-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-15
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 ru�9@|FgAE
(7b9irL&cn 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 F:P2:s<d�- :������7"Q  ��tN\I�2wm KN657 �|f� 微透镜阵列的结构配置 �*P7/ry^<F F@q9U�lfB- ��tN\I�2wm KN657 �|f� 微透镜阵列的结构配置 �*P7/ry^<F F@q9U�lfB- 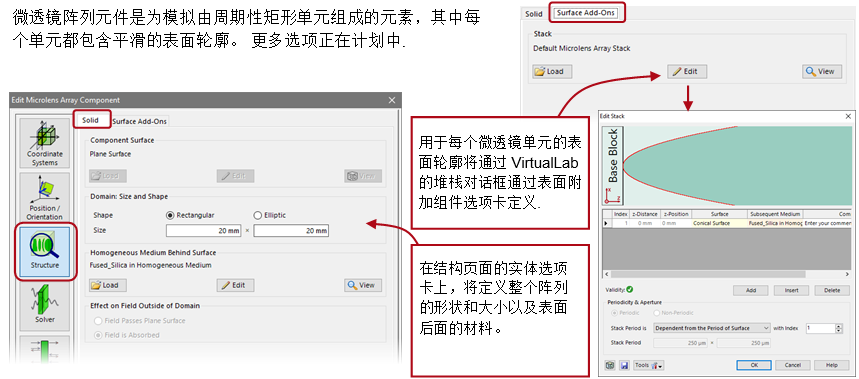 :�� -#���w ,�<#Rk�'y$ :�� -#���w ,�<#Rk�'y$
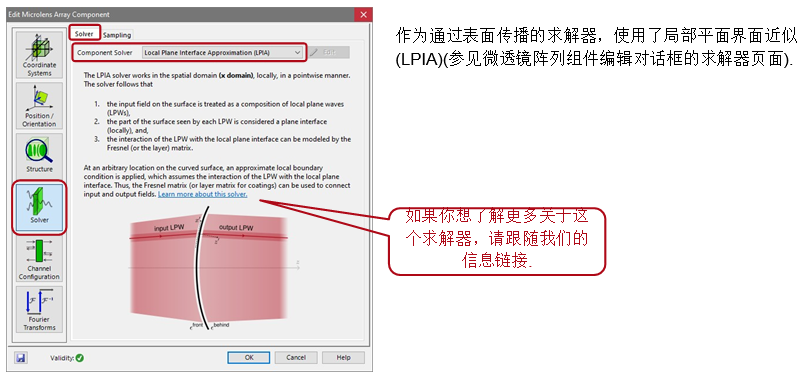
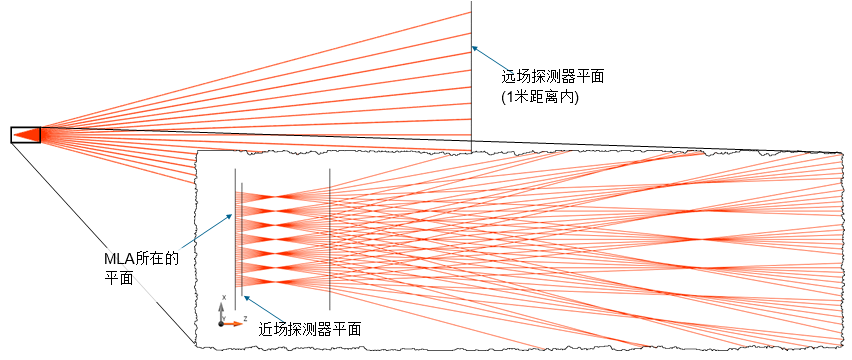
场通过哪一种方法通过MLA传播? i�.�Y2]1�� �uo��2��k�
 %CvVu�)�tc /�J_�],KdU 子通道分解 n~\; ���+U C"�**>OGe� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . R_+:n�CB@, • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 >��K,QP<�B 例如 微透镜的数量,表面变化的强度, �*'A*!=�5( • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。
%!��nN�<% • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. e/:?�����9 %CvVu�)�tc /�J_�],KdU 子通道分解 n~\; ���+U C"�**>OGe� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . R_+:n�CB@, • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 >��K,QP<�B 例如 微透镜的数量,表面变化的强度, �*'A*!=�5( • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。
%!��nN�<% • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. e/:?�����9 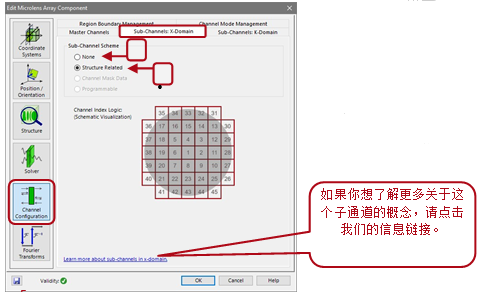 NNq�vj�M-� NNq�vj�M-�
ak|
Vn�Na] R?:�Q=7�K�
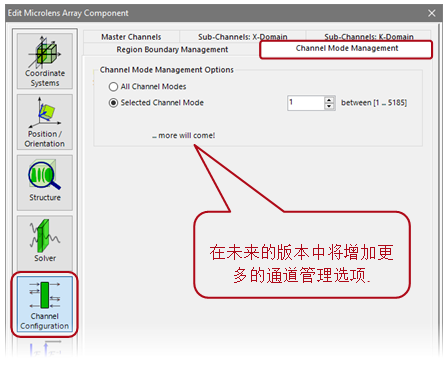
yn]S��c<uK &���@�CUxK 子通道评估 �~�!PWJ~�U 1?|"33\03R • VirtualLab Fusion还可以分别评估每个微透镜的结果. >F�OC�dlJ# 1~~�GF�_l? • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. k�]r4b`x`� y�c3/5�]E&
 yUo8-O�aL7 yUo8-O�aL7
YU[#4�f��~ 近场评估探测器的定位 JZxA:�dg
l ?u�L-q�sU� 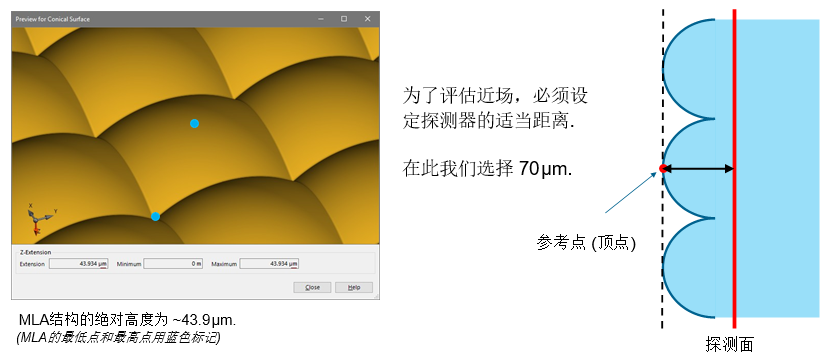 �+3�-5\t`� H9ES|ZJ��s 区域边界管理 =�0�EK�rG� 9^�n0<(99b �+3�-5\t`� H9ES|ZJ��s 区域边界管理 =�0�EK�rG� 9^�n0<(99b 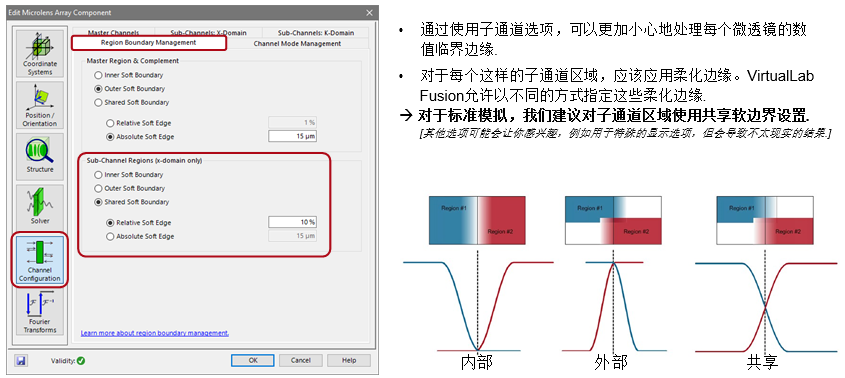 e_|<tYx�>< w8Z#]k�Rv� 场景演示 o �jxK8_kl e_|<tYx�>< w8Z#]k�Rv� 场景演示 o �jxK8_kl
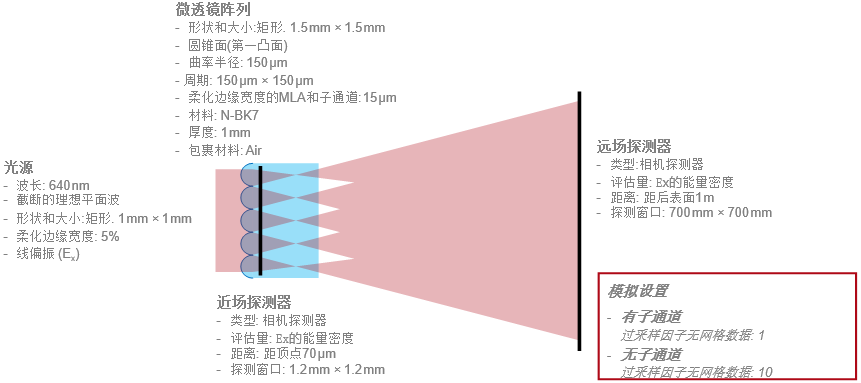
Hq��s-q4G$ 演示示例的配置 �57;0,k5Gy SS�`\_@ci�
 _�wb]tE ~g _�wb]tE ~g
XtZd%
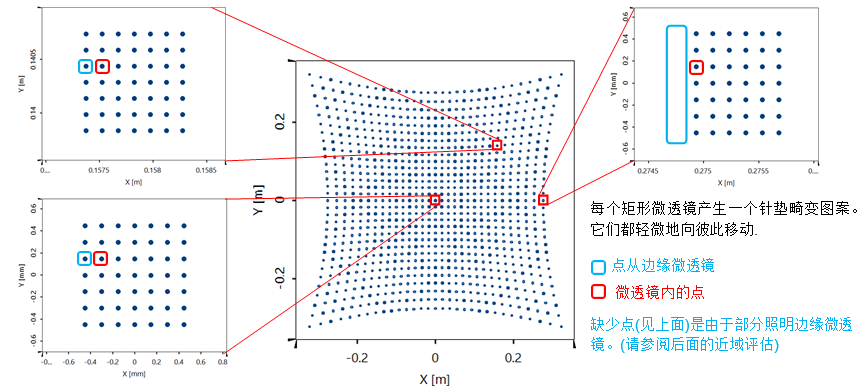
#2}, 光线追迹结果: 综述 ,qp8Rg|3j ��w{[���^�
 r�L"]m�_FK �^��� /G ; 光线追迹结果: 远场 ^8�,prxaok D�DGD�j)=` r�L"]m�_FK �^��� /G ; 光线追迹结果: 远场 ^8�,prxaok D�DGD�j)=`
 �08�^f|�K� vI(LIfe��; 场追迹结果: 近场的能量密度 *@#G�c%mGu �~%h�
)G#N �08�^f|�K� vI(LIfe��; 场追迹结果: 近场的能量密度 *@#G�c%mGu �~%h�
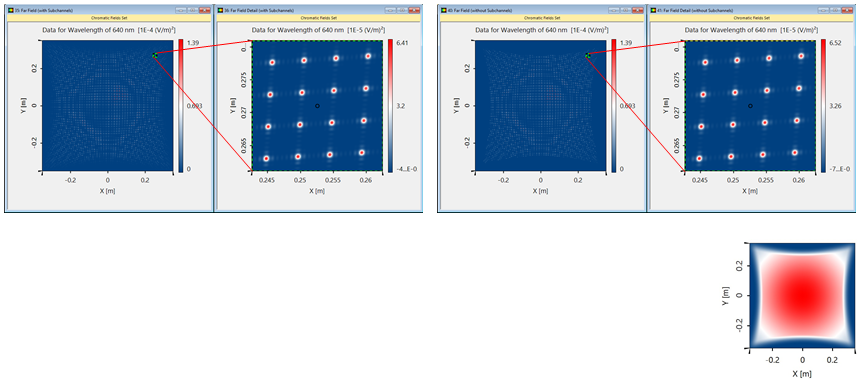
)G#N 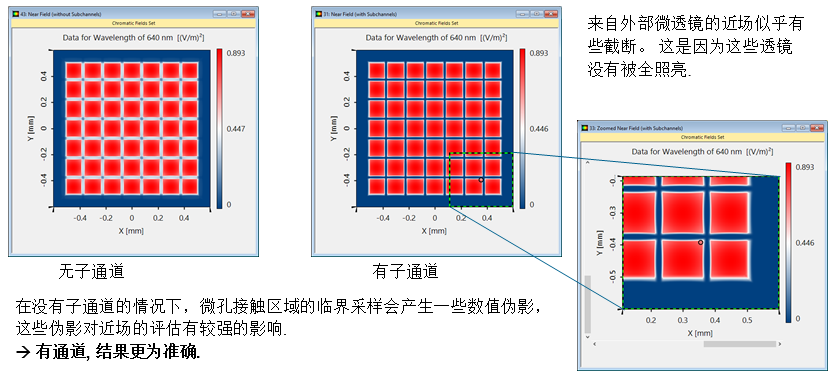 m�`8�{arz2 �EU:�N�9oT 场追迹结果: 远场的能量密度 ��'�b�M=�� e�4I�bj�/� m�`8�{arz2 �EU:�N�9oT 场追迹结果: 远场的能量密度 ��'�b�M=�� e�4I�bj�/�
 /"A=����Yf Y(1?uVYW\d /"A=����Yf Y(1?uVYW\d
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: Tb2#�y�]27
`G:���1��
带有子通道的仿真时间: ~70 s xL.m�<XD�L
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) Jv�3G��\9_
_MIh�eCvV V��1d#�7rP
"wZvr}x�k �J��`[j�ub MmvJ�)|�&t
R�8lja%+0$
|



