-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-31
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
激光扫描系统(LSC.0002 v1.0) :*}�Q/�]N� ]bY�|>���q
应用案例概述 OT
0c��5x� ��Zk=,`sBC 系统细节 4�aS}b3=�n "�U�}kp#) 光源 9r?�Z'~,Za – 绿光二极管 |�(.\J`_e� 元件 /}m�)FaAi� – 双轴振镜扫描仪 CeYhn\m5K0 – F-Theta物镜 |UB$^)T�wb 探测器 �.��$&^y�p – 场曲和畸变探测器 ���:0r�,.) – 光束强度剖面探测器 ,.<mj �!YE – 焦点区域探测器 �sUG!dwqqd – 光束参数探测器 �g�$K\�rA� 模拟/设计 aJ�+V�]WmA – 光线追迹:分析扫描场尺寸,场曲以及畸变 J~2SGXH)^? – 场追迹:考虑衍射效应,进行更精确的光束尺寸和剖面的研究 5%I3e�L�%s N{v)�pu�.� 系统说明 B]�X8Kz�Lu NI��s�7�v� i�JzB�d�7� 激光扫描系统的性能评估 O�S z7�1;j }� �k2��Q� 一个激光扫描系统的扫描光学部分包含了一个扫描仪单元和一个F-Theta物镜,在一维扫描过程中(沿入射角Theta),通过分析光束的场曲和畸变来评估其性能。 4C�M'I~��� 此外,计算了不同扫描位置处的光束尺寸和轮廓。 QF>T)1&J[7 ��x"b'�Pmw 模拟和设计结果 0fOhCxtL�@ l��!tR�<$| 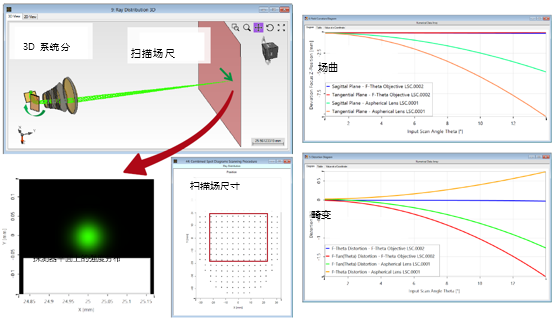 d��VbF�MQ& d��VbF�MQ&
�+u$l]~St\ 在此案例中,你将从以下选择的特征中获益: I){4M�oH. 各种探测器 D>7a0p784 - 测量与反射镜扫描角度相关的焦点位置 8&�2�+=<Q~ - 测量探测器平面上的光束位置 �pkn^K+<n, - 使用焦点区域探测器计算焦点区域中的场 C��y��;UyZ 参数耦合 �`����g��] - 针对扫描光学部分的期望输入扫描角度Theta来调整反射镜方位 �tA��v3��+ 参数运行 �� ��QHNyH - 估计扫描场尺寸 1&�dt�q,|N - 生成场曲和畸变图 5NhFj�PETr /s�4~Ij`be 总结 RD��dnO�zx
�G�L
n� M1 VirtualLab可以 X���FS�~� 模拟一个由双轴扫描反射镜和一个F-Theta物镜构成的激光扫描系统 �U,�#~��9� 分析目标平面上的光束偏转 ;5tOQ&p%v� - 通过光线追迹来计算扫描场尺寸,场曲和畸变 `�\UY5�n72 - 通过几何场追迹来计算光束剖面 11��oNlgY& - 场追迹可以更准确地分析光束位置和焦点 m]n2w�mE3n 应用案例详述 x%EG�xs;>^ \FsA-W\X�� 系统参数 �N68mvB�e� KsKE#])&�l 应用案例内容 $*�0-+���h LSC.0001和LSC.0002为激光扫描系统。 .�iy4
(�P4 在这个案例中,通过模拟扫描过程来分析F-Theta物镜的场区和畸变。 �
V9)�� /� 相对于LSC.0001,显示了性能提高。 P(�shbi�@� 强烈建议首先阅读LSC.0001。 uP�fz'�|, 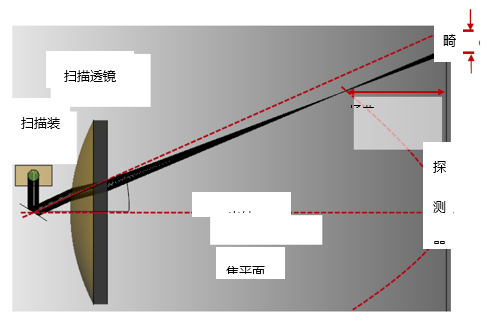 vG�_�R( ]d vG�_�R( ]d
��7"�(Zpu�
连续激光模 �cfIC(��d IhNX~Jg'^ 规格:输入激光光束 p~��w�] ~\ 'gf[Wjb,%� 激光组件中的单模二极管激光器 '�ZF6�Z�9� a`�'��>VCg 规格:电流反射镜定位系统 t.(����
`$
Rt#QW*h\|i
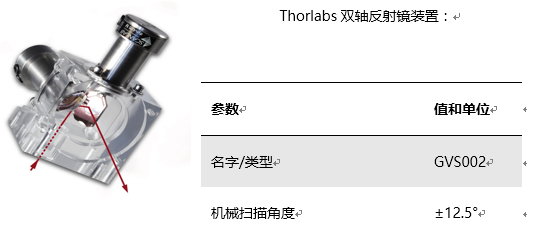 M/�W"M9�u 典型双轴振镜扫描仪 �z x-[��@G M/�W"M9�u 典型双轴振镜扫描仪 �z x-[��@G
<��U3X�4)r
Ih.�+-��!w 规格:F-Theta物镜概述 0"R>:�f}��
��5&��n:i, n[j�XqFm!` 规格:F-Theta对象透镜参数 �H�^-Y]{7 �kPX�+n+�$ 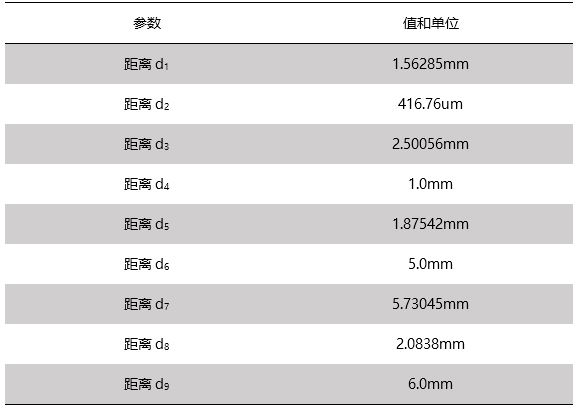 &Sd5]�r@+� &Sd5]�r@+� 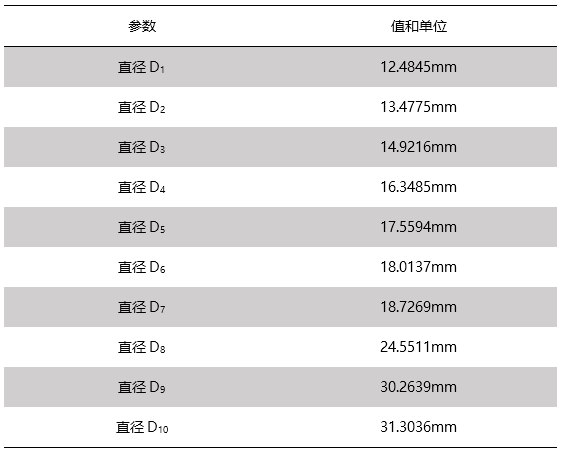 Rhow�hQ)�G Rhow�hQ)�G
来自目录Schott_2014 rCw�4a�?YS a/�V,iCiH� 详述应用案例 Xe_ �<�]|�
�Lp&n�O�� 光线追迹模拟和结果 $4{sP�Hi)I }+�!"m�Jx@ 定位双轴振镜扫描仪 %tVU ��R�j
+
+�L7*1�t
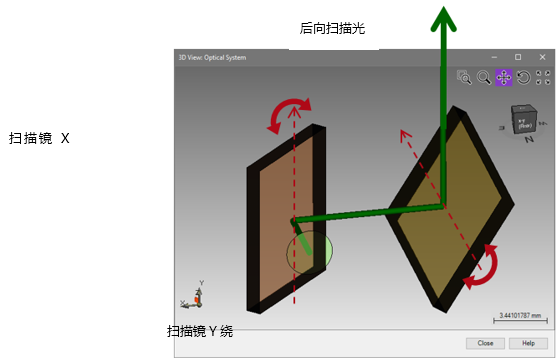 |?88EG@0�5 �76�w[X=Fv 双轴反射镜由两个分离的镜子组成。 Tksv7*5$� 第一镜将目标光束偏转到x方向,而光束沿第二个镜子的旋转轴偏转。 _x.�2&S�89 第二反射镜将目标光束偏转到y方向。 ��J��@-'IJ 在VirtualLab中关于反射镜的设置可以在LSC.0001中找到。 {b�X��N[=j file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd l!,�t�ssQ ��6:2*��<� 评价扫描场尺寸 <SNr\/aCRi 1J�!v;Y�\\ 为了在探测器平面(视野场)评价扫描场的大小,可以执行一个扫描过程。 �Tr?p/9.m
使用参数运行的扫描模式,通过逐步的改变反射镜X和反射镜Y倾斜角度直至最大机械角度±12.5°,以模拟扫描过程。。 S>�dHBR#AD �8a�e�`V!5 |?88EG@0�5 �76�w[X=Fv 双轴反射镜由两个分离的镜子组成。 Tksv7*5$� 第一镜将目标光束偏转到x方向,而光束沿第二个镜子的旋转轴偏转。 _x.�2&S�89 第二反射镜将目标光束偏转到y方向。 ��J��@-'IJ 在VirtualLab中关于反射镜的设置可以在LSC.0001中找到。 {b�X��N[=j file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd l!,�t�ssQ ��6:2*��<� 评价扫描场尺寸 <SNr\/aCRi 1J�!v;Y�\\ 为了在探测器平面(视野场)评价扫描场的大小,可以执行一个扫描过程。 �Tr?p/9.m
使用参数运行的扫描模式,通过逐步的改变反射镜X和反射镜Y倾斜角度直至最大机械角度±12.5°,以模拟扫描过程。。 S>�dHBR#AD �8a�e�`V!5 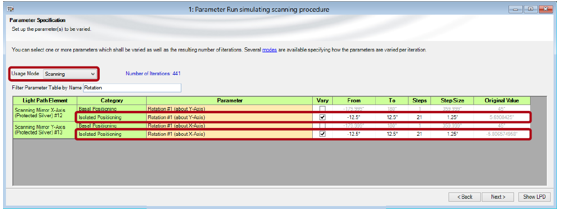 Pl�B3"{}0Q Pl�B3"{}0Q
�
L�gF�?1?
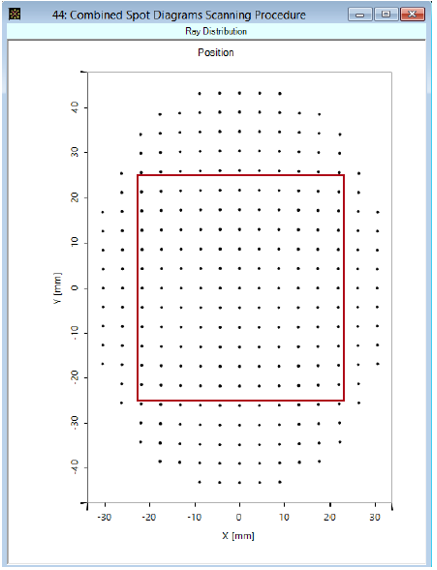 D|5m�NX�%e #m�U\��8M, 上图显示了偏转光束中主光线的位置,光束由于不同位置的反射镜而发生了偏转。由参数运行(Parameter Run)的联合输出特性(Combined Output Feature)生成。 i431�mpMa 参数运行的组合光斑图可以在探测器平面上评估扫描场尺寸(例如50mm x50mm)。 *P'���X[z 此外,扫描位置位于非等距网格,由镜子倾斜和实际入射扫描角Theta之间的非线性关系生成(想要更多细节,参见下一张幻灯片)。 8��]#�FvgX file: LSC.0002_LaserScanning_F-ThetaObjective_02_ScanningProcedureAngles.run X`g��<"Ka �EGD{��n�E 反射镜倾斜和入射扫描角Theta之间的非线性关系 u{4P�)DIQ D|5m�NX�%e #m�U\��8M, 上图显示了偏转光束中主光线的位置,光束由于不同位置的反射镜而发生了偏转。由参数运行(Parameter Run)的联合输出特性(Combined Output Feature)生成。 i431�mpMa 参数运行的组合光斑图可以在探测器平面上评估扫描场尺寸(例如50mm x50mm)。 *P'���X[z 此外,扫描位置位于非等距网格,由镜子倾斜和实际入射扫描角Theta之间的非线性关系生成(想要更多细节,参见下一张幻灯片)。 8��]#�FvgX file: LSC.0002_LaserScanning_F-ThetaObjective_02_ScanningProcedureAngles.run X`g��<"Ka �EGD{��n�E 反射镜倾斜和入射扫描角Theta之间的非线性关系 u{4P�)DIQ
c^w^�'��< 为了更好地说明反射镜X和Y倾斜角和入射扫描角Theta之间的非线性关系,执行相似的参数运行(此过程中没有使用扫描光学原价n)(参见下图)。 XNa{�_3v� 这种非线性特性是由三维反射定律和两个扫描维度分离的反射镜引起的。 Cj>HM��B} 因此,探测器的位置位于一个非等距网格上。 b]u=I���za 为了生成一个等距网格,必须使用3D反射定律来解析地补偿非线性。 �NV�./p�`k q_[y|ETJ]� file used: LSC.0002_LaserScanning_F-ThetaObjective_03_NonLinearBehavior.run �9Z�-2�MF
�"[
S�[vkI 补偿反射镜倾斜和目标平面上光斑位置之间的非线性关系 m�PA)G��,^
�Q�b^{��`� 上一个幻灯片,我们已经看到了反射镜倾斜和目标平面上光斑位置之间的一个非线性关系。在下面我们将使用VirtualLab的参数耦合(Parameter Coupling)工具来补偿非线性关系。 ?eTZ>o.p�/ ?eTZ>o.p�/
|



