-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-15
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
文章来源:Geis J, Lang J, Peterson L, et al. Concurrent engineering of an infrared telescope system[C]//Optical Modeling and Performance Predictions V. 2011, 8127. vy7?]}MvV� 1Qjc*+JzO. 摘要: 7)>�L�#(�N
cdI"=�B+C\
我们提出了一种用于设计和分析天基电光(EO)传感器的并行工程方法。红外望远镜有效载荷的详尽设计由机械、结构、热和光学工程师的跨学科团队使用模拟驱动工程(SDE)软件环境开发。望远镜有效载荷设计还包括有效载荷任务的太空段的概念设计。我们还描述了并发设计过程的流程,并提供设计输出。 U3M;�{�_g� z�0�Y��L�, 简介: :.{d,)��G
\O��~��WMN 我们的整个目标是提供一个可靠的产品,以满足其性能要求,并在预算和计划人力范围内实现这一目标。这种类型的项目通常具有三个特点。这项工作通常需要共同拥有解决产品设计和交付所有领域所需的经验和技术知识的不同项目的专家(SMEs)共同努力。第二个特点是每个学科领域的工作通常是在CAD或CAE计算机工具的协助下进行。最后,复杂产品的设计和生产经过一系列设计周期或产品设计的迭代更改来演变,这对于产品开发、解决问题和矛盾等是所必需的。 u�Tl�"4;&j �O��zH\�YN 并行工程通过更有效地整合SME参与者的努力,来处理复杂产品设计和交付的总体目标。通过减少不同学科领域之间的信息交换的延迟和增加信息交换的频率,设计周期可以得到显着改善。减少收敛到满意结果所需的设计周期数需要通过在整个设计过程中及早和经常地深入了解设计问题和矛盾。这能够使我们尽早发现问题,并减少进行返修的工作量。 �1b7?6�CqV ~��dgFr�6� 航空航天公司的概念设计中心(CDC)提供了这样一个环境,其空间系统可以由跨学科工程师团队在各种级别的保真度要求下设计。本文提供了一个示例,说明这种集成设计环境如何用于天基红外望远镜系统的端到端设计和分析。首先从望远镜光学设计的开发开始。然后我们展示如何为有效载荷开发初始CAD设计和结构模型,以及如何集成这两个,允许CAD工程师改进CAD设计,以获得满足发射负载环境要求的最小质量解决方案。接下来,我们展示了如何使用有效载荷设计作为太空段设计研究的输入,其中开发了包含IR望远镜有效载荷任务的空基部分所有方面的顶层设计。研究表明,有效载荷可以由运载火箭容纳,并提供研发有效载荷热设计所需的基本参数(轨道、太阳能阵列大小和位置)。然后开发有效载荷的初始热设计,以及对在轨热环境对望远镜图像质量影响的预测。 d;3�f80Kd* �V.+a}J=Cw 这里提供的说明材料代表了通过整个IR望远镜系统的设计的初始,其为每个技术学科区域提供了坚实的设计起点,以及对系统的不同部件之间的相互作用的物理洞察。现在可以迭代相同的集成模型以纠正每个技术学科领域中的设计问题,同时评估这些设计变化对系统性能的所有方面的影响。 l4I'�,79l� 8@6*d.��+e 航空公司的协同EO传感器设计环境 8�[
Z�uVJ] Oz�xiT� �+ 本文的工作报告由CDC的两个并行设计团队-电光有效负载团队(EOPT)和太空段团队(SST)完成。EOPT是一个小型、跨学科(机械、结构、热、光学和控制)的工程师团队,旨在EO传感器有效载荷的详细设计。通过使用由Comet Solutions, Inc (http: //www.cometsolutions.com)开发的比较新的模拟驱动工程(SDE)软件实现并行工作方式,跨学科边界集成工作。该SDE软件具有以下特性: b�
ts*qx&) XCez�5�Q1 1. 在公共软件环境中存储和查看所有工程数据(材料属性、边界条件、网格划分参数等)和CAD/CAE仿真结果,而无需知道如何运行每个工程学科的基本CAD / CAE工具。 `$J�OFLa� 2. 项目数据以树形结构组成,获取设计历史记录并确保版本控制。 a@�?� Bv 3. 从详细设计中提取顶级摘要数据(质量、图像质量度量、关键参数值),并显示在“控制面板”区域,供工程、系统工程和管理人员查看。 h�y~KY6T�a 4. 复杂的跨学科分析的专业能力可以由学科工程师开发,经过捕捉,在仿真过程重复使用,大大减少了设计和重复这些分析所需的设计周期。 ,W]}mqV%.' 5. SDE软件通过适配器与其他商业现货软件(COTS)工程软件协同工作,允许学科工程师使用他们已经用于日常工作的相同CAD/CAE工具进行详细工作。 f7%g=0.��F mE�b`ET|� 详细的工程设计和分析工作是通过SDE接口访问学科工程熟悉的COTS软件。在航空航天公司的设计环境中,机械CAD设计可以使用Pro/Engineer(http://www.ptc.com)或SolidWorks(http://www.solidworks.com)来完成,结构工作使用MSC Nastran (http://www.mscsoftware.com)或Abaqus(http://www.simulia.com), SM�<q�b0� 热工程利用Thermal Desktop(http://www.crtech.com), r��$��LU$F 光学设计使用Code V(http://www.opticalres.com), f?@M"p�@�T 控制工作使用Matlab/Simulink(http://www.mathworks.com)。另一个COTS软件工具SigFit (http://www.sigmadyne.com)用于将热变化和结构变形转换为可输入到Code V中的形式,以评估其光学性能影响。参考文献[1]中给出了Comet SDE软件环境及其并行工程原理的更多详细介绍。此SDE软件环境对飞行载荷中关键透镜子组件的集成结构/热/光(STOP)分析的优先研究请参考文献[2]。 ,z((?h,nm �'81R��wp� 使用IR望远镜有效载荷的太空段任务的初步概念设计是由SST开发,他们使用了与太空段设计相关的每个技术学科领域主题专家(SME)开发的电子表格工具。系统模块捕获摘要信息,并为每个学科领域开发的模型之间的冲突进行集成和解决提供了一个平台。可用于姿态确定和控制(定向和稳定模式)、天体动力学(轨道参数)、航天器的命令和数据处理、收集和处理数据所需的地面部分配置、有效载荷和地面之间的通信、有效载荷功率和数据处理要求、推进、软件、总体结构要求、遥测和追踪、热控制系统的尺寸和成本。还产生用于支持有效载荷所需的航天器、总线和其他子系统(太阳能阵列等)的概念级CAD设计。SST通常开发一个太空段设计基线,在考虑许多感兴趣的变体之前满足总体任务要求,例如插入新技术或轨道参数的改变。对航空航天公司的CDC和各种利用它并行设计团队的更详细的描述在参考文献[3]和[4]中提供。 �7 lq$Ps�C bDegI�W/'w IR望远镜光学设计 I'<sJ��s*p Y���R)^F|G 望远镜的光学设计如图1所示,其一阶属性在表1中给出。波前误差在整个视场上3.2微米波长处达到衍射极限。选择孔径(60cm)是因为与成本较低的市售运载火箭兼容,例如Minotaur-1或Falcon。带有出瞳的无焦输出适合用作具有多个可互换的MWIR仪器(偏振仪、光谱仪或照相机)的冷光阑。满足我们设计要求的是一个卡塞格伦望远镜,后面是一个空气隙双胶合透镜。增加了调整双胶合透镜的焦点位置的机理,以便在有效载荷的热偏移上保持输出光束准直。基于空间飞行经验和成本选择材料。在光学设计阶段进行的权衡表明,硼硅酸盐反射镜结合钛金属结构,将会提供非常轻的、坚硬的望远镜而且可以同时使玻璃反射镜和金属结构之间的热膨胀系数失配最小。 k?Zcv*[)D+
� =�w�l�0�
�%2?"��x*A
图1:IR望远镜光学设计 表1:IR望远镜一阶属性 �4i�29nq^n 'Rv.6>xq�c
�sB�E@{w%
IR望远镜CAD和结构模型开发 �+xr;X ��9
�?.Ml�P,/K
望远镜的CAD设计开始于将光学元件的STEP文件从光学设计软件(Code V)导入CAD软件(SolidWorks)。光线轨迹还被作为STEP文件输出,它的曲线穿过CAD,可以防止CAD设计开发时基座和测量结构产生光束渐晕。Hub安装方法(图2)和使用准直双透镜作为聚焦结构使次镜处的悬臂质量最小,并提供能够承受发射振动的轻质、坚硬的望远镜的预期。 tg�~7^��(s
图2:望远镜CAD设计 PhmtCp0-7-
iZ(p]�0aP7
然后再从初始望远镜CAD中使用 SDE软件网格划分生成有限元模型(FEM)结构网格。网格尺寸和质量针对每个组件(主镜、次镜、透镜等)进行了优化,然后这些单独的网格被组合成一个统一的网格。1-G重力负载应用于统一化的网格,以确保所有子组件在所产生的统一FEM模型内正确连接。得到的网格如图3所示。 nx�uR^6�Ai
E�/d\e�bX|
然后在SDE软件内创建了将结构分析与CAD设计绑定的仿真过程,以帮助精炼CAD,确保望远镜与所选择的发射环境兼容。该过程包括两个分析任务。第一个是Nastran任务,用于分析望远镜的频率响应,假定边界条件刚性界面在双脚架双脚之间用于将望远镜附接到宇宙飞船。该分析的品质因数是结构的第一基本振动模式的频率,其必须高于25Hz以满足总线发射要求。第二个任务评估望远镜结构中的Von Mises应力水平,此时它暴露了三个主要横向方向中的每一个的准静态载荷。我们使用的负载大小(20 G)源自Minotaur I用户指南中提供的曲线图,该曲线提供了作为有效载荷质量的函数的G的预期净重心中心(CG)加速度响应。如果我们的结构模型计算的最大Von Mises应力水平对20G载荷的响应低于钛的极限强度(220Mpa,安全系数为2X)和钛的屈服强度(140Mpa,安全系数为1.6X),两者均具有至少20%的安全裕度,我们的望远镜结构认为足够坚固可以承受发射载荷。 �I(��9+F
|A H@�W#7j
图3:望远镜结构网格 �`J��l_'P}
YZ5[#��E@l
图4显示了通过SDE软件界面用于此结构分析任务的一些显示功能。捕获刚刚描述的结构网格和分析任务的模拟过程与CAD模型视图、结构网格和望远镜的基本振动模式一起显示在显示器的上半部分中。显示器下部的控制板捕获设计的品质因数,例如质心、转动惯量、基模频率和最大Von Mises应力水平。一旦该仿真过程由CAD和结构工程师设置,CAD工程师可以重新使用它来微调CAD设计,而不需要CAD和结构专家之间的进一步切换。例如,CAD工程师能够改变支撑第二反射镜的三个叶片的厚度参数,通过对于不同的厚度值重新运行模拟过程并且在他对CAD设计进行期望的改变时评估所得到的品质因数的变化,可以在不到半天内找到仍满足运载火箭的振动模式和材料强度要求的最小质量设计。 V8z*m��n�D
图4:IR望远镜对发射负载响应的结构分析 @<p9��O��0
'\LU 8�VC�
IR望远镜空间部分的概念设计 �&.��"ltB�
1��++��F�s
SST设计作为发射任务合并到了IR望远镜CAD设计。图5示出了IR望远镜有效载荷与航天器和期望的运载火箭的集成。针对空间段任务的所有方面开发了顶层设计,包括增长25%的偏差的质量和功率估计,表明设计符合航天器设计和运载火箭的能力。在这里,对于我们的工作特别重要的是,为有效载荷开发的热设计-轨道、有效载荷几何形状和太阳能阵列尺寸-是SST研究的产物。 qo}u(p�Oj|
图5:集成航天器和运载火箭的有效载荷 z%/<|`
��7
�+�hMF\��@
IR望远镜有效载荷的初始热设计 ��A:,��V)�
#r80F�VwiD
用于热分析的航天器、太阳能阵列和IR望远镜有效载荷是由CAD有限元网格设计的。热网格在光学元件中融入了更多的细节,而航天器结构中的细节较少,以便减少模型运行时间,同时在需要时保持足够多细节。通过SDE软件界面将材料性质和表面处理应用于几何形状。 通过使用SDE软件接口定义的热接触器,实现了各种望远镜部件的电导耦合。根据典型的热界面指南将部件固定在一起的螺钉数量计算接触器数值(参考文献[5])。 ��;��DI"9�
!%G;t$U=M
对于第一次设计迭代,模拟了冷的热环境。该环境包括β= 0°轨道,其中轨道平面平行于太阳矢量,如图6所示。当望远镜指向地球以收集数据时,对于初始热分析可忽略短时间段。 使用航天器热控制手册(参考文献[5])选择标准冷的热环境参数。由于航天器参数在这一点上很大程度上是未知的,所以选择恒定的冷航天器温度-20℃,并且多层隔热材料(MLI)应用于航天器的顶层。 �h,2?+}Fn�
yTU'�voE.|
第一热分析情况不包括围绕望远镜的镜桶,但是这导致在光学器件上的不可接受的大的热梯度。这些梯度是由于望远镜的一侧面对地球或整个轨道的空间,另一侧面向太阳能电池板的背面。 除了在日食期间,太阳能电池板面向整个轨道的太阳。太阳能电池板的背面涂黑以反射热量,并且这种高发射率表面在望远镜上引起显着的热后负载。 x@<!�#��d+
BlfW~l'�mx
为了减少太阳能电池板后负载的影响,在望远镜周围增加了一个桶。这个复合桶直接作为有限差分表面添加在Thermal Desktop中。内筒表面假定为涂黑的,并且外表面假定被镀铝的卡普顿MLI覆盖。MLI和桶将主镜中的横向温度梯度降低到约3℃。总体温度分布示于图7中。 ?B:�],aztf
图6:表面处理和冷情况轨道参数 )0�� i$Bo 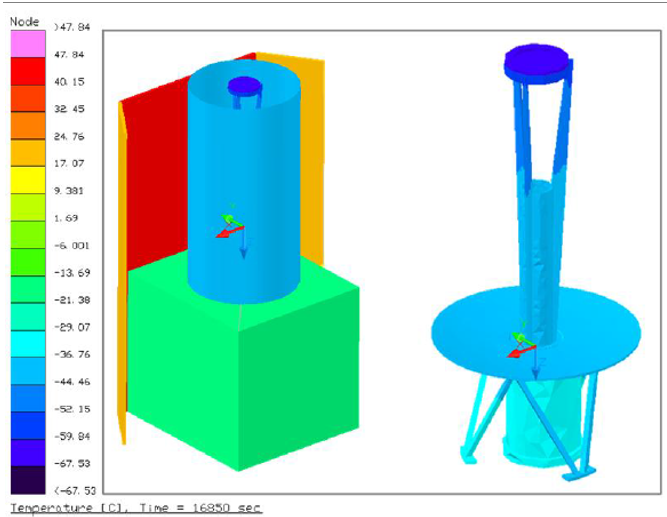 图7:冷情况温度分布 ;UWp0d��%
@S�� Quc��
被模拟的冷情况是极冷情况,并且可以有多种方法将光学器件温度提高到更高的温度。这些设计方法包括使用更高的运行航天器温度,或给桶结构增添加热器。我们的初步分析也没有考虑在成像期间重新定位航天器。当面对地球时,这种重新定向将加热光学器件,并将包括在未来的研究中。这些设计更改将在设计的后续迭代中考虑。 _�v=z�F�pR
<+;
cgF!�+
热环境对于光学性能影响的评估 U{-[l�p�d�
�lt��XGm)+
在SDE软件环境中设置图8所示的模拟过程,以评估结构/热/光(STOP)对IR望远镜的光学性能的影响。图7中的温度分布映射到Thermal Desktop内的结构网格上,Nastran用于计算由这些热偏移产生的结构节点位移。温度分布和结构节点位移输入到一对SigFit任务,计算每个光学表面的最佳拟合刚体运动,和由热环境产生的光学表面高度形变的Zernike多项式表示。对于每个折射分量计算附加的Zernike多项式集合,以给出由这些分量内的热致折射率变化引入的波前误差。包含由SigFit计算的刚体位移和Zernike多项式形变产生的新序列文件输出到Code V用于评估光学性能影响。 �T`|���>oX
q3�Y���49d
图8:STOP分析的仿真过程 VDPq3`$+v{
coc�:$S�r%
我们对于冷情况的波前误差预测在图9中给出。存在大量的聚焦误差和球面像差,主要由主镜的变化支配。图10示出了沿着主镜的光轴的结构节点位移的分量。穿过孔径的节点位移的总量值与在主镜图变化的Zernike多项式映射中示出的峰谷表面高度误差相近,并且这些图形误差的幅度远远大于曲率半径的简单变化,这对应于反射镜的恒温温度的变化。在设计和分析的这个阶段,用于结构模型中的hub基座的主镜和钛安装环之间假定硬接触。在安装界面处,为防止不切实际的高应力所需的弹簧负载在模型中不存在,并且由于在底座和反射镜之间的热膨胀系数的不匹配,在较大的恒温温度变化下,主镜有比较大的弯曲,结果如图10所示。镜面底座的热设计和保真度将在下一个设计周期中更新。 �l)91v"vJ�
图9:波前和表面高度误差预测 4 !M6�RL8{
)mRKIM}�*W
图10:主镜结构节点位移 Kl+4�A}�Uo
;Q%��3��WD
总结 [$%0[;�jtS
4�S,/Z{ J.
通过IR望远镜有效载荷的示例,我们提出了用于设计空间传感器EO的并行工程方法。并行工程旨在更好地集成设计EO有效载荷所需的各种工程学科的努力,从而减少在学科之间交换信息的延迟和错误,同时设计周期(即随着传感器设计变化,执行单个迭代改变所需的时间)也大大减少。例如,一旦建立了集成STOP分析的仿真过程,即使是复杂的光机EO有效负载,小型设计更改或不同热环境对图像质量的影响也可在一天或更短时间内重新评估。 ��;JR_z'<�
I�Hf#�P5y_
这里提供的说明材料代表了通过整个IR望远镜系统的设计的初始,其为每个技术学科区域提供了坚实的设计起点,以及对系统的不同部件之间的相互作用的物理洞察。现在可以迭代相同的集成模型以纠正每个技术学科领域中的设计问题,同时评估这些设计变化对系统性能的所有方面的影响。 m}fY5r<<;/
("j*!�Dsd
致谢 �0�5vu�{>
U7Pn�
$l2!
作者感谢来自美国空军学院2011级和2012级的学生们的参与,他们直接与航空航天公司概念设计中心的主题专家直接合作,开发适合于托管IR望远镜有效载荷的候选航天器概念设计,达到了初始任务要求和审核要求。航空航天公司的高级管理层和美国空军学院(USAFA)全体成员共同努力,为未来的军事领导人的太空应用并行工程提供了实践培训。 N!=Q]\ZD��
�b��'y�W+�
%Z6\W;
�(n
QQ:2987619807 t��M{U6�k
|



