示例.0082(1.0) -O}�)�Y>=} hu-]SG�b�6 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 \t{iyUx��Y
TjpyU:R,&| 1. 描述 /G5K�NSi�� ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 )~M@2�;@L� ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 W� *�0!Z:? ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 F,Y�P�Il�
W{Qb*{���9 2. 系统 ]n=z(2Z9lD 03?AD�jO�� 文件名:UseCase.0082_FocussingSystem.lpd
J5b3r1~D"[ 3. 透镜系统组件编辑 eg�~
Dm>Es
m�I2Gs)�SO
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 ZW M:Wj192
■ 透镜系统是由序列光学表面(OIS)定义的。 hGF�i|9/-u
■ 每一个可选项都有独立的参数,并可以设定。 !��fs ~ �>
■ 包括序列光学表面和光学介质。 iBWz�xPv:z
s=$xnc�}mf �E��[hSL#0 4. 光线追迹系统分析器-选项 M_O�$]^I3w �l>jr�Y�1u padV|hF3(e
■ 分析器允许用户指定使用光源的光线选项。 �+R?�E @S�
■ 可以选择选取光线的方法: [,&g�46x22
— 在x-y-网格 �?Gf'G{^�}
— 六边形 :qS�~"@�?<
— 自由选取 8V(~u^!%�_
■ 每一个可选项都有独立的参数,并可以设定。 Zn1�(�(J7� l="��(Hp%b 5. 系统的3维视图 =�ZH��N]PP �:�WH{wm�| 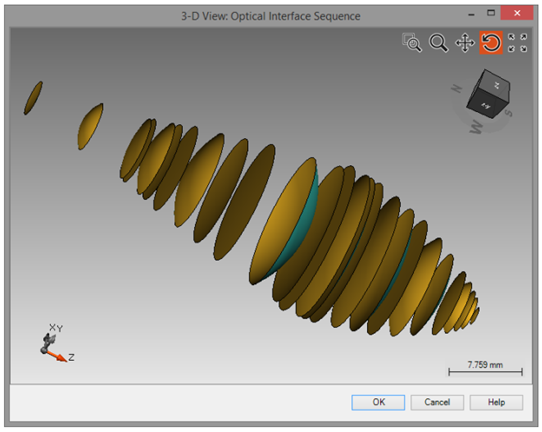 �i K@�RQi�
�i K@�RQi� 光线经过整个光学系统的三维视图
B8cg[;e81� 光线经过整个光学系统的三维视图(局部放大)
h*4w�i��.- .K�940& Ui 9U9ghWH8 ,:.8s>+�i 4Y�OLy\�"S -Hi_g@i*XW 8. 透镜系统后虚拟屏的结果 �b�6�g9!�� 3F6'3NvVc2 �AzGbvBI&V
■ VirtualLab可用于计算点列图。 CE183�l��\
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 8}z �P�Ds
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 4P�2p|Gc3�
■ 你可以通过下面的操作将背景颜色该为白色 I%?�M9y.u6
I%?�M9y.u6
�^�'�)4R�U 9. 焦平面上的结果 U�x,dj�8=o
�8=\k<X�{`
�~9f�Ts4U�
■ 在左侧图片中可以看到焦平面上计算出的点列图。 v&^��N�+>p
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 |bR�i bB�
■ 焦平面上的光斑尺寸为183mm { �F0"�U�=
■ 此外,背景颜色也可以预先设置。 d�76C�]R5L
■ 该测量采用均方根(RMS)计算法。 �6�yaWx�pW ^J?2�[(� � 10. 总结 3e���[k�9` ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 �g2lv4Tiq- ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 I#�yd/d5^� ■ 此外,系统可以直接利用光线追迹引擎进行分析。 OUH�d@up@n ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 � Gw��D"j] �!OH'pC�5�
Iet�V�]Ff6 QQ:2987619807 _i"[m(ABj1



