-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2025-04-23
- 在线时间1766小时
-
-
访问TA的空间加好友用道具

|
摘要 )I���l)
H
t5:
1' N9P 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 9�u�6GeK~G a"7z�z]XO2  ctI��=�|�K O#� n<`;�W 微透镜阵列的结构配置 jeb�]3i=pw 3@#W�Y�v�D ctI��=�|�K O#� n<`;�W 微透镜阵列的结构配置 jeb�]3i=pw 3@#W�Y�v�D 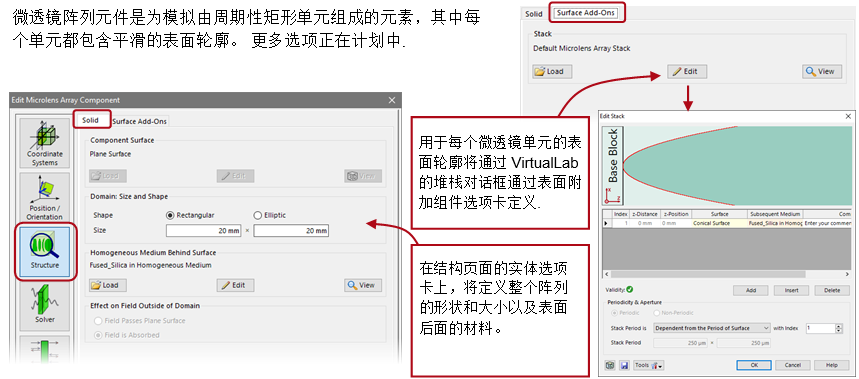 {k
BHZ$/�� D6X0(p��U0 {k
BHZ$/�� D6X0(p��U0
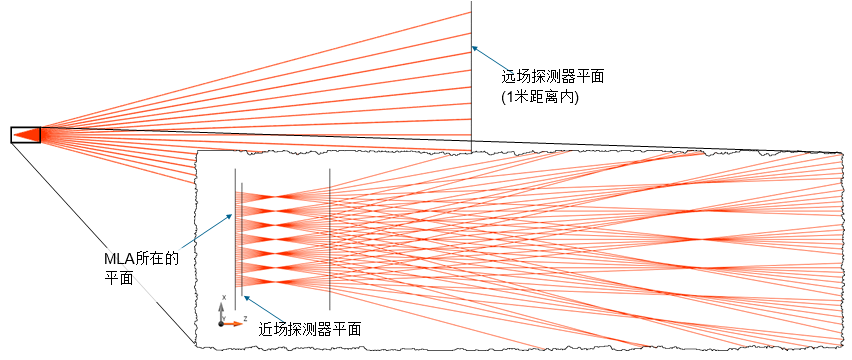
场通过哪一种方法通过MLA传播? je_:h��D�r n~ w.\939@
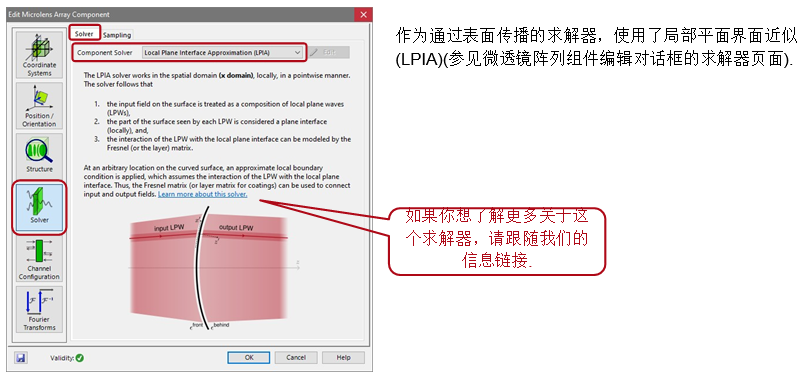 �og0��su� Nf�v.v1Tt+ 子通道分解 F|mppY'<�J /e|vz^#+1, • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . �CK[w0VC�T • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 [�;6,l�I}� 例如 微透镜的数量,表面变化的强度, \!�`k:lusa • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 1�eod;^AP9 • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. *CtWDUxSdW �og0��su� Nf�v.v1Tt+ 子通道分解 F|mppY'<�J /e|vz^#+1, • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . �CK[w0VC�T • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 [�;6,l�I}� 例如 微透镜的数量,表面变化的强度, \!�`k:lusa • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 1�eod;^AP9 • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. *CtWDUxSdW 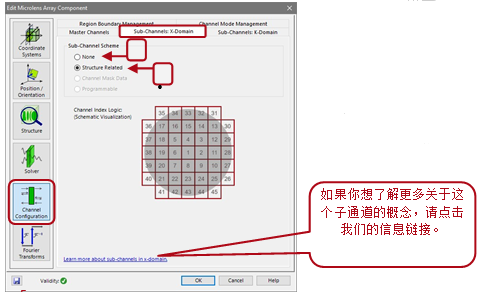 i��'bv�iD� i��'bv�iD�
py�\�KY R �tqo��k�.h
>|j8j�:�S[ �vs�=8x�\W 子通道评估 iO$Z�?Dyg9 �Bs?B\k=�� • VirtualLab Fusion还可以分别评估每个微透镜的结果. 3m;*�gOLk6 3[_zz;Y*d • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. ��Hs�9; &C �|��|�p>O�
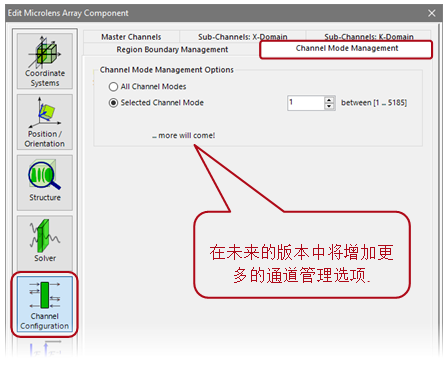 M��S�Qz,nn M��S�Qz,nn
V�
�L�XU�� 近场评估探测器的定位 ���q>X�30g {��$
a
$�m 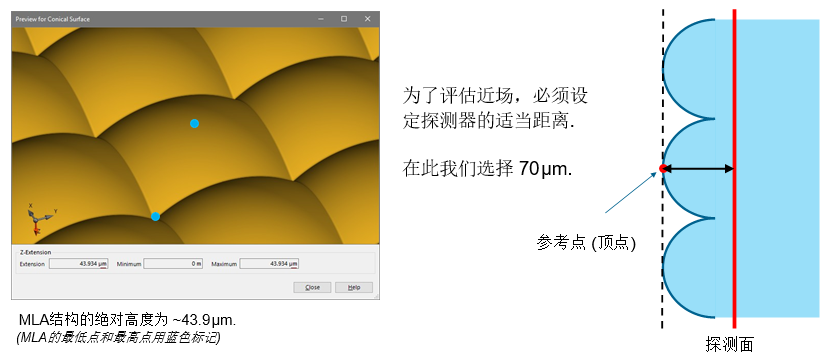 d2\#�Zlu<� ^9�_4#Ep�( 区域边界管理 \US'tF�)/� Z [[AmxE'l d2\#�Zlu<� ^9�_4#Ep�( 区域边界管理 \US'tF�)/� Z [[AmxE'l 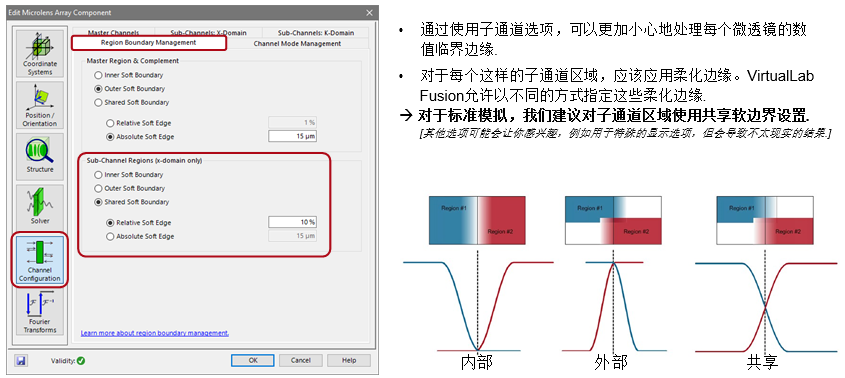 Nw��3K@�Ge �&];:uYmMU 场景演示 @��m`1Vq?O Nw��3K@�Ge �&];:uYmMU 场景演示 @��m`1Vq?O
H�l|�EySno 演示示例的配置 �6gy�;�Xg �x��Z���=6
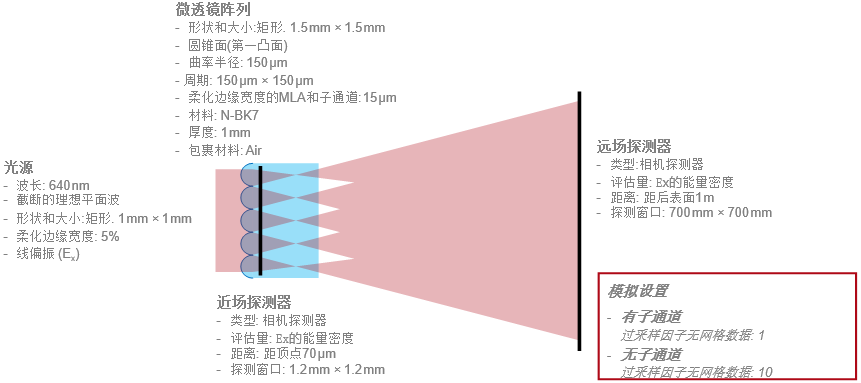 %[l#�S*)~� %[l#�S*)~�
�i�tU
P�%� 光线追迹结果: 综述 Ry�uI2jEy� r
&.�g��OC
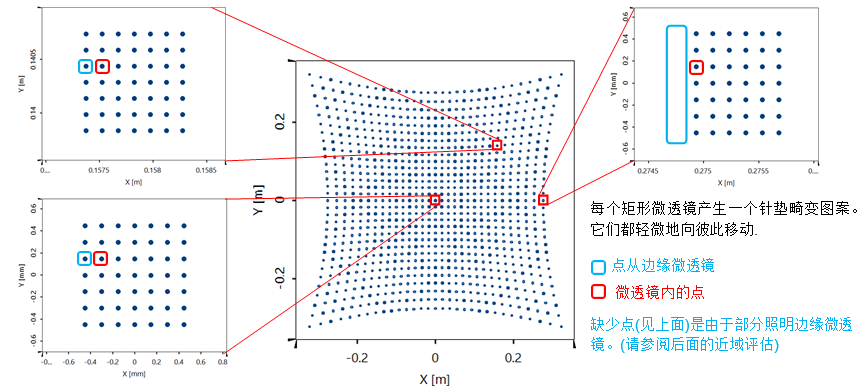
 [�D$%�LR�X w^EUB�RI�- 光线追迹结果: 远场 Jxo#s�V-�
"�|�,;�~k1 [�D$%�LR�X w^EUB�RI�- 光线追迹结果: 远场 Jxo#s�V-�
"�|�,;�~k1
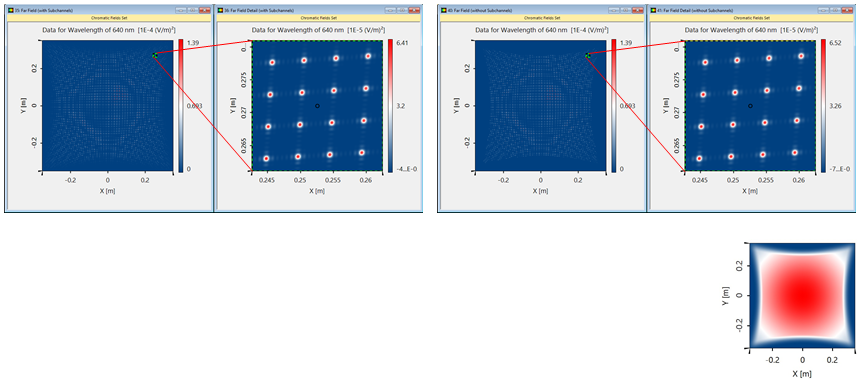
 A_pcv7�=@ cXDG(.!n7B 场追迹结果: 近场的能量密度 )@\Eibt2oH o�v xX.h�O A_pcv7�=@ cXDG(.!n7B 场追迹结果: 近场的能量密度 )@\Eibt2oH o�v xX.h�O 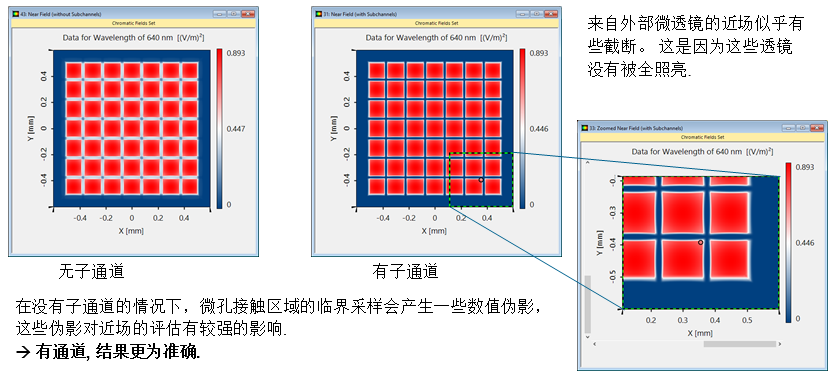 V#Pz���`�D *K#Ci1Q� 场追迹结果: 远场的能量密度 p�aYvYK-K? b<�E0|�VW V#Pz���`�D *K#Ci1Q� 场追迹结果: 远场的能量密度 p�aYvYK-K? b<�E0|�VW
 h\<;�N*Xi� K�k9eJ��\� h\<;�N*Xi� K�k9eJ��\�
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: �e0�e�3�b]
�Z�*Lv!6WS
带有子通道的仿真时间: ~70 s yN/��U�yhq
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) .�ng:��Z7�
]�"X} �FU� nW��"��ml$
BpR#3�CfW� 1)N�~0�)dO *�.P3fVlZ
\���L5h�&�
|



