激光扫描系统(LSC.0001 v1.0)
TKm���C�/c 使用非球面
透镜对激光扫描系统进行性能分析
zg�O��?%O �dx~�F� �[ 应用案例概述 ��rs�IjpPa �"\B�Li C� 系统细节 is6JS�^Q �5$y�<�nMP 光源 ��9�eV�@�v - 绿光二极管
FN��Znz7� 元件
wp@c;�gK�7 - 双轴振镜扫描仪
r�Vz#;d!`z - 非球面透镜
2Aff3]-:Gd 探测器
�Bt�j�sN22 - 场曲和畸变
Sd{>(YWx~� - 光束强度剖面
l��
��lQ<x - 焦点区域探测器
m��x�XQBmW - 光束
参数 f�'}23\�>� 模拟/设计
Hiw�{1E:rW -
光线追迹:分析场曲和畸变,场追迹引擎的探测器的定位
�/��� ]I�] - 场追迹:考虑衍射效应,进行更精确的光束尺寸和剖面的研究
=n;ileGm+^ �]o_ P�s| 系统说明 �LNr2YRpyz JNZKzyJ9�K Q�:%gJ6�pa @ws3X\`�<C 激光扫描系统的性能评估 B�le� <n�6 ��r�R."_Z2 一个激光扫描系统的扫描
光学部分包含了一个扫描仪单元和一个非球面透镜,在一维扫描过程中(沿入射角Theta),通过分析光束的场曲和畸变来评估其性能。
V�NPuO�U= 此外,计算了不同扫描位置处的光束尺寸和轮廓。
�jtd{=[STU �
v�H`�u� �ty(F;M�(� 模拟设计结果 �Ha;^U/�0| u��<�)�:gI {A�t��1]>� VirtualLab Fusion的其他特征 x; :[0(st} 9��6 C��|R 在本例中,您受益于以下选择的特征:
vZ�|m3;��X 各种探测器
{y� ��:/9 - 使用场曲和畸变探测器(Field Curvature and Distortion Detector)中的找到焦点位置工具(Find Focus Position Tool)来测量焦点和光束位置
lS}5bcjR=k - 使用焦点区域探测器计算焦点区域中的场
)82x�)c<�e 参数耦合
�\+
K
��^G - 调整与理想输入扫描光学扫描角θ镜子的方向有关
�rU��(N@i% 参数运行
;�@Ls�"+�g - 生成场曲和畸变图
G���T*�\gZ �&�x\u.wIa 总结 �,u!��c�|4 VirtualLab可以
� M�)Y`u� 模拟使用双轴扫描镜和特定的光学扫描的激光扫描系统
_ 57m] ;& 分析目标平面上的光束偏转
I2D<~xP~2+ - 通过光线追迹来计算场曲和畸变
�#Mi>�f4T; - 通过几何场追迹来计算光束剖面
zX|���CW�; - 场追迹可以更准确地分析光束焦点
ij%\l�d9kd �bp;���)�* 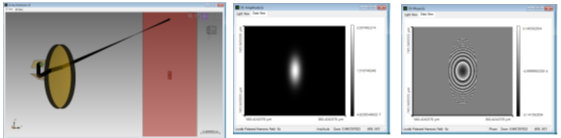 �s�kr^m%�W L�kN�C8V�� 应用案例详述 R�$NH �[Tz
�s�kr^m%�W L�kN�C8V�� 应用案例详述 R�$NH �[Tz 系统参数
�C S�+6!F] x1wm�]|BIf 应用案例内容 oE)tK1>;�H LSC.0001和LSC.0002为激光扫描系统。
=|=��9\3po 在这个例子中,分析了作为扫描透镜的非球面透镜的场曲和畸变,以来模拟一个扫描过程。
|Q.t�]TR'P 在LSC.0002中,演示了通过使用F-Theta物镜来提高性能。
G+=&\+{�#4 F5:4� B]ZF 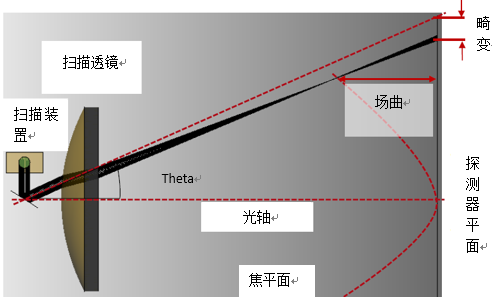 Cd]d[{NJ�; c.�,eI�iL� N�%n�#�mV; 模拟任务 hAKyT~[n�0 8K7��zh�.E
Cd]d[{NJ�; c.�,eI�iL� N�%n�#�mV; 模拟任务 hAKyT~[n�0 8K7��zh�.E 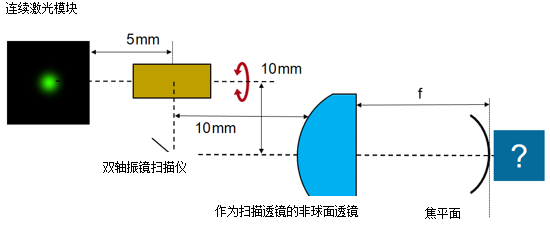 �^�o�65s�M
�^�o�65s�M 为了评估激光扫描系统的性能,在一维扫描过程中沿着入射角θ探测场曲和畸变。
hP,Sv�N#!2 v~uQ_�ae$> �2�r<U�Y�B 规格:输入激光光束 7�4xI#�`E� � &EV|knW� 激光组件中的单模二极管
激光器 �5f��SDdaO ,r�+=>v�re 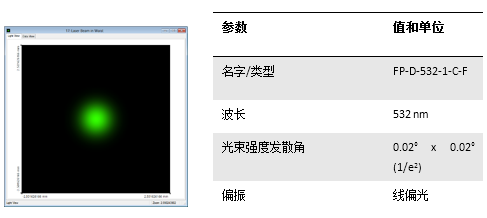 I
Yj\t?,0� _ i�.�CvYe 规格:双轴振镜扫描仪 t&eY+3y,T }�m��k9�-7 &}wKC:LSP
I
Yj\t?,0� _ i�.�CvYe 规格:双轴振镜扫描仪 t&eY+3y,T }�m��k9�-7 &}wKC:LSP 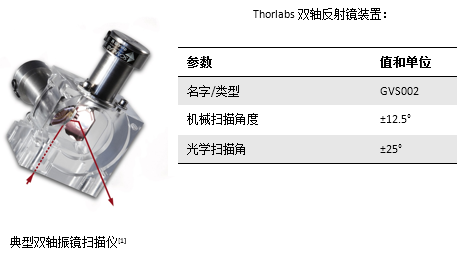 �CSR���6�� _|x�%M}O}, 规格:非球面透镜 w[UPoG #Uh {����>�pB�
�CSR���6�� _|x�%M}O}, 规格:非球面透镜 w[UPoG #Uh {����>�pB� 从Asphericon目录中选择一个凸平面(convex-plano)非球面透镜作为激光扫描系统的扫描光学透镜。
��) yRC$7I 45�W:b/n\�  Yk�6f��r~b GL�9R
���5 原始透镜(目录和网址) �>d��n[oS, kT�[�]^Jtc
Yk�6f��r~b GL�9R
���5 原始透镜(目录和网址) �>d��n[oS, kT�[�]^Jtc VirtualLab“LightTrans定义”的元件目录包含例如Asphericon公司的透镜。
�i�=#r JK= 此外,在他们网站上Asphericon还提供了VirtualLab文件。
JIj�q�GxR� lD _
��� u 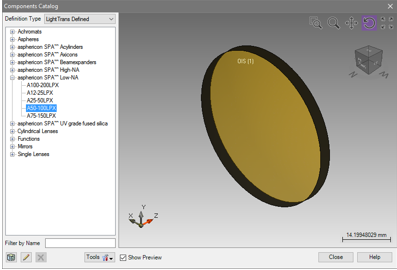 6�^s]2mMfk 0[x?Q[~S_0 应用案例详情 =3���}@\f# Wi'BX#xC�B
6�^s]2mMfk 0[x?Q[~S_0 应用案例详情 =3���}@\f# Wi'BX#xC�B 模拟和结果
�M�%1-f�d ^4`q�%�_vm 双轴扫描反射镜的位置 gh[�'�T,�
U�W.�� F1)
 P�Ql�G�!�� H�vnak��{5
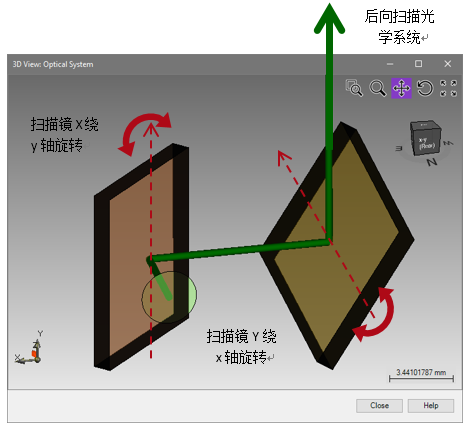
P�Ql�G�!�� H�vnak��{5 双轴镜子同样由两个分离的镜子组成。
Yono8M�;9* 第一镜将目标光束偏转到x方向,而光束沿第二个镜子的旋转轴偏转。
^-f5;B`�\i 第二反射镜将目标光束偏转到y方向。
g��Pd:�>$
cJ�GA5m/{I 设置扫描镜
�\V�+$2
:A b^�;19]/RW 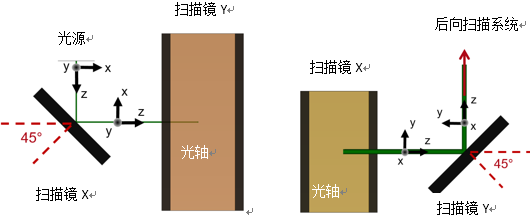 VQ�$=F8ivG �6Bo~7gnc
VQ�$=F8ivG �6Bo~7gnc 扫描镜X沿y轴旋转,使用基础方位角进行旋转,与光轴之间的角度为45°(见左图)。
_C��)�u#]t 扫描镜Y的调整是相当于绕x轴的旋转(见右图)。
eWhv X9�
< 请注意,在VirtualLab中坐标系统是根据反射定律来旋转的,光轴是沿方向z ⃑来定义的。
pz:$n_XC�} 两个镜子的基础方位角定义了激光扫描仪的中心位置。
B@63=a*�kG 使用镜子的绝对方位角,相对于固定的中心位置(光轴),光束在x方向和y方向上偏离。
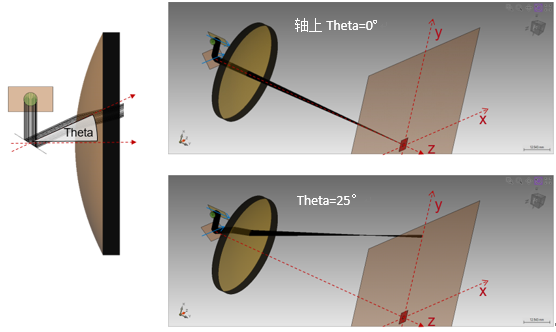
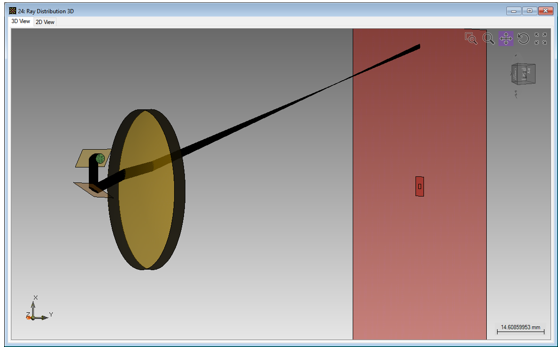
.1t$(�]CyC vpMNulXb�, 轴上的3D光线追迹分析 T�=�o�x;r �O�V;���Ho 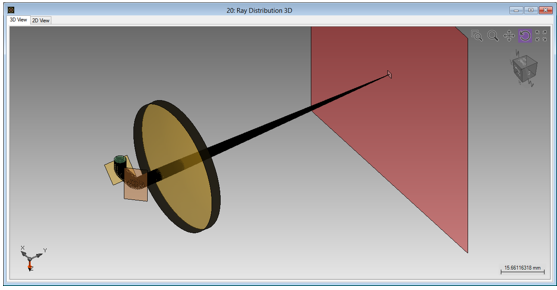 .]k(7F�!W F��wBk�tuS 不同Theta角的光线追迹说明 a��'��
.o
.]k(7F�!W F��wBk�tuS 不同Theta角的光线追迹说明 a��'��
.o
�Ni(D�[?mZ
 _�g0
qpa� 3r%�I� �*
_�g0
qpa� 3r%�I� �* 在光学扫描系统前定义输入扫描角Theta。
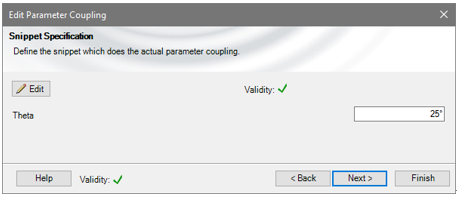
'N,x=1�R�5 OE}L�})��" 通过参数耦合进行系统调整 �]��zhFFq` A&Ut:O�iA 对于一维扫描过程,使用参数耦合工具。
_�U.8�\J2 ?P4�`����� 扫描镜Y的绝对方位角是自动设置为期望输入扫描角。
BY�hPO�g[� H
\.E�K�Z� 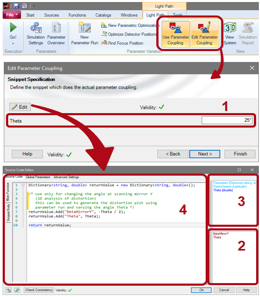 /:�z�}WAW� 0Dc$nL?TqX yV$p(+�KkS
/:�z�}WAW� 0Dc$nL?TqX yV$p(+�KkS 1. 用户输入扫描透镜期望的输入扫描角度2. 系统参数
>D��jv�8 0 3. 输入变量4. 源代码编辑器(脚本定义)
MP w@O0QS� VrQ�w;-rQ� 离轴25º的3D光线追迹分析 8�T&�m{��s
bO9F �rEz5
 :kOLiko!4>
:kOLiko!4>
s%H5Qa+U�h
 n)sK#�C-VA :uu�\q7@'� 场曲和畸变探测器 x1�|�5q/I� �x�*}(l%[
n)sK#�C-VA :uu�\q7@'� 场曲和畸变探测器 x1�|�5q/I� �x�*}(l%[ 通过寻找焦点位置工具(Find Focus Position Tool),场曲和畸变探测器可以测量3D焦点位置,且光束位置依赖于在扫描光学之前的球形输入角θ的在屏幕上的测量光束位置。
6i9m!�YQV� 因此,必须通过参数耦合工具给探测器提供θ的输入角。
o-(�"S�|A- �rQ30)5^V| 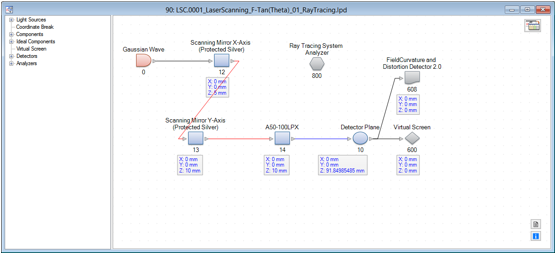 zb��l�h_6� �RgRy��o�
执行扫描过程 85w
D<bN27
zb��l�h_6� �RgRy��o�
执行扫描过程 85w
D<bN27 对于扫描过程角度θ,通过参数耦合工具来设置扫描镜,沿着y轴从1°到25°扫描,步长为1°。
Kcsje�_I-M 只有沿着y轴扫描,弧矢焦点由x方向的光斑尺寸决定,子午焦点由y方向的光斑尺寸决定(后面将会介绍弧矢和子午平面)。
I�W$&V`�`v 从参数运行文档,可以绘制场曲图和畸变图。
h:��a5FK�@ 使用一维数值数据阵列多重图表模式将子午(1)和弧矢(2)场曲和畸变数据结合在一起。
3543�[W#�a �ag�:�#82C 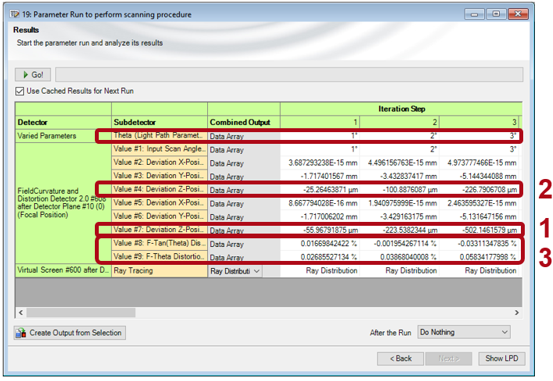 wAF>C[�<\� l.;�y`c�s� 场曲 /U�N%P2>^1 A�Wh�{d�M
wAF>C[�<\� l.;�y`c�s� 场曲 /U�N%P2>^1 A�Wh�{d�M 通过光线束的焦点到探测器的间隔∆z,沿z轴来测量场曲 。
M�GN*i9C�E 因此,在两个分离的平面,焦点是通过(RMS spot radii)均方根半径确定:子午和弧矢平面。其如下图的一个
成像光学系统所示,类似于激光系统。
eq(|%�]a�= 对于一个平面成像面,这是测量离轴光束的离焦的一个标准。完美的图像应位于曲面而不是一个平面。对于一个激光扫描系统,这一点是必须考虑的。
n!ea�)�+�^ )#xd�]~�<� 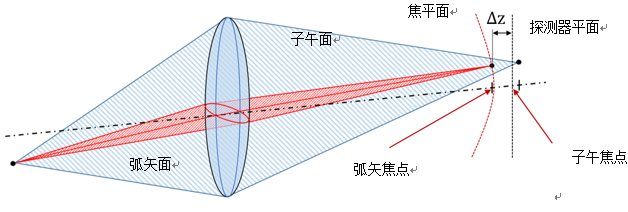 /n�@�_Ihx� &EE�6<-B-� 场曲率 �Tca�uC�L� uLe+1`Y5Ux
/n�@�_Ihx� &EE�6<-B-� 场曲率 �Tca�uC�L� uLe+1`Y5Ux 下图在显示了子午面和弧矢面的场曲。
bxrByu~|�1 从结果上看,沿z轴测量场曲率,弧矢场曲要小于子午场曲。
,y:q]�PR�� 弧矢和子午面焦点的z偏离的多图视图
K*7�*`�6iU ]9R?2��{"K 畸变 s^L\��h�r� 畸变定义为光线束在探测器面上横向位置y到参考位置的偏差Distortion=(yBundle-yRef)/yRef,
jM2�gu~��� 其中
D 6��7H56[ yRef =EFL∙tan(Θ) 对于F-Tan(θ)畸变
qW;nWfkYC� yRef =EEFL∙Θ 对于F-Theta畸变
0E�PF;�
Xx yBundle 探测器平面上光束质心或光束主光线的位置
;#~rd8�Z52 使用扫描光学系统的有效焦距EFL可以计算探测器平面的位置,这主要取决于入射角。
ZS�^EKz~�+ �P�@k
;Lg" 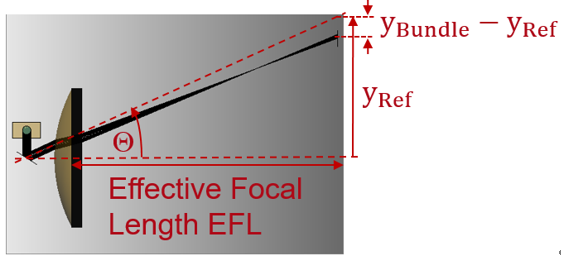 .zBSjh�_=H 1�?E\2t�&K 畸变 B �8C3LP}?
.zBSjh�_=H 1�?E\2t�&K 畸变 B �8C3LP}? 畸变是输入扫描角到偏转光束的理想探测器位置的线性测量,因此,畸变是探测器平面上光束位置像差的一个影响条件。
6&.[�:IH�w 线性依赖关系可能是tan(Θ)或者在F-Theta物镜中是Θ(LSC.0002)。
�%+o]1���R 很明显,相比于F-Tan(θ)特性,非球面透镜能够更好的校正F-Theta。这是由于相比于球面透镜,非球面透镜进行部分像差校正。
I�BE�S�$[� 'ZL)-k�b�I 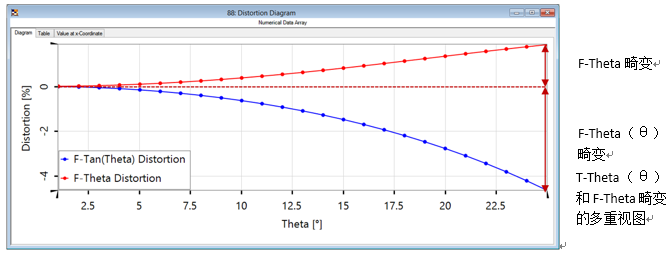 gl2�~6"dc� z#D@mn5\�a 分析轴上的光束剖面 x*Z"�~'�DI hh:0m�\�@<
gl2�~6"dc� z#D@mn5\�a 分析轴上的光束剖面 x*Z"�~'�DI hh:0m�\�@< 入射角到非球面透镜是0°。
!�6f#O�AP\ 为了更准确的评估焦点光斑,使用几何场追迹(Geometric Field Tracing )和焦区域探测器(Focal Region Detector)分析光束剖面。
0Zk�A��.p� 因此,与光线追迹的结果相比,由于场追迹可以直接评价光束剖面,包括能量分布和光束发散角。,因此产生的焦点光斑在位置和尺寸方面都不同,
&NHI��X(b6 �P/�M*XUG. 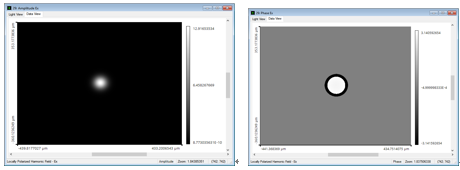 lq.����A�Q t��op3o{�4
lq.����A�Q t��op3o{�4 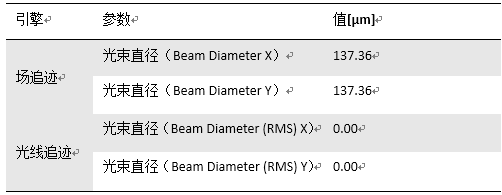 34��s:|w6y zVl�(?b&CF 分析离轴的光束剖面 xqb��I~jV# M={�k4r_�t
34��s:|w6y zVl�(?b&CF 分析离轴的光束剖面 xqb��I~jV# M={�k4r_�t 在一般情况下,与轴上场相比,离轴场中心方向上有所不同。
��]7��h&ZF 因此,如果探测器(1)正交于光轴的话,线性相位的叠加依赖于中心方向。
u'�Mq^8�� 通过倾斜探测器(2)以避免线性相位,根据场的中心方向,可由主光线的方向决定。
��`A&64��D 最后,剩余的球面相位表示离焦像差。
e-U�Pu%�' L_ 8C=�MS� 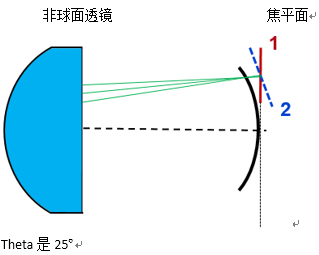 "�9>�#Q3<N o] )qv~�o)
"�9>�#Q3<N o] )qv~�o) 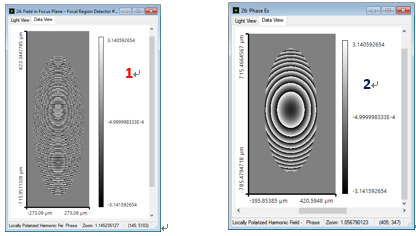 x�jR/�K&[m /SlCcozFL~
x�jR/�K&[m /SlCcozFL~ 入射角到非球面透镜是25°。
��r�IS \#j 在探测器平面将探测器进行横向偏移以及倾斜来减小采样数以分析光束剖面。
f.rHX<%q9B 通过椭圆光束剖面(下左图)和像散波前(下右图)可知,产生的光束分布受到像散的影响。
�',J3�^h!b �SJy:5e?zk 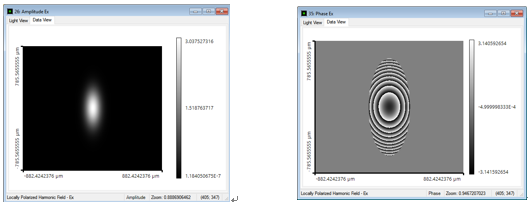 47ir QK*� ]C5JP~��#z
47ir QK*� ]C5JP~��#z 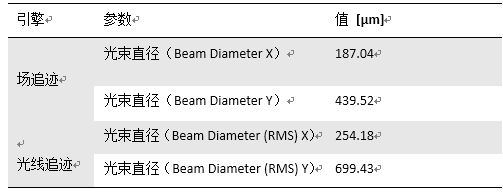 |JuXO�cr4� q S�Ct=�eQ 其他的VirtualLab特征 R:^GNr�a;�
|JuXO�cr4� q S�Ct=�eQ 其他的VirtualLab特征 R:^GNr�a;� 在此案例中,您可以从以下选择的特征中获益:
�N9�,�n/t� 探测器种类
6�`X#<#_�& 在场曲和畸变探测器(Field Curvature and Distortion Detector)中使用寻找焦点位置工具(Find Focus Position Tool)来测量焦点和光束位置(Find Focus Position Tool)
T][\wy�Lx1 在焦区域,使用焦区域探测器来计算焦区域中的场
hj0uv6t.c 参数耦合
-!w�m]kx
f 调整反射镜方位角,即到扫描透镜的期望输入扫描角度theta
�T�tkB���� 参数运行
}tc,3>��/� 生成场曲图和畸变图
ZFz>�" vt@ h2h$U�ZIv 总结 *K-,<h�J#L VirtualLab可以
4v�E,��nx= 使用双轴扫描镜和指定扫描光学透镜模拟激光扫描系统
)�1��H]a'j 在目标平面上,分析偏转光束
4s0>��QD$J 通过光线追迹计算场曲和扭曲
�O�6k[�1�C 通过几何场追迹计算光束剖面
X��$PT-~!a 场追迹可以更加准确地分析焦点光束
d~�GT� w:� Ww)q��Bsi8 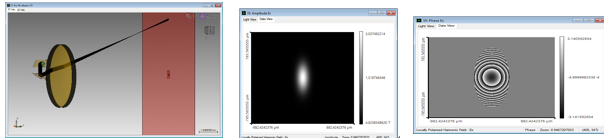 2{�@:
�:JZ - DL/�Hk_r 进一步阅读 {��_ew�c/~ e�d>_��=�i 进一步阅读:参考文献 '<4OA!,�^)
2{�@:
�:JZ - DL/�Hk_r 进一步阅读 {��_ew�c/~ e�d>_��=�i 进一步阅读:参考文献 '<4OA!,�^) [1] Von Scanlab7 - Eigenes Werk, CC BY-SA 3.0, Werk,CC-BY-SA3.0,
https://commons.wikimedia.org/w/index.php?curid=16724483 BD,�~M*%z� 4.C�LTy3�W 进一步阅读 k{"~G#Gw�P 以下文档给出了一个详细的描述,如何在VirtualLab中设置和
优化激光系统:
ad��
�i�5h 入门视频:
;) (qRZ�d6 - 介绍光路图
_;X# &S(q- - 介绍参数运行
B>AIe�c\jG 使用案例:
p5G O��@^i - 元件的定位和取向
t-_N|iW' 5 - 光线追迹引擎的设置和结果演示
M*aE)�D '� - 使用参数运行文档
kwZC�3p\\ - 一维数值数据阵列多重图像模式
<� ~x�5�{p - 大孔径透镜系统-通过几何场追迹+进行分析



