-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-17
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
案例:数据阵列输入向导介绍 ��ax�}Xsk_ 这个教程介绍了数据阵列的输入方法。 �<Z_`^~!� 关键词:输入,数据阵列,文本文件,CSV,bitmap KO7c�Z��ME 所需工具箱:基本工具箱 )`�0��� j\ 开始数据阵列输入 �w� Nn�b@�
}R(�_^�@�] 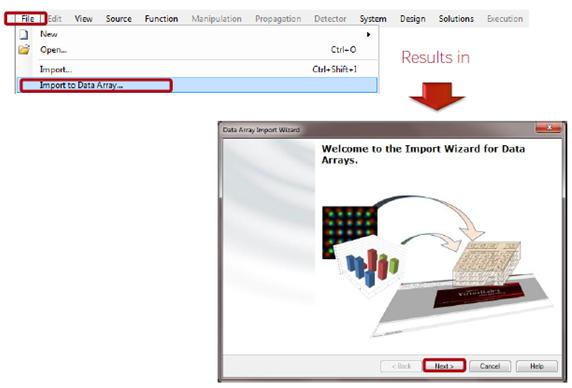 �)H�cC��\[ �)H�cC��\[
�OW^7aw(N6 .$;GVJ-:�5 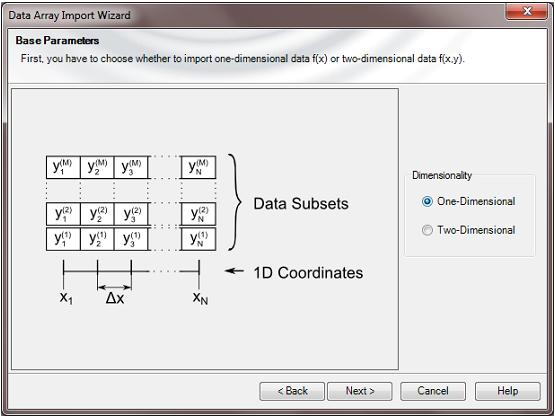 C���\K-�- 7 ��|A,G�H C���\K-�- 7 ��|A,G�H 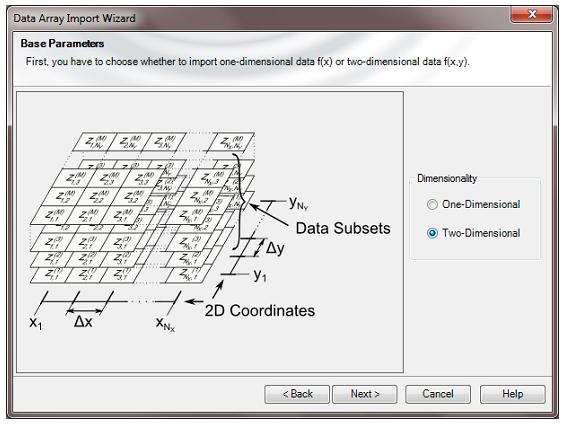
$tJ�J�
>"� �*�a�4eL [ 坐标系描述:用户可以设置对坐标轴的描述,这种描述可以是任意的字符串以帮助赋予坐标轴物理意义。这个教程中X和Y被描述成轴线。 ��
su$juI{
9wzYD�KN�} �'-_��PO|} 坐标轴的物理特性:这个页面可以规定可用轴的物理单位,典型的点位包括:长度、角度或无单位。本案例使用长度作为X和Y轴的单位。 [0�e�mOS
"a7�d`�l�: 4B�
6A�w?� 坐标轴的采样距离:目前这个向导器只支持等距离的数据阵列。用户可以规定每个坐标轴的采样距离。本案例对于每个坐标轴使用100微米的采样距离。 c�e�\-��oT
&,�xM�;8b Ek6�W:Q:@� 坐标轴的起始坐标:数据阵列设置坐标系的起始点。本案例起始坐标为-4.95mm。 D���c2�eY.
~1o�D7=W�N 坐标插值方法:本页中可以分别对坐标轴进行插值方法的设置。可选的方法有:Nearest Neighbor,Linear(Imaginary/Real),Linear(Amplitude/Phase) =T`-�h"E~@ d�E~ns
�,+
坐标系设置: �3l��q�hjA
�=���r2�d{
选择文件用于第一个数据子集: W�F7RMQ51j
Z^���3Risi
设置完数据阵列坐标系坐标轴之后,可以进行数据域的导入。支持以下的数据格式导入:txt,csv,…(text files)\Jpeg,bmp,…(bitmap files) .nN�7*))Fj
���k-/$�8C
/r�6�DPR0\
导入文件选项:选择所要导入的文件后,可以设置导入文件参数。用户可以设置:-Header Lines-Skip Header Lines-Decimal Seperator-Column Seperator ;f?�bb��*1
$qqusa�}`K
kW9���ST�N
用户设置完导入参数,会触发导入数据预览。 p%_T�bH3j`
=/;(qy9.-R
导入向导:数据子集 bPEAG=l�"-
xn�Tky1zq�
这个设置向导对于每个子数据集支持额外的参数定义:-描述-物理特性-实部或虚部(对于复值数据子集来说,需要两个不同的文件来输入需要的设置)。 �Z�J��qmD
ScD9Ct*):C
�hI��
yfF
添加数据子集: ^AN9m]��P�
w�FD�.�3�!
点击Add Subset 可以添加一个新的数据子集。用户需要选择所导入的文件以及设置导入参数。Delete Last Subset 按钮可以用来删除最新添加的子集。 NZ#z{JI�=+
:c�>,=FUT�
s��QkP@Y��
完成数据阵列的导入: Nb��6�HM~�
#�{(rOb6H)
完成坐标系的设置和不同子集的定义之后,会触发数据导入向导的Finish按钮。 [3s~Z8
p�P
c�=5$bo]LI
Wd7*sa3T��
数据设置向导的完成结果 px*MOHq� K
QQ:2987619807 �4d�#W�[
|



