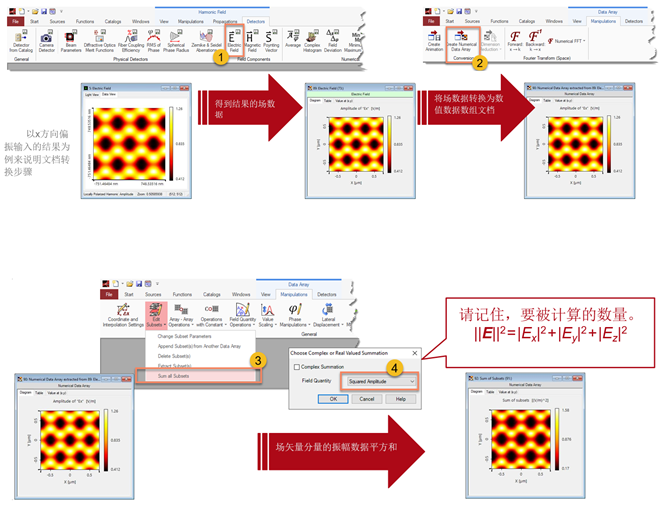 n��AX/�u�[ Q�6N?cQtOT 非相干求和 \vS >��j�B
n��AX/�u�[ Q�6N?cQtOT 非相干求和 \vS >��j�B
VM;v�LUu!e
 �6(�E��R�$ ����;w._�/ 正交偏振态的选择 ,&Vi��r�)S I�\I�D��t~
�6(�E��R�$ ����;w._�/ 正交偏振态的选择 ,&Vi��r�)S I�\I�D��t~ 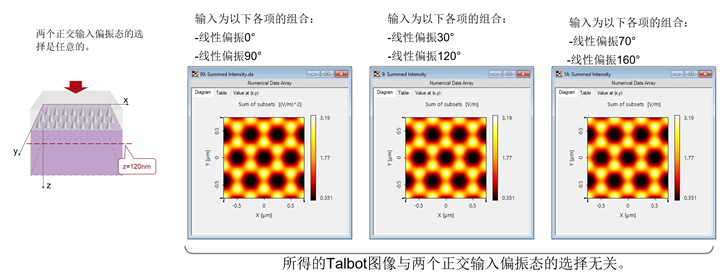 ��OA�gZeK$ xo�kA_3,1F 实例2:偏振不相关透射光栅的分析 ^}J,;�Zhu5 建模任务 HLL=.�:��P ~Qf\�DTM&�
��OA�gZeK$ xo�kA_3,1F 实例2:偏振不相关透射光栅的分析 ^}J,;�Zhu5 建模任务 HLL=.�:��P ~Qf\�DTM&� 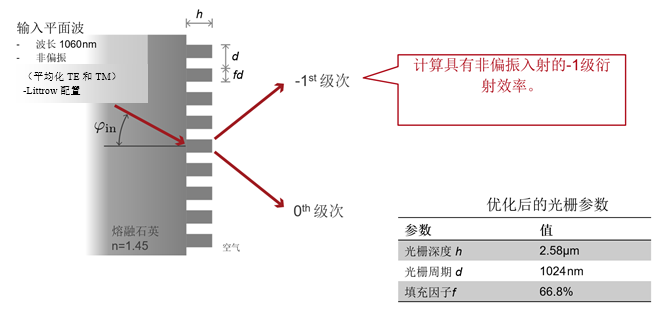 I�<Mb�/!TQ lc]��cs� D _�c(h{��dn 4RH>i+)pS\ 光栅偏振分析仪 �P5GV9�S�A Z�t9l��d=T
I�<Mb�/!TQ lc]��cs� D _�c(h{��dn 4RH>i+)pS\ 光栅偏振分析仪 �P5GV9�S�A Z�t9l��d=T 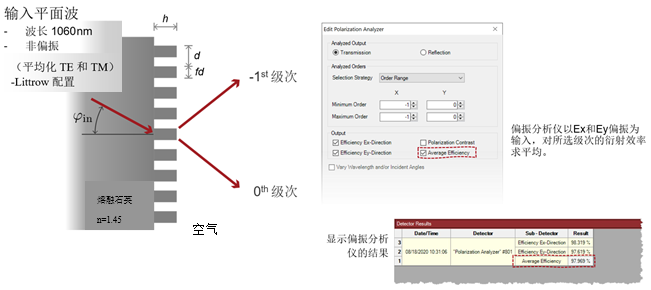 (aq-aum-�I :z%Zur+n c
(aq-aum-�I :z%Zur+n c



