微
透镜阵列在数字投影仪、
光学扩散器、三维
成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。
e���<�Pbsj l,(M�m��,3  ?$:;hGO.<~ ��,sU#{.�( 微透镜阵列的结构配置 �5�|�I�2�� v�O2I"Y*�\
?$:;hGO.<~ ��,sU#{.�( 微透镜阵列的结构配置 �5�|�I�2�� v�O2I"Y*�\ 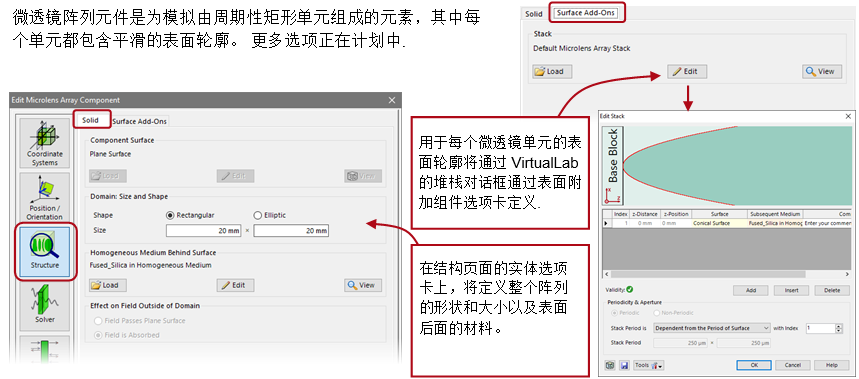 ��@%8X�a7+ OB-2�x�mZW 场通过哪一种方法通过MLA传播? ��c_o�I?D9 k{fTq�KS%h
��@%8X�a7+ OB-2�x�mZW 场通过哪一种方法通过MLA传播? ��c_o�I?D9 k{fTq�KS%h 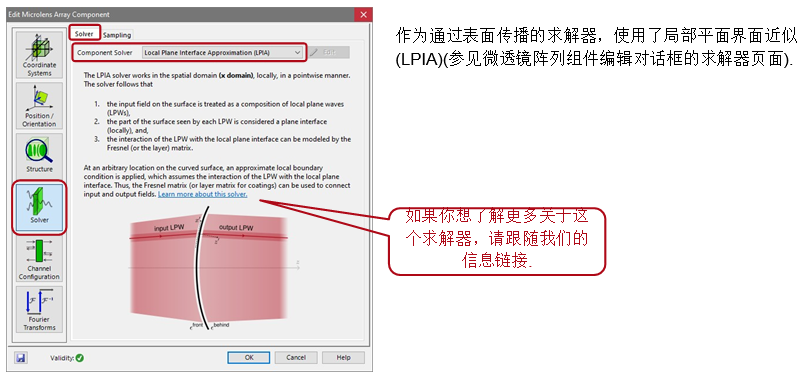 �aq�a%B��� ^4D7s�S;~3 子通道分解 }M9R5�!�=q ��Q"�2t�:�
�aq�a%B��� ^4D7s�S;~3 子通道分解 }M9R5�!�=q ��Q"�2t�:� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续
系统进行进一步处理,然后所有场被适当地放在一起(b) .
KZK9|�12�1 • 子通道
模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。
�fevL�u[,� 例如 微透镜的数量,表面变化的强度,
}4�
p3m]�� • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。
W`$D*�X0*o • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡.
v&.`^��O3W 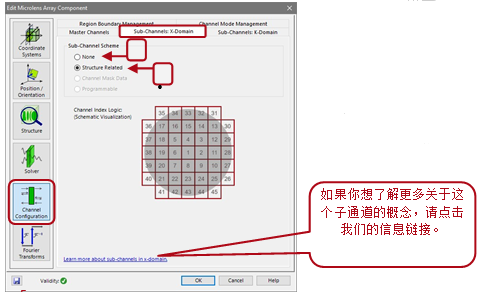 1Tn0$+�$.4 H*SEzV��b� �8UA�bTqB- %&D,|�Yl�6 子通道评估 N{l�j"�C]L <4�ca�G2~q
1Tn0$+�$.4 H*SEzV��b� �8UA�bTqB- %&D,|�Yl�6 子通道评估 N{l�j"�C]L <4�ca�G2~q • VirtualLab Fusion还可以分别评估每个微透镜的结果.
7.-g=R�c�z ��cy�R K&J • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择.
N�S�^(�5�g }8+rrzMU�B 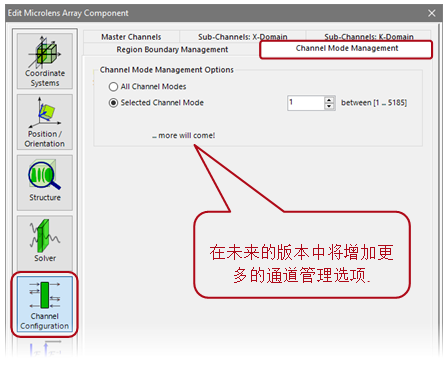 `�vkNp8��|
l�?_h(Cq< 近场评估探测器的定位 J2c.J/�o�� =N����_7DT
`�vkNp8��|
l�?_h(Cq< 近场评估探测器的定位 J2c.J/�o�� =N����_7DT 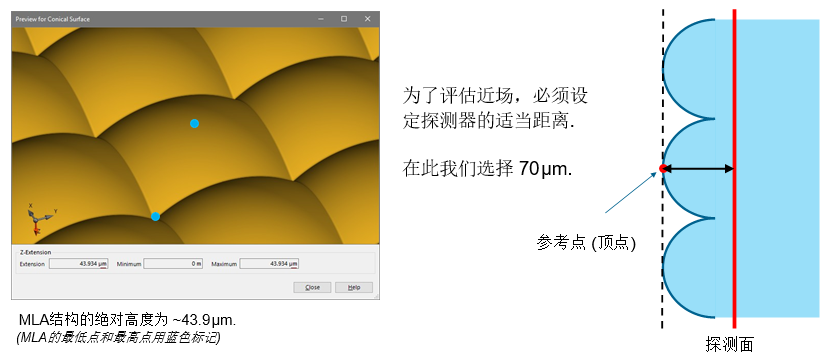 35 Y#eU2] H<^*V8J 'w 区域边界管理 1��pT
�v�6 Cfiz�h@<�
35 Y#eU2] H<^*V8J 'w 区域边界管理 1��pT
�v�6 Cfiz�h@<� 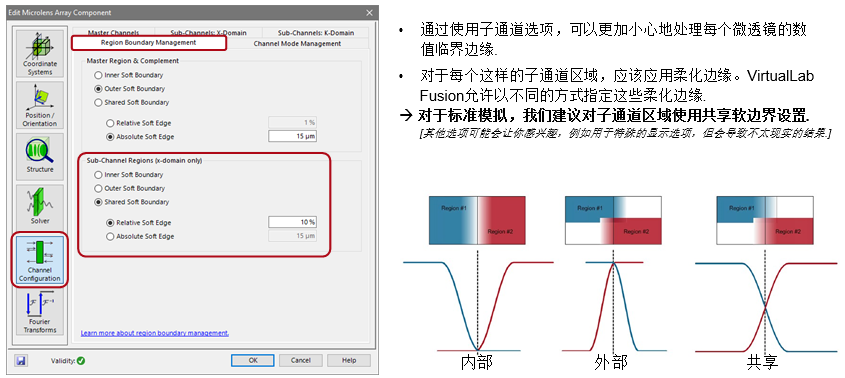 u!&w"t61Nd t��#kPEiD� 场景演示 Q}a, �f7�5 !�OM
P�]�� 演示示例的配置 cBg��dBPDa Hw��E�1cOT
u!&w"t61Nd t��#kPEiD� 场景演示 Q}a, �f7�5 !�OM
P�]�� 演示示例的配置 cBg��dBPDa Hw��E�1cOT 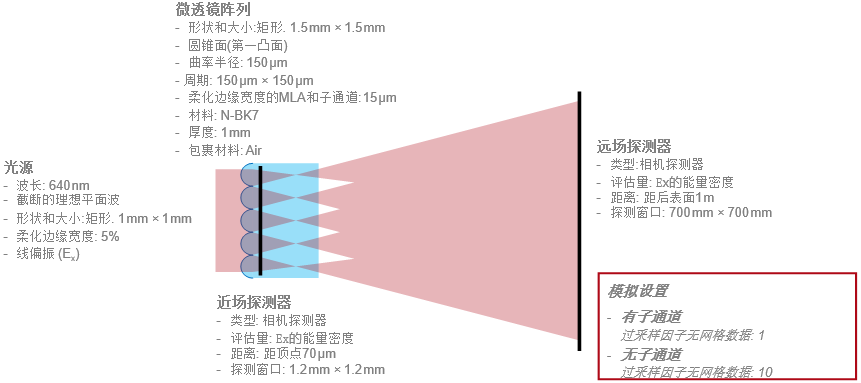 �buI���y�+ E�R �z@o�_ 光线追迹结果: 综述 ��q\�P�H�A U#��o5(�mK
�buI���y�+ E�R �z@o�_ 光线追迹结果: 综述 ��q\�P�H�A U#��o5(�mK 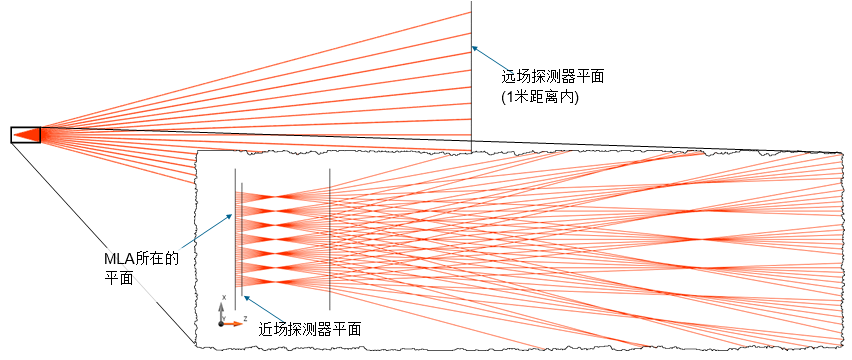 *b{�C`[
=V 5<%]6c��x} 光线追迹结果: 远场 i�Sm5k�:�7 ) ��h*)�_7
*b{�C`[
=V 5<%]6c��x} 光线追迹结果: 远场 i�Sm5k�:�7 ) ��h*)�_7 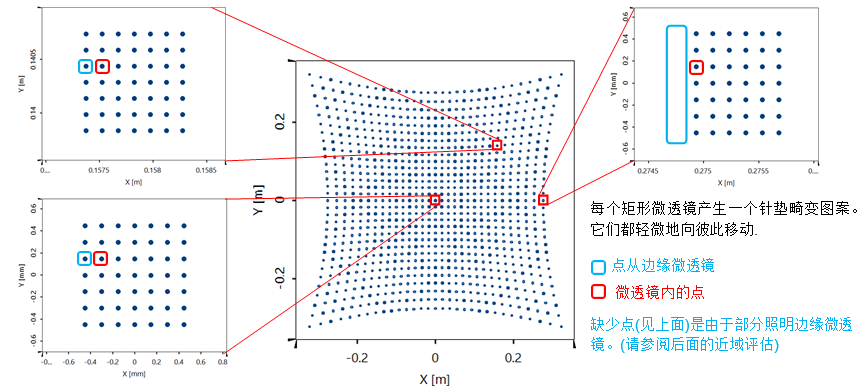 �.zm'�E<�� qDOJ�;>��I 场追迹结果: 近场的能量密度 aJ�nZco�6� q&eU��w<(F
�.zm'�E<�� qDOJ�;>��I 场追迹结果: 近场的能量密度 aJ�nZco�6� q&eU��w<(F 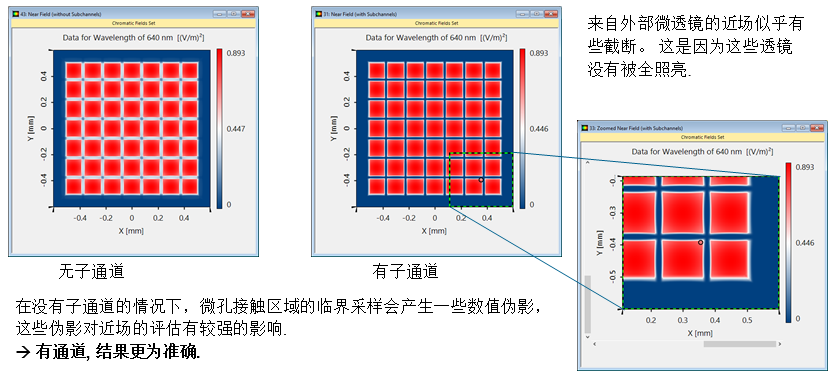 .EOH�khn�� �=Mg/m'QI� 场追迹结果: 远场的能量密度 &4aY5y`8+f oD5����VE
.EOH�khn�� �=Mg/m'QI� 场追迹结果: 远场的能量密度 &4aY5y`8+f oD5����VE
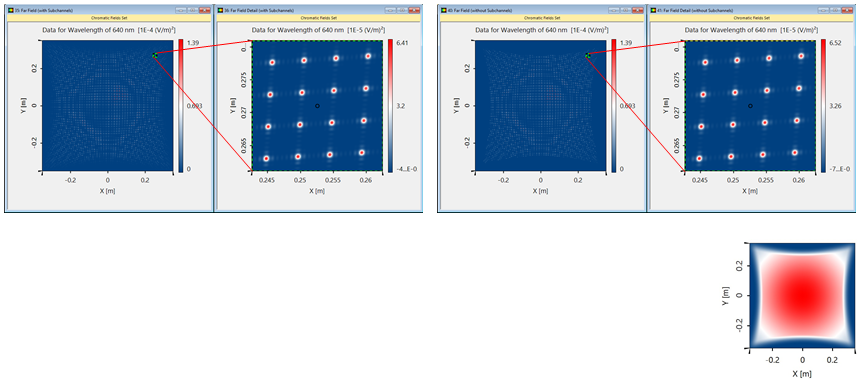 s_(�%��1/{ /+FZDRf!�r
s_(�%��1/{ /+FZDRf!�r 在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的:
^bVY&iXNu d+9T}? T:* 带有子通道的
仿真时间: ~70 s
<P�g]V:=g' 无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10)



