-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-08-05
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 *ZGQ`#1.X6
~s��AINV>A
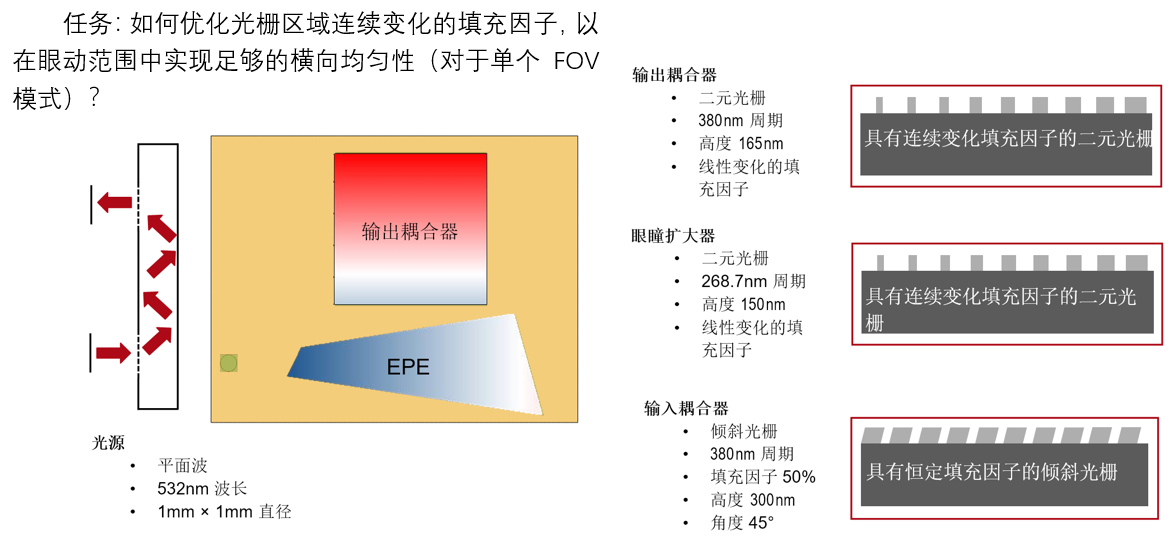
在增强现实和混合现实应用领域的光波导光学器件设计过程中,横向均匀性(每个视场模式)和整体效率是两个最重要的评价函数。 为了在光波导系统中获得适当的均匀性和效率值,有必要允许光栅参数的变化,特别是在扩展器和/或输出耦合区域中。 为此,VirtualLab Fusion 能够在光栅区域中引入平滑变化的光栅参数,并提供必要的工具来根据定义的评价函数运行优化。 此用例展示了如何使用连续变化的填充因子值优化光波导,以获得足够的均匀性。 ")HTUlcAe}
��2Z,;#�t
 AY0o0\6c�w \�XM�l8G� 任务描述 �YFLWkdqAY AY0o0\6c�w \�XM�l8G� 任务描述 �YFLWkdqAY
U��%_a@&<�
 �+F� 6KGK[ e\.|d�<�N? 光波导组件 kOR%�<�#:J �+F� 6KGK[ e\.|d�<�N? 光波导组件 kOR%�<�#:J
3D�u�&KZ�
 ���nI.�#A� r7*[k�[^[^ 使用光波导组件,可以轻松定义具有复杂形状区域的光波导系统。 此外,这些区域可以配备理想化或真实的光栅结构,以充当输入耦合器、输出耦合器或出瞳扩展器。 更多信息请见: y~1U�U�3k5 ���nI.�#A� r7*[k�[^[^ 使用光波导组件,可以轻松定义具有复杂形状区域的光波导系统。 此外,这些区域可以配备理想化或真实的光栅结构,以充当输入耦合器、输出耦合器或出瞳扩展器。 更多信息请见: y~1U�U�3k5
N�EZF� �q?
 \{G�6!dV|S \{G�6!dV|S
���<g�,k�[
光波导的构造 ��Qkqn~>�
�f���]5bAs 光栅区域 Q�sDa�b�4�
V85a{OBm,8
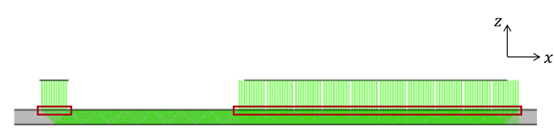 3Luv$���6 Um�15@p�;� 对于输入耦合器、输出耦合器和眼瞳扩展器 ,使用了真实光栅。 他们的瑞利矩阵和相应的效率是用 严格计算的。 您可以在以下位置找到有关如何设置的更多信息: ,X\�z�#��B 3Luv$���6 Um�15@p�;� 对于输入耦合器、输出耦合器和眼瞳扩展器 ,使用了真实光栅。 他们的瑞利矩阵和相应的效率是用 严格计算的。 您可以在以下位置找到有关如何设置的更多信息: ,X\�z�#��B
�4_�t
aCK
 EE&~D~yHUL EE&~D~yHUL
�6Om��-[�^
如何使用真实光栅结构设置一个光波导 ?�b�8NEVjw
X^9�_'�T�9 总结-组件 .1|'9@]lj4
$j{y�n�h)^
 [rPW@|�^�5 [rPW@|�^�5  o,H�a�-z]f EN���J�]�� 带有附加指南的一般工作流程 ���}��tv�- �x�6,S#��p 1. 基本光学光波导设置的配置(不属于此用例的一部分) PU?k�QZU~) �MQ\:/]�a� 2. 足迹和光栅分析工具的应用,包括生成满足参数调制所有要求的光学设置 w��=#&(xm0 �sd8�o&6�� 3. 光栅参数所需调制的定义 A7�|"�0*62 ,Z�>Rv��Ll 4. 选择变量并定义评价函数以优化调制光栅参数。 Uk;S��Y[mU � T
X�6Ydd [m�Wo&Ph[- o,H�a�-z]f EN���J�]�� 带有附加指南的一般工作流程 ���}��tv�- �x�6,S#��p 1. 基本光学光波导设置的配置(不属于此用例的一部分) PU?k�QZU~) �MQ\:/]�a� 2. 足迹和光栅分析工具的应用,包括生成满足参数调制所有要求的光学设置 w��=#&(xm0 �sd8�o&6�� 3. 光栅参数所需调制的定义 A7�|"�0*62 ,Z�>Rv��Ll 4. 选择变量并定义评价函数以优化调制光栅参数。 Uk;S��Y[mU � T
X�6Ydd [m�Wo&Ph[-
Ju+��@�ROZ �<hy�>NM@$ ��~�01�r�c
w�M�!QU{Lz 4f"�����be ItO�Vx!"@9
Vaq��=�f/ 注意: SC|cCK hqi 光栅调制是针对各个光栅区域定义的。 �"_#%W
�oo Q��r0JJoHT 足迹和光栅分析 t��'9E~_!C
<o?qpW$,>�
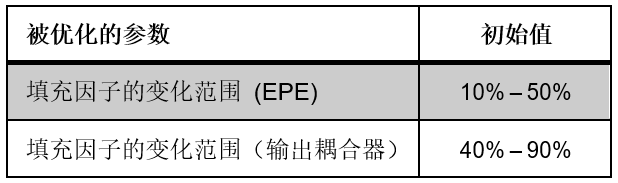
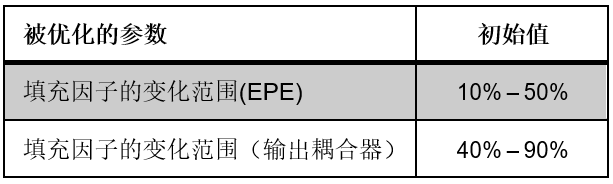
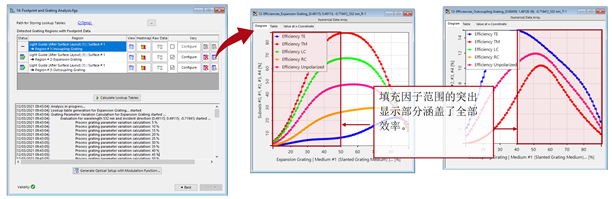 �3\D� jV2t �wau�81rSd 在足迹和光栅分析工具的帮助下,光栅特性(复值)被预先计算并存储在查找表中,用于选定参数的指定范围(例如填充因子)。 根据可用的效率调制范围选择填充因子的初始范围。 更多信息可参见: ��9=<
Z��> 1��Kc*�MS� �3\D� jV2t �wau�81rSd 在足迹和光栅分析工具的帮助下,光栅特性(复值)被预先计算并存储在查找表中,用于选定参数的指定范围(例如填充因子)。 根据可用的效率调制范围选择填充因子的初始范围。 更多信息可参见: ��9=<
Z��> 1��Kc*�MS�
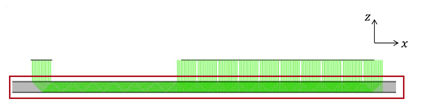
 m��H8�s'F %&gx�@� \v 光栅分析和在光波导上的平滑调制光栅参数 �kN]#;R�6 ^x/0*t5};z 初始系统的生成 e2B~j3-�?z
m��H8�s'F %&gx�@� \v 光栅分析和在光波导上的平滑调制光栅参数 �kN]#;R�6 ^x/0*t5};z 初始系统的生成 e2B~j3-�?z
�o@pM??&x�
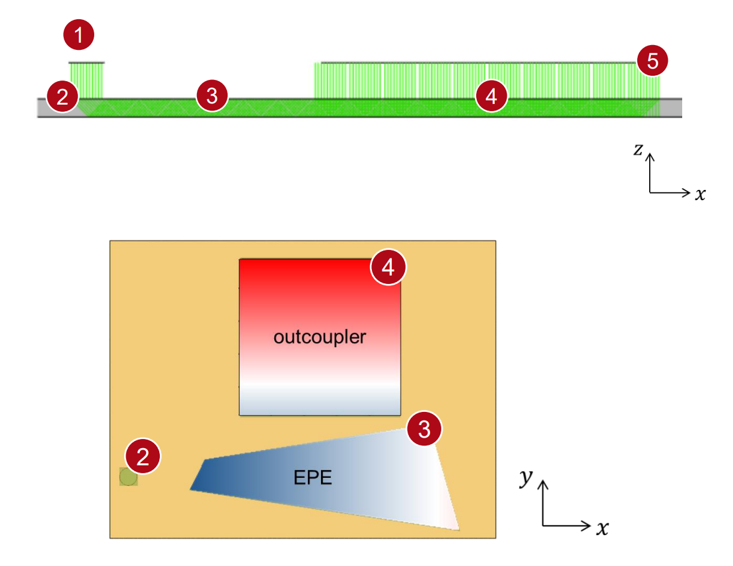
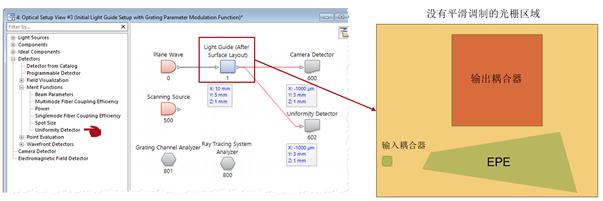 4-3�B��"�� (V=lK6�WQm • 具有所谓光栅参数调制功能的光波导设置由足迹和光栅分析工具生成(包括光栅特性)。 SxH�}/�I|W X^x�u$d6 � �OH)SdSBz� 4-3�B��"�� (V=lK6�WQm • 具有所谓光栅参数调制功能的光波导设置由足迹和光栅分析工具生成(包括光栅特性)。 SxH�}/�I|W X^x�u$d6 � �OH)SdSBz�
�b��JBx�~� qHHWe<�}OT 定义光栅区域的调制函数 (1j�k�Z�^7
�YKM(qh��2
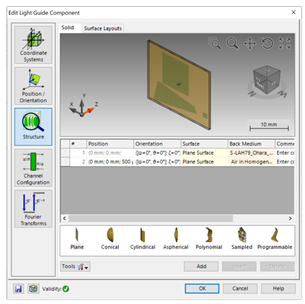
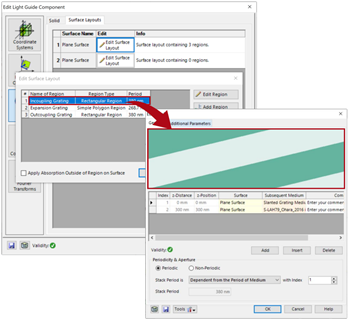
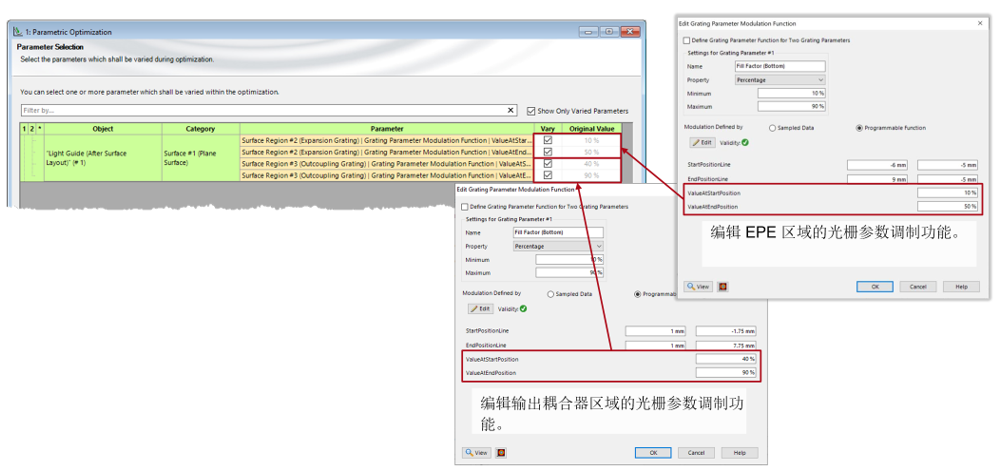
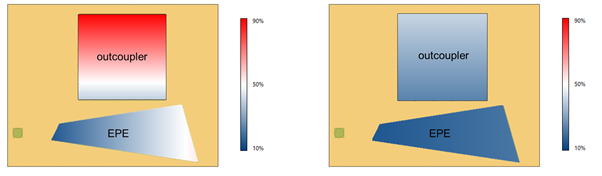
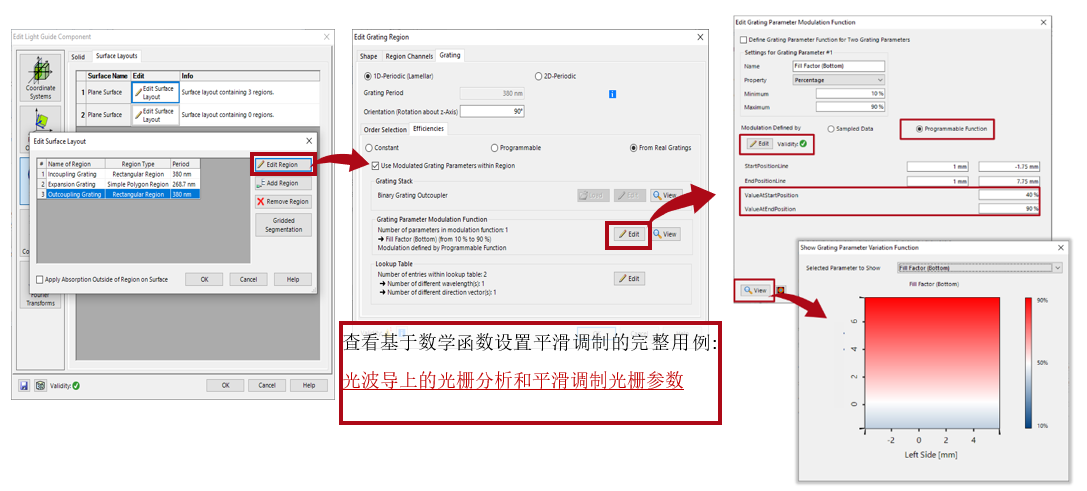 �1��^Caz-� P_���ZguNH • 打开光波导组件中区域的编辑对话框; 光栅特性 :'!?�dszS� 并且查找表存储在光栅区域中。 KqtI^�q�C8 • 编辑光栅参数调制功能,使其定义为可编程功能,光栅参数的预期线性调制由开始和结束位置的值定义(EPE 从左到右边界,耦出合从上到下)。 9L�&AbmI�r �1��^Caz-� P_���ZguNH • 打开光波导组件中区域的编辑对话框; 光栅特性 :'!?�dszS� 并且查找表存储在光栅区域中。 KqtI^�q�C8 • 编辑光栅参数调制功能,使其定义为可编程功能,光栅参数的预期线性调制由开始和结束位置的值定义(EPE 从左到右边界,耦出合从上到下)。 9L�&AbmI�r
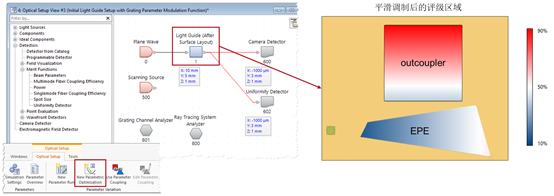
t}oxHEa V� 初始系统的生成 `>#X�,Lw$g
Nx�t/R%�(�
 R
�jAeN#,?
{'�r�*Jb0 R
�jAeN#,?
{'�r�*Jb0
^Nn�Z�Y�r.
9f"6�Jw@F� ?tSY=DK\�n
 �Y":hb;��& Z��jI^0D8� 优化设置-选择参数 ]}�5j�X�^j �Y":hb;��& Z��jI^0D8� 优化设置-选择参数 ]}�5j�X�^j
!8A5Y[(XD
 _�`�D_0v(X _�`�D_0v(X
�:�YV!;dKJ • 分别为EPE 和输出耦合器光栅选择调制开始和结束位置的填充因子值。 m=}kGzI�Y4 d+^4�;Hv�4 • 根据调制功能编辑器中的设置自动填充原始值。 i&bttSR�NV z+\>e~U6J} 优化设置 - 指定约束 �49kY]z|"w hnY^Z��_v! 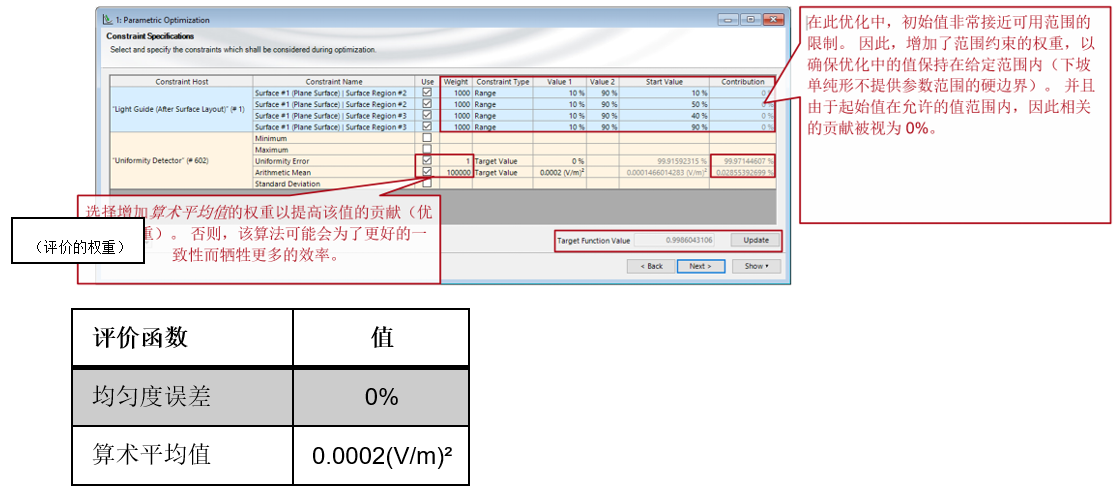 Y�*AHwc<w` Y�*AHwc<w`
6"=�e��+V@ • 定义变量的可用范围 T[�;{AXLeI }h]:�I'R!� • 为了实现低均匀性误差和可接受的强度分布,将均匀性误差的目标值设置为 0%,并指定算术平均值的目标值。 bC@�b9o�pD Fvv�6<�E�� • 通过定义评价函数的权重值,可以调整优化的贡献(相关性或优先级)。 5VP�uH��Y2
���ipyO�&v 优化结果 )O+9�v�}�2 \�NS�wo�P�
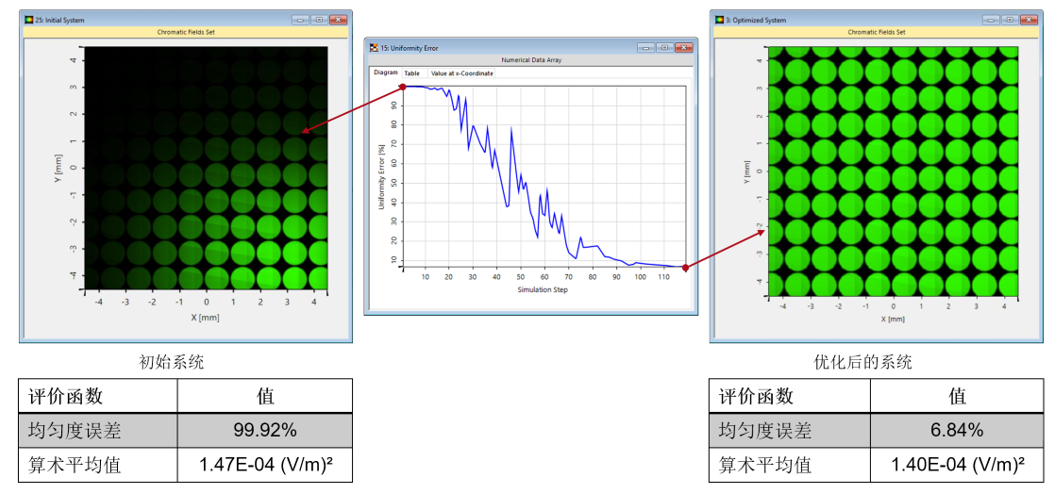 ,Y5�+UzE@ -51L!x}1�c 优化结果 �C�<��7�J5 HL!-4kN
<$ ,Y5�+UzE@ -51L!x}1�c 优化结果 �C�<��7�J5 HL!-4kN
<$
 X F40�;urm X F40�;urm
nrxN_0 R�%
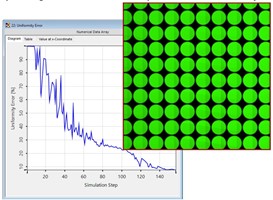
 ^�1nf|Xj�[ y�T,�UM�^' 优化均匀性与能量密度 �d6n6�=
[* P$oa6`%l� ^�1nf|Xj�[ y�T,�UM�^' 优化均匀性与能量密度 �d6n6�=
[* P$oa6`%l�
通过眼动范围对初始和优化系统进行的线扫描揭示了均匀性和局部能量密度的差异。 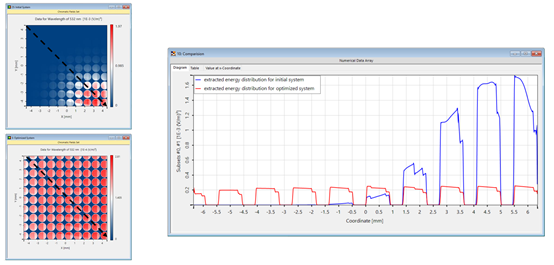 ��:���@3d� Z?@�07Y[|K VirtualLab Fusion技术 �VEpQT
Qp ��:���@3d� Z?@�07Y[|K VirtualLab Fusion技术 �VEpQT
Qp
EgO4:��8$h
 �<
x�V!vN �<
x�V!vN  cN :�;��ir cN :�;��ir
|



