摘要 fu�Q��?�@F >zX�w4=�J� 用于增强或混合现实应用的任何类型的光导
系统,其设计过程中的一个主要部分是用于输入耦合器、输出耦合器和出瞳扩展器
光栅区域的配置。为此,对光传播以及发生的光栅相互作用进行快速而简单的概述非常有帮助:足迹分析。借助足迹和光栅分析工具,VirtualLab提供了一个强大的工具,可在此过程中为
光学工程师提供支持。在本文档中,讨论了这个多功能工具的选项和功能。
Z[�|(}9v?~ �P�\SE_�*& 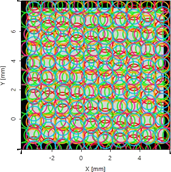 ,rQz�nE1e /+%1Kq�.hP 足迹和光栅分析工具 ��8�He^j�5
,rQz�nE1e /+%1Kq�.hP 足迹和光栅分析工具 ��8�He^j�5 足迹和光栅分析工具是光导工具箱黄金版的一个特色。
(Z�DRjBth[ 它可以在开始功能区的光导部分进行初始化。
}�nu�hLt�1 o �<sX6a9e 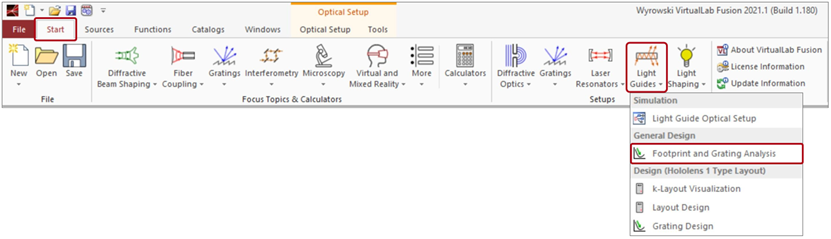 �N�FsM�c0{ &AC-?�R|Dp 操作工具的基本流程 �an.)2�*u�
�N�FsM�c0{ &AC-?�R|Dp 操作工具的基本流程 �an.)2�*u�
x2;92I{5C,
 `XQ�M�)�A� Z|E( !"zE9
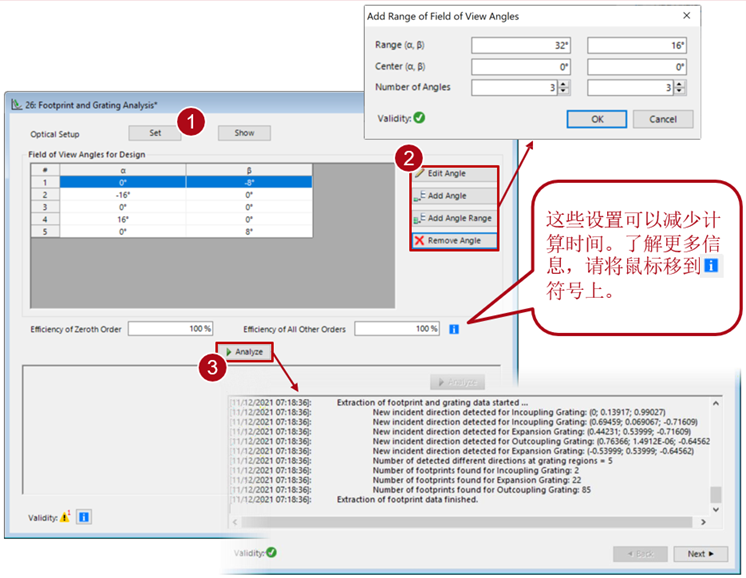
`XQ�M�)�A� Z|E( !"zE9 步骤1:选择要分析的设置。它可以通过布局设计工具生成,详见:
'�R= �r9_% �6X)�8�vQH 光导布局设计工具 B2�VUH..am �jR�zR`>5� 但是请注意,足迹和光栅分析工具并不局限于特定的布局类型。您可以加载文件或直接从已经打开的文档中选择一个文件。
&`{%0r[UD# W&)O�i�ZN  T�R|�G4�l? sy4$!,W��:
T�R|�G4�l? sy4$!,W��: 步骤2:定义该工具应该考虑的
视场范围。
R�|�Y)ow51 步骤3:单击分析按钮。关于分析进度的详细信息将在按钮下方的面板中提供。
��ta��w
#r WC0@g�5;1[ 理想和实际光栅结果 Bx;��b���c t�vZpm@1�� 足迹和光栅分析工具的结果可以分为两个方面:
$}��N'���m @:X�~^K��. 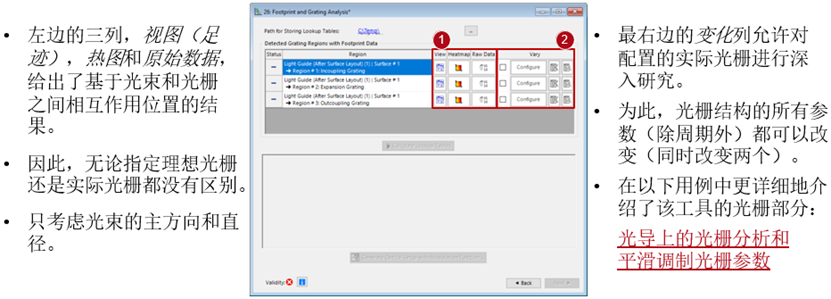 �F(�:+[�$) Gb\}e}TB[� 相互作用的足迹数据 bu�q3t�+0�
�F(�:+[�$) Gb\}e}TB[� 相互作用的足迹数据 bu�q3t�+0�
pJ��1��G�B
 $U3s:VQ��' ybcQ��,��e
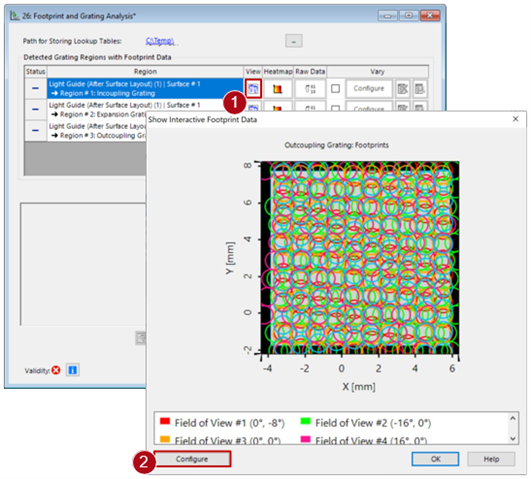
$U3s:VQ��' ybcQ��,��e 相互作用的足迹数据文档提供了一个所有
光束足迹打到一个给定的光栅区域的彩色编码插图,配置视场(FOV)的不同模式有不同的颜色。用户可以选择在图中显示的视场模式。
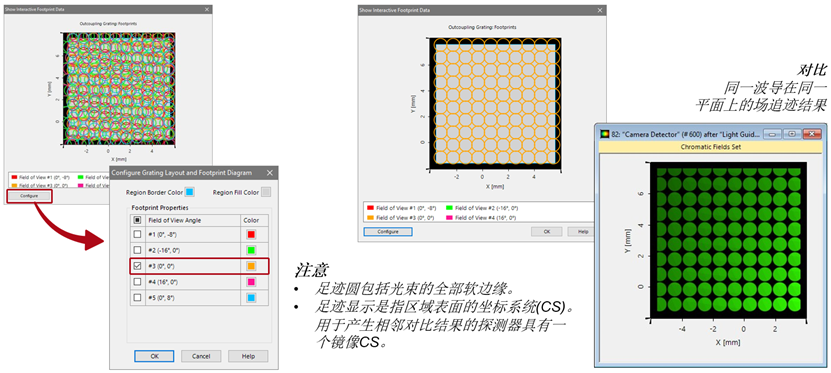
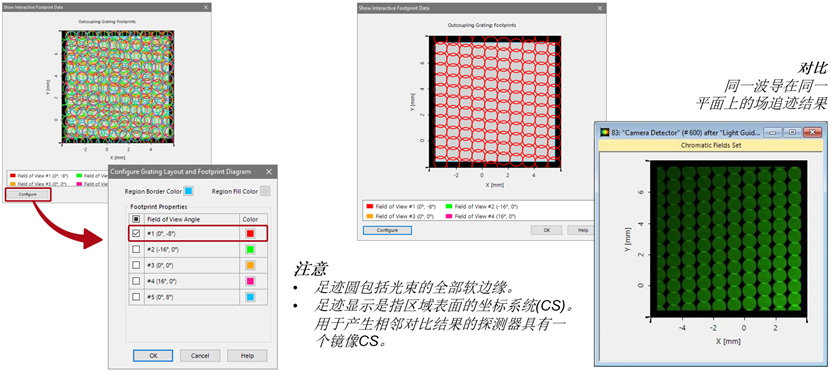
5�Tk�h�6�s 注意
4,�
8gf2� 如果 VirtualLab Fusion记录了部分入射光束,则取决于基本光路中的“通道
分辨率精度”设置。
qK#\k@���E 无论这个区域的光有多小或如何调制,该显示都不会区分,并且将始终描绘完整的、相同大小的足迹圆。
��="���z\� �Z��I-�)'� 中央视场的数据 �P��8piXG�
>DpnI�W�n�
 e=QnGT*b5� ��Jx(%�t<2 倾斜视场模式数据 aa�8W��Rf�
e=QnGT*b5� ��Jx(%�t<2 倾斜视场模式数据 aa�8W��Rf�
=�&< s*-l[
 .�^fq$7Y}7 AS'a'x>8>, 热图文档 x/R|i�%u-s
.�^fq$7Y}7 AS'a'x>8>, 热图文档 x/R|i�%u-s
8it|yK.G@&
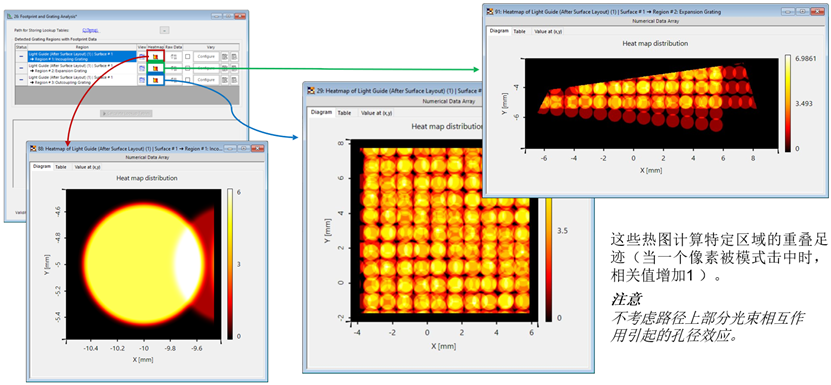 ��JO1KkIV� M8Q-�x�-7� 足迹原始数据文档 �V�.>'\b/#
��JO1KkIV� M8Q-�x�-7� 足迹原始数据文档 �V�.>'\b/#
�IX,/ZO�Z|
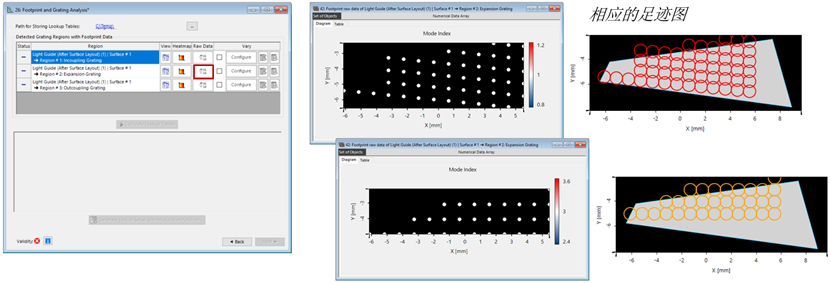 P] ouLjy�q =AUR]&_�B�
P] ouLjy�q =AUR]&_�B� 原始数据结果描述了每种视场模式下每个足迹的中心位置。
<{JHF�U`^� 这一信息可用于确定相互作用的数量,并可作为在需要创建具有调制功能的光路时考虑适当支撑点数量的基础。后者在用例“光导上的光栅分析和光栅
参数的平滑调制”中有更详细的解释。
�)W(?wv!�, �:��D�Cj2" 文件信息 m&EwX ^1- 0,{�Dw9W:  �HF�B2ep7N ej]^VS7w[r 延伸阅读 b�o�4 :|Z [j`It4�^nC
�HF�B2ep7N ej]^VS7w[r 延伸阅读 b�o�4 :|Z [j`It4�^nC - 光导上的光栅分析和光栅参数的平滑调制
i�\�X�Ok!� - 光导的
结构 25�NZIal<� - 具有光导元件的“HoloLens 1”型布局的建模
dyC: M�ko= - 光导布局设计工具
l%oie1g �l - k域布局可视化
��kzMCI)>" - 具有1D-1D光瞳扩展器和真实光栅的光导
模拟



