微
透镜阵列在数字投影仪、
光学扩散器、三维
成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。
VyGJ=[ �]� $��iz�|\m�  @f_+=}|dc� ,�zY$8y��] 微透镜阵列的结构配置 :9 ^*
^T�� ��1|w�L\I
@f_+=}|dc� ,�zY$8y��] 微透镜阵列的结构配置 :9 ^*
^T�� ��1|w�L\I 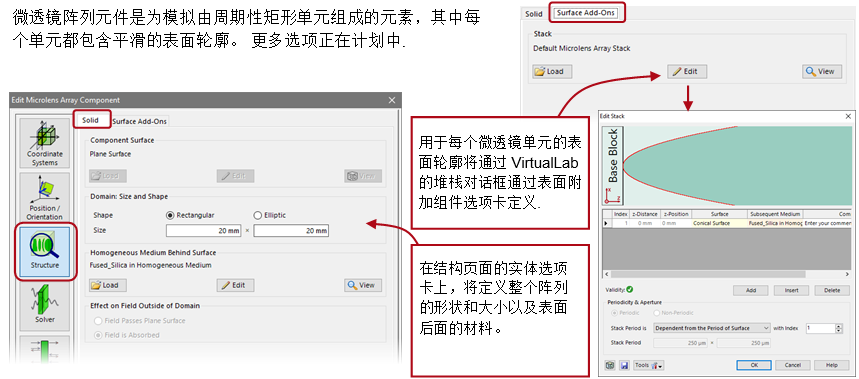 6�!FQzFCZq pyvS�wD5t 场通过哪一种方法通过MLA传播? C;ur��Bs�C *;*r�8[U}q
6�!FQzFCZq pyvS�wD5t 场通过哪一种方法通过MLA传播? C;ur��Bs�C *;*r�8[U}q 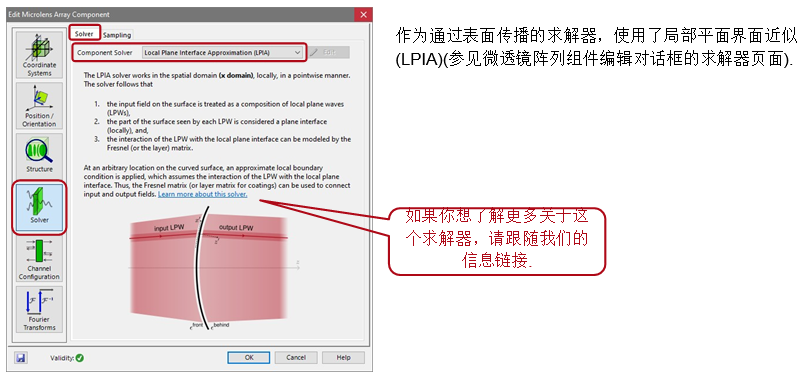 \)�|hogI|f U�4�B(�#2' 子通道分解 Ph>�%7M�%� ZJs$S�T�J*
\)�|hogI|f U�4�B(�#2' 子通道分解 Ph>�%7M�%� ZJs$S�T�J* • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续
系统进行进一步处理,然后所有场被适当地放在一起(b) .
V�~�5jfc�d • 子通道
模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。
Q'0d~�6n&{ 例如 微透镜的数量,表面变化的强度,
~$?ZK]YOrx • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。
}pu27F�)�& • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡.
@MCg%A��fw 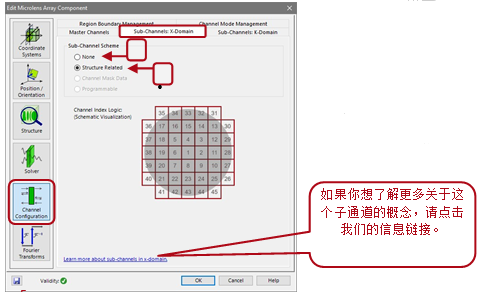 �`W*U��4?M '."ed%=M�C z' >�_M�c6 ��kPLxEwl� 子通道评估 /I0�%Z+`=� y
h��9�*z3
�`W*U��4?M '."ed%=M�C z' >�_M�c6 ��kPLxEwl� 子通道评估 /I0�%Z+`=� y
h��9�*z3 • VirtualLab Fusion还可以分别评估每个微透镜的结果.
@I!0-�Oj�L �FJ���P-y5 • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择.
S|`o]?�nc> e*�*qF=HCw 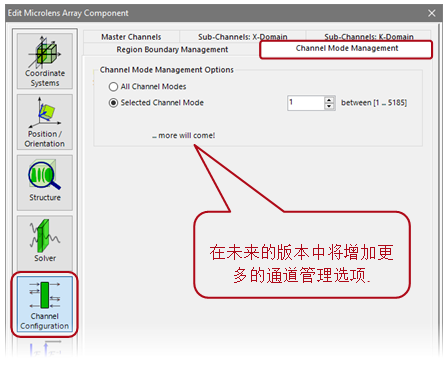 [u�*�5�z.^ <W�$mj04�@ 近场评估探测器的定位 ,�DkNL��E W:L
A�P�
R
[u�*�5�z.^ <W�$mj04�@ 近场评估探测器的定位 ,�DkNL��E W:L
A�P�
R 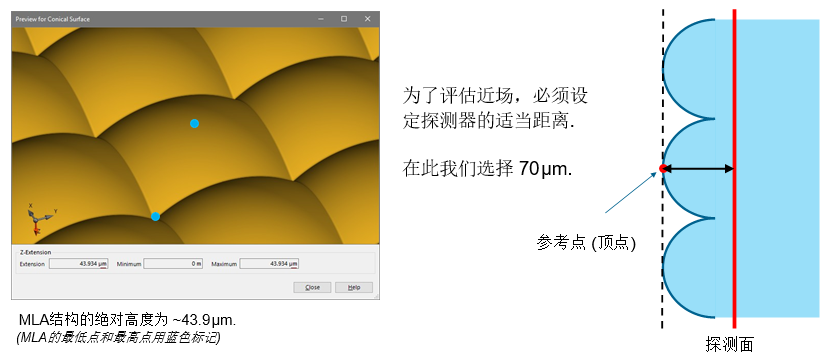 Q$@I"V&�G. y_lU=(%�Jd 区域边界管理 Ycp��oL@ab jtc�]>]�6i
Q$@I"V&�G. y_lU=(%�Jd 区域边界管理 Ycp��oL@ab jtc�]>]�6i 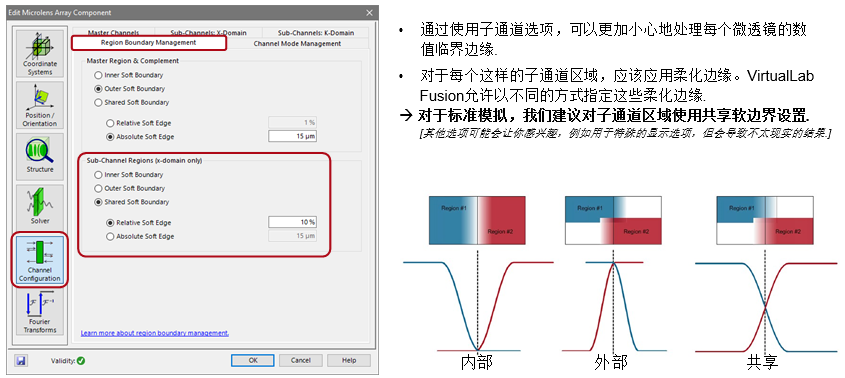 81Z)� �eO# !d�0kV,F:� 场景演示 v^ �V�itLC �hx]?&z�T@ 演示示例的配置 SNI)9k(�T{ ��E�0�9�:E
81Z)� �eO# !d�0kV,F:� 场景演示 v^ �V�itLC �hx]?&z�T@ 演示示例的配置 SNI)9k(�T{ ��E�0�9�:E 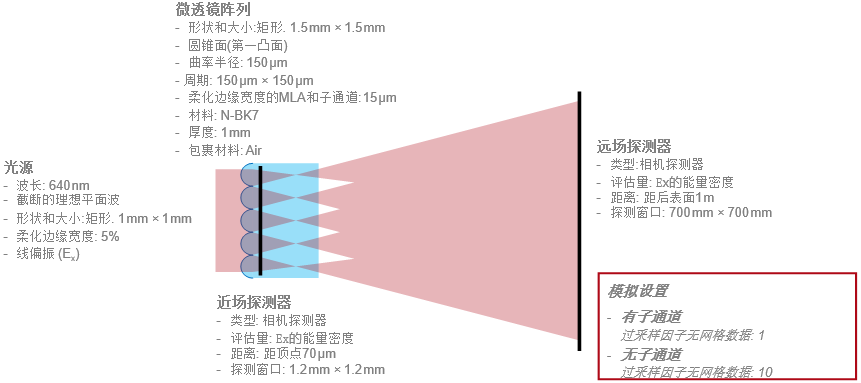 ut7�zVp<"� ^3�L0w�}�# 光线追迹结果: 综述 v,�>Dbx�n �I4i>+:_J�
ut7�zVp<"� ^3�L0w�}�# 光线追迹结果: 综述 v,�>Dbx�n �I4i>+:_J� 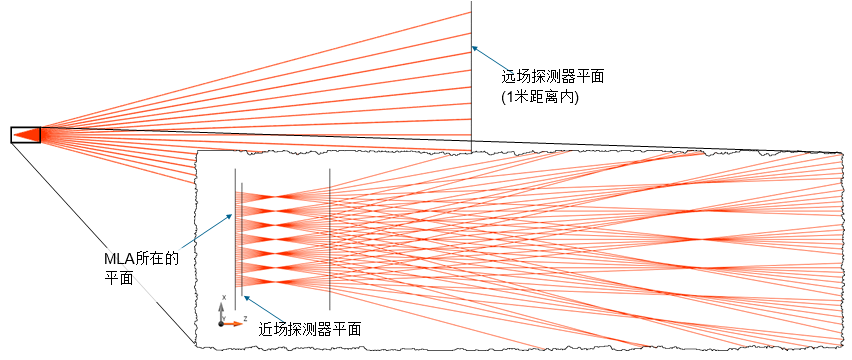 j+��
�0I-p o�:Sa,
!DK 光线追迹结果: 远场 %M|hA#04vZ �j �HJ`,#�
j+��
�0I-p o�:Sa,
!DK 光线追迹结果: 远场 %M|hA#04vZ �j �HJ`,#� 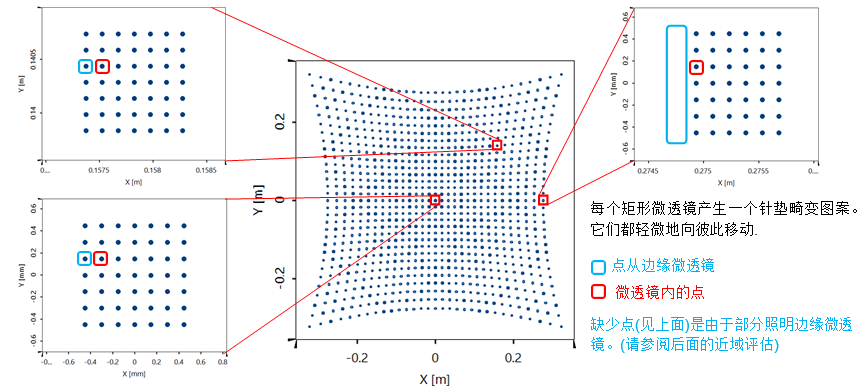 �?+}�_1x�` eV?2Lt�T#5 场追迹结果: 近场的能量密度 2!=�f �hN� O[�JL+g4�
�?+}�_1x�` eV?2Lt�T#5 场追迹结果: 近场的能量密度 2!=�f �hN� O[�JL+g4�
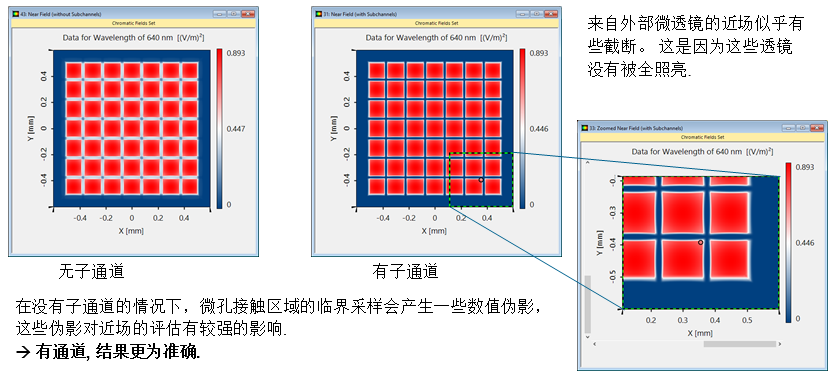 l]l'4@1 �� .5ha}=��z 场追迹结果: 远场的能量密度 n]o�<S�+�z q6V>��zi�
l]l'4@1 �� .5ha}=��z 场追迹结果: 远场的能量密度 n]o�<S�+�z q6V>��zi� 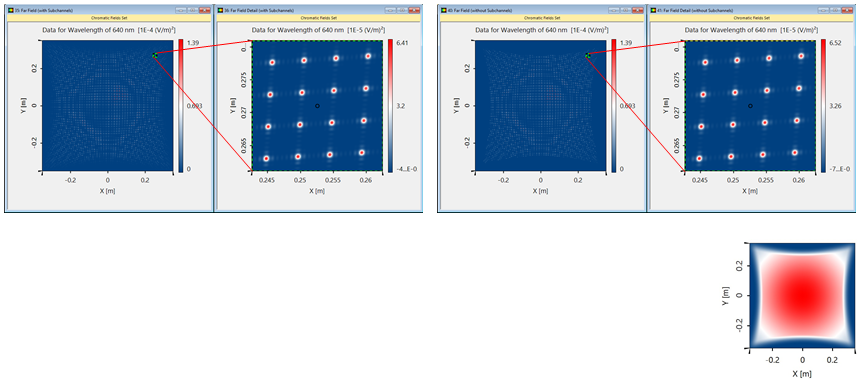 )�
ah���A[ sN01rtB(UT
)�
ah���A[ sN01rtB(UT 在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的:
fH�d#u%63K D�7Q$R:6| 带有子通道的
仿真时间: ~70 s
pJ�'"j �6Q 无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10)



