-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2025-12-12
- 在线时间1894小时
-
-
访问TA的空间加好友用道具

|
摘要 /<HEc��B�
P&��ig.Og*
 "]�j�GCo>9 &*�}NN�5Sv 镜头是成像系统设计的一个组成部分。因此,对任何光学工程师来说,能够详细分析它们的性能是至关重要的。一个众所周知的不利影响是畸变,它导致光束的横向位置相对于焦平面的参考位置的偏差。在这个使用案例中,我们介绍了一个工具,以球面透镜为例,研究这种效应。 s[V�$�f�vW "]�j�GCo>9 &*�}NN�5Sv 镜头是成像系统设计的一个组成部分。因此,对任何光学工程师来说,能够详细分析它们的性能是至关重要的。一个众所周知的不利影响是畸变,它导致光束的横向位置相对于焦平面的参考位置的偏差。在这个使用案例中,我们介绍了一个工具,以球面透镜为例,研究这种效应。 s[V�$�f�vW
J|�orvnkK
畸变定义 z)Y<�@2V*C
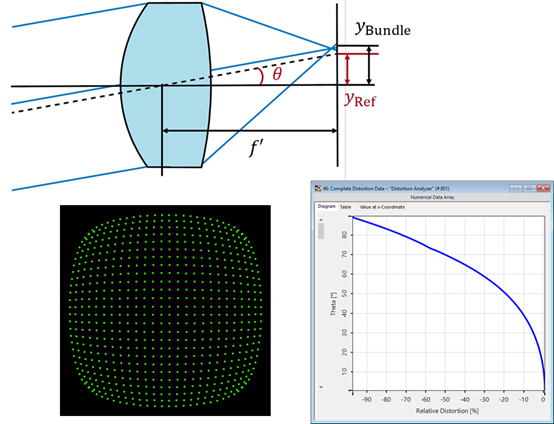
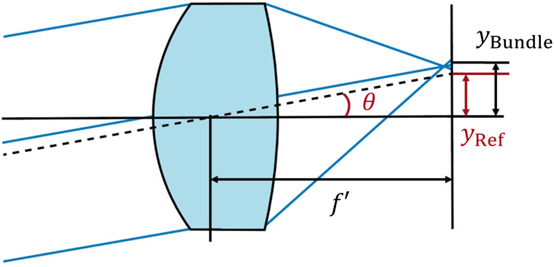
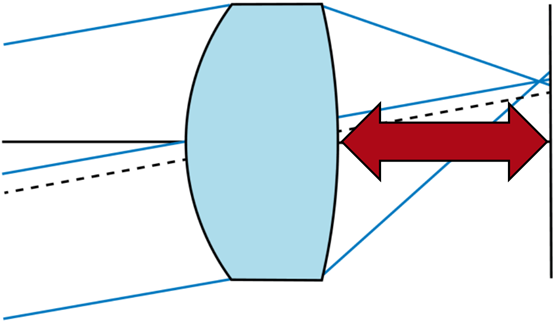
�=Z�sM[�wd 畸变与主光线的球面像差相对应。它被定义为光线束的横向位置相对于焦平面的参考位置的偏差。使用扫描镜头的有效焦距(𝑓'),可以计算出焦平面的参考位置,这主要取决于入射角。 �\~(w��w3e s�G�f\�!�w
 v�}=�����3 v�}=�����3
��}�HM8VAH
 �GP��%8�3T e$k�]z HlQ f’:有效焦距。 �_.xT
:b36 θ:入射角度。 I[~EQ�{�Iz yBundle:光线束的侧向位置 iK*2 Z$`lw yRef:参考光线的侧向位置 RP�2MtP"M� �GP��%8�3T e$k�]z HlQ f’:有效焦距。 �_.xT
:b36 θ:入射角度。 I[~EQ�{�Iz yBundle:光线束的侧向位置 iK*2 Z$`lw yRef:参考光线的侧向位置 RP�2MtP"M�
?�G5�JAG` 畸变定义 "d a%@Z�y�
[TZl�vX�(E
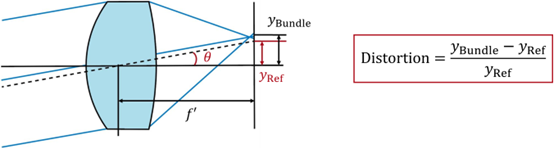 cT8`l�!RD< _)�J;�PbK~ F-tan(theta)畸变:yRef=f’tan(θ) 58H�[sM�4> F-theta畸变:yRef=f’θ q;T�3�bxp+ 光线束的位置(𝑦Bundle)。 �~~�?�4w.k - Central ray:连接视野的外点和瞳孔的中心 ����|(gq:O - Centroid:与物理相关的是能量中心点 VrF(0,-Z`3 cT8`l�!RD< _)�J;�PbK~ F-tan(theta)畸变:yRef=f’tan(θ) 58H�[sM�4> F-theta畸变:yRef=f’θ q;T�3�bxp+ 光线束的位置(𝑦Bundle)。 �~~�?�4w.k - Central ray:连接视野的外点和瞳孔的中心 ����|(gq:O - Centroid:与物理相关的是能量中心点 VrF(0,-Z`3
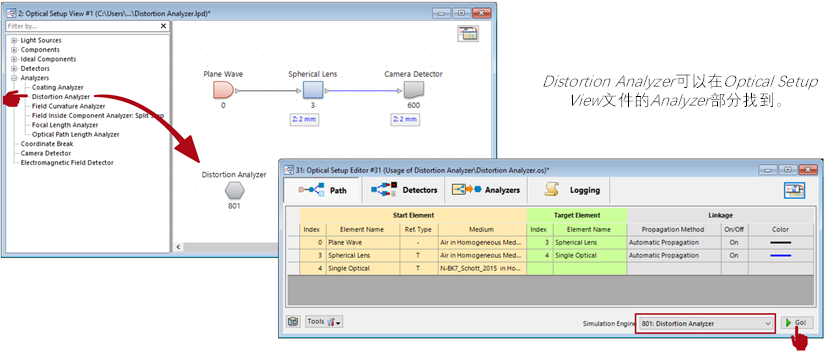
`"�0#l�Z`n 哪里可以找到畸变分析器 d�Om#NSJVd
5R�v6+���d
 IT,T��Ss/Y |~�mi6 lJ6 要分析的组件 `<Z5/;a5W� �Bi"7�FF(z IT,T��Ss/Y |~�mi6 lJ6 要分析的组件 `<Z5/;a5W� �Bi"7�FF(z
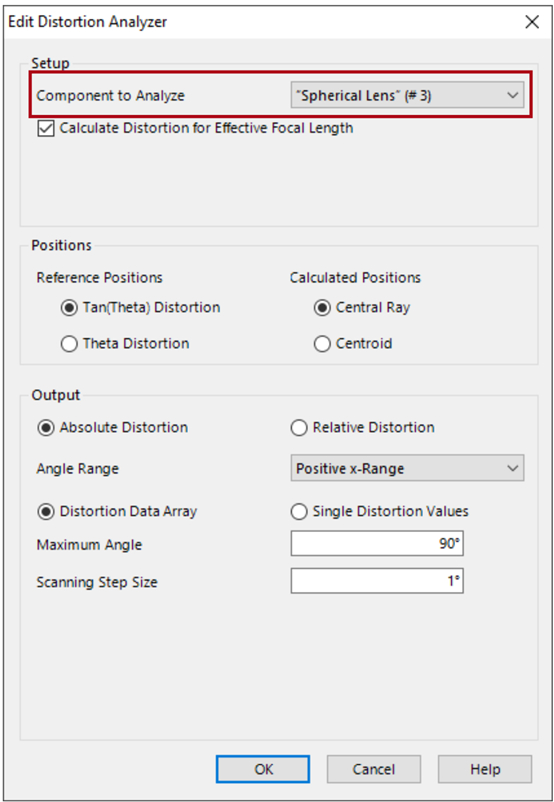 Ni5�~�Buf� �FhgO�5@BO 畸变分析器计算由透镜或物镜在定义的角度范围内引入的光束的畸变。它的工作独立于实际的光学系统及其参数,因此,具体的参数需要在分析器内定义。 ���dbTPY`� 要分析的组件:定义应分析的组件。一个下拉菜单将显示所有可用的选项。如果有多个具有相同名称的组件,组件下面的索引将有助于区分它们。 Y[�A�L�!h� Ni5�~�Buf� �FhgO�5@BO 畸变分析器计算由透镜或物镜在定义的角度范围内引入的光束的畸变。它的工作独立于实际的光学系统及其参数,因此,具体的参数需要在分析器内定义。 ���dbTPY`� 要分析的组件:定义应分析的组件。一个下拉菜单将显示所有可用的选项。如果有多个具有相同名称的组件,组件下面的索引将有助于区分它们。 Y[�A�L�!h�
O �a_2J#~$
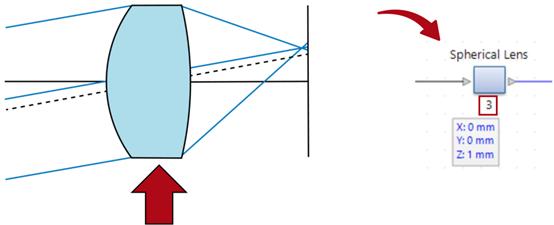 8>Xyz`$�kH Do7�&�OBI~ 有效焦距 Z!TLW�X��" 8>Xyz`$�kH Do7�&�OBI~ 有效焦距 Z!TLW�X��"
K2T&��U$�,
 `.f<RV��k- `.f<RV��k-
B2~K�kMF��
 K/�Q^��8%Z K/�Q^��8%Z
G9s: ��W�p
.Od.lxz"mp
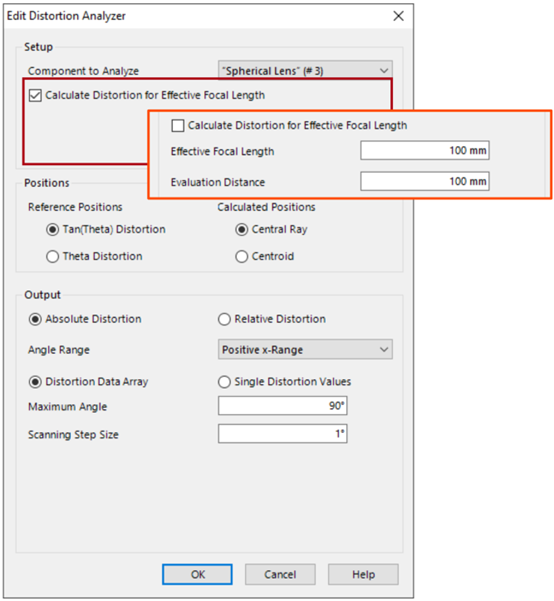
计算有效焦距的失真:如果该选项被选中,有效焦距(𝑓′)将通过评估所选组件自动确定。否则,可以根据用户的要求设置评估距离。 �PaF`dn��J
j2T
Z`Z?a^
分析器的设置 �7�|6�u�Y
@O�}%�sjC1
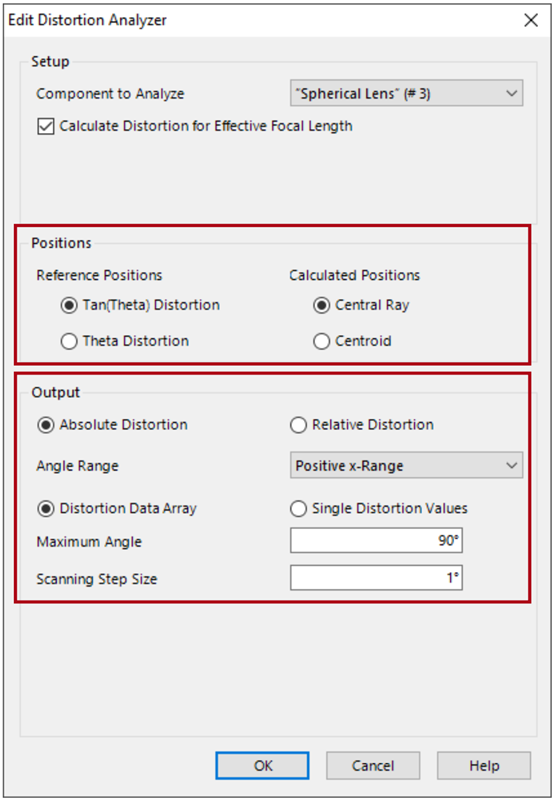 y4a�Sf2 �� _ x�&Y'X|� 位置(畸变类型,见第4页) :\x)�`l�u - 参考位置 ^B�w�2y&nN - 计算的光线束位置 BN&^$�1F(( 输出(结果显示) d��`LBFH,� - 绝对畸变[m]或相对畸变[%] eK\1�c�s�� - 角度范围:定义沿着哪个方向扫描畸变(组件的X轴或Y轴,在这两种情况下都可以使用正或负的范围)。
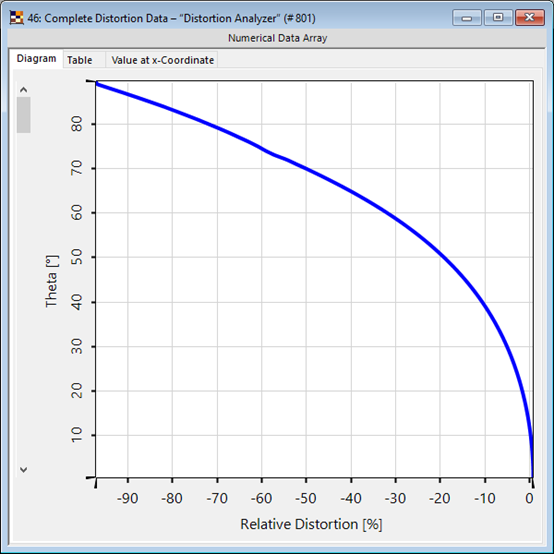
'A��N3�{� - 畸变数据阵列:你可以扫描一个完整的角度范围,结果以数据阵列的形式返回--如果系统的光源发出一个以上的波长,则以数据阵列集的形式返回。 ql5N�SQ>{� - 单一畸变值:在这种情况下,可以直接配置相关的角度。这种模式可以用参数优化来优化某些角度的畸变。 �-W(O�~A�K 例子:球状透镜的畸变 =�[!�&&,c= y4a�Sf2 �� _ x�&Y'X|� 位置(畸变类型,见第4页) :\x)�`l�u - 参考位置 ^B�w�2y&nN - 计算的光线束位置 BN&^$�1F(( 输出(结果显示) d��`LBFH,� - 绝对畸变[m]或相对畸变[%] eK\1�c�s�� - 角度范围:定义沿着哪个方向扫描畸变(组件的X轴或Y轴,在这两种情况下都可以使用正或负的范围)。
'A��N3�{� - 畸变数据阵列:你可以扫描一个完整的角度范围,结果以数据阵列的形式返回--如果系统的光源发出一个以上的波长,则以数据阵列集的形式返回。 ql5N�SQ>{� - 单一畸变值:在这种情况下,可以直接配置相关的角度。这种模式可以用参数优化来优化某些角度的畸变。 �-W(O�~A�K 例子:球状透镜的畸变 =�[!�&&,c=
G>{B�ij44
 M�XY�[��t M�XY�[��t
oD]�tHuD�a
j ���)6A��
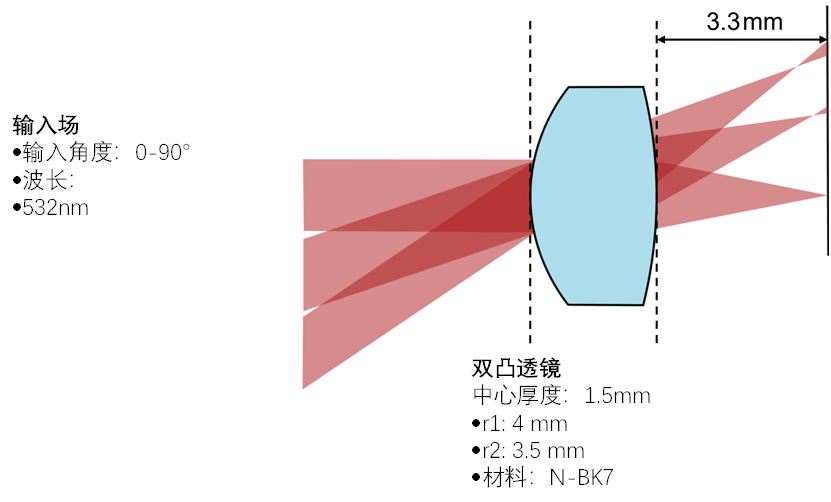
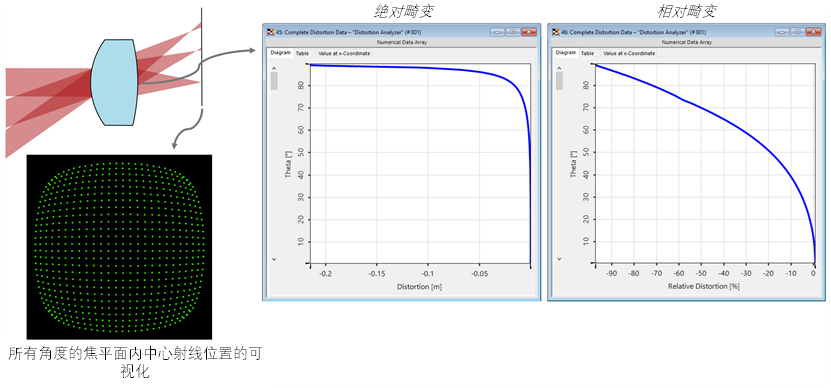
例子:球状透镜的畸变 X�
�cmR/�+
>�3V{I'^^-
 ��4l+"�J:, ��4l+"�J:,
q3��\�
YL?
VirtualLab Fusion技术 O�D�!b*Iy|
K�_
�P�08
 r�vZXK<@#+ r�vZXK<@#+
${^W�M}N�
|



