VirtualLab Fusion 软件能够设计用于激光光束整形和传导的透镜和反射镜系统。 Ii,:�+��o% �;dFe >`�~ 折射透镜和反射镜系统的设计是激光光束控制的基础,如:
YiCDV(prT 准直 1w�g�u%$|d 聚焦 lX��4p'R-h 光束传导 `�SwnK���g 激光扫描仪 ��<di_2hN� 横向光束整形 J7_H.RPa�� VirtualLab Fusion软件能够对使用光线追迹方法设计的激光系统的性能进行进一步的提升。可通过参数优化和蒙特卡罗公差技术,并结合经典场追迹模拟引擎(其考虑了衍射和偏振的物理光学效应)来实现。 qC4-J)8�Wk _)l %-*Z7p �6-=_i)kzq
用于发散激光二极管聚焦的折射型激光束传输系统。利用VirtualLab Fusion软件可对系统进行仿真和优化 :}JZ�Kj!}M
u7�=[�~l&L
VirtualLab Fusion 软件的特点 �~/U�0S.�C
参数优化 ?},ItJ#>)q
蒙特卡洛公差分析 1;P\mff3Y
真实激光源建模 �*��0�2( J
倒置光束整形设计 V����"p�<A
折衍混合光学组合 ��EDo@J2A�
结合光线追迹和快而准确的物理光学以进行系统仿真 |u{Q�I3#'
易于使用的定位概念 ��mb/[2y�<
试用版软件及应用实例 !��-c*lb�
想要获取更多的信息?请发送邮件至support@infotek.com.cn 与我们联系,或者使用VirtualLab Fusion 软件试用版来运行我们的应用案例以考试您的体验。 eC$v�0Gt�q
BDS.0001: 利用物镜对半导体激光光束的准直(download) {Pb^Lf�� >
BDS.0002: 非球面后焦点的研究(download) ��K|G�$�s�
BDS.0003: 用于激光束聚焦的双胶合透镜优化(download) ~&}�O|B()
现在就下载VirtualLab Fusion试用版Download Z�~(X��yaN
x3s^u~C)(w 光束传输系统(BDS.001) ��j��EsTw_
%�-l�:�_�A
物镜二极管激光器光束的准直 >D/~|`�=�p
�c2�^7"��`
$)3����P�F
1. 系统说明 rl%�Kn^JJ~
aHC;p=RQ\A
光源 qYiAw��K$�
— 发散的红外激光二极管 �!7)ID7d��
组件 >p*�HXr|o$
— 通过折射透镜系统对发散的二极管激光光源进行准直 Fw�9``{�4w
探测器 wP/9�z(U�S
� W6���O.E
 9@Sb! 9h��
9@Sb! 9h��
3�~</l�Am;
建模/设计 @'*#]�Y�U8
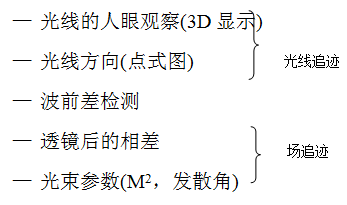
— 光线追迹:首先了解系统和波前差计算 �3}2�1�bL
— 场追迹:激光剪切对光束质量的影响 h!K2F~i{P
d��&bc>V�t
2. 系统说明 UWp8I)p!\O
z,�|%?
1
uAs*{��:4n
3. 建模&设计结果 t4_K>Mj+d
� vkp�V,}H
4. 总结 MN�qy�Ec""
Nox�z kpMF
对于一个准直发散激光二极管的透镜系统的性能的探究,可通过: 23$�hwr&G\
第一步 uS��#Cb+*F
光线追迹评价对波前差的计算 �<�88}+�j�
)m��8>�w6"
E�$�tk1SVo
�
�hu(K!>{
第二步 \�~t~R ��q
场追迹评价光束剪切产生的衍射效率以及其对光束质量产生的影响。
�-0SuR�E�n 光束传输系统(BDS.0002v.1.0) m�]d6�@"Z.
a���R�K�Ry
非球面后焦点的研究 f_h"�g�ZWV
0t/y~�TrBY 1. 系统介绍 SP7g�� qM� 光源 rg^\BUa-W, — 具有发散角的红外激光二极管 zX�PJ;^Xxa 组件 $lAb��6e$n — 准直折射透镜系统及非球面聚焦 k*3_)
S
�- 探测器 c9TAV,/fF* — 点列图 �pZ~>��l=- — 波前差 T�{4fa^c2J — 聚焦区域的1维和2维探究 ,35:��Srf| — 光束参数 ��gpK_0?%� 建模/设计 u�AS8F=9xP — 光线追迹:最初焦点位置检测。 �tW.>D;8�� — 场追迹:包含衍射效应的更精确的焦点研究。 y2"S\%7$h�
vDe�G20.?Z
2. 系统说明 :��.��[5('
JJ9e�{~0�I �RrU~"P1C�
3. 建模及设计结果 a-A�+.���7
2<o[@�w���
1X��"H6j[w
<6b��\i�5j
4. 其他VirtualLab 功能 �8wp�wJs&V
在该示例中,你可以收益于如下所选的功能: G�'?f�!fz;
一个非球面透镜的聚焦能力的分析 Ed&�,��[rC
确定焦点位置,通过: pL}j
��ZTo
— 焦点寻找工具 V�WA�-?%�r
— 参数运行文件 lDPRn~[#�\
— 光束参数探测器 �KT�;C RO>
a�RO_,n��9
)-?�uX�.E{
获得不同的信息/说明性的结果,如: �zN�r_�W[
— 透镜像差 =PKt0�9b�^
— 光束质量:光斑尺寸/形状,M2值 wdcryejCkr
— 不同的2D&3D图以证实聚焦的变化 N� 1f~K.e\
�W3{�<e"��
 K~y�9z��F{
K~y�9z��F{
`b#nC[b6|v 5. 总结 ),�p��]��n VirtualLab能够: �w[�YkT��v 利用场追迹,高精度的确定焦点位置 Y���6<�0�% 可通过两步确定位置: ~?`9i>3W�~ — 通过光线追迹快速焦点寻找 G�9'YgW+$7 — 利用场追迹进行焦点的高精度研究 �\B>[je-d
���??z�ABV
��8�~s�-�t
光束传输系统(BDS.0002v.1.0) n���L�+�YL
��OZC/+"\,
用于激光束聚焦的双胶合透镜优化 }Cmj�(k`�~
�x#F1@r8R
HDSA]{:�sl
1. 系统介绍 Ca5Sc, �no
光源 |Y8M�k2�,s
— 具有发散角的红外激光二极管 qS�C�~^N`
组件 9�B#)h)h(=
— 折射准直系统及具有聚焦特性的双胶合透镜 dW{o+9�nw�
探测器 HzG~I8o(�d
— 点列图 cEdz;�kbUM
— 波前差 :L [��Y�mZ
— 聚焦区域的1维和2维探究 ��+�6#%�P�
— 光束参数 �OH�tgn�
建模/设计 >�d27�[%�
— 光线追迹:初始优化。 #zSi/r/=�1
— 场追迹:进一步降低光斑尺寸。 =�hugnX<�9
]��cLEuE^&
2. 系统说明 S�4�k�^&$;
`�Dz�]�z_
0+n&Bk��S' 3. 建模与设计结果 K.V!@bPlw9
�@wEKCn|}o
*2"�bG1`� 光束参数的参数优化 �-V�reBKn� J/�]o WC`u 2�sd �) w� 4. 总结 �C>J�ekPeM 对使用光线追迹所获得的透镜,应用一个基于场追迹的优化步骤,可以改善透镜设计。 *@ <�8&M9x 第一步:利用光线追迹进行预优化进行快速仿真以获得合适的场追迹优化起始点。 V`R)#G>IH% 第二步:将衍射效应考虑在内,使用场追迹进行精细化优化。 z,}�c?B��P



