

VirtualLab Fusion 2023新版本更新内容(一) VirtualLab Fusion 2023新版本更新内容(一) 2023.1版本新特性一览 基本信息   VirtualLab Fusion 2023.1新版本 主要更新方向  VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: - 更快的速度 - 更容易使用 - 融合更多物理光学模型 - 更高的透明度 - 多元的仿真控制选择 *我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 更快的速度 VirtualLab Fusion 2023.1速度更快 VirtualLab Fusion 实现快速物理光学*通过两项关键技术进行系统建模: - 连接每个光学组件的专业建模技术 - 尽可能应用逐点建模技术 两种技术的算法在VLF 2023.1 中得到进一步优化,并提供更快的模拟速度 VLF 2023.1 更好地利用多核处理器进行并行计算。 新的配置文件编辑器(Profile Editor)和配置文件编辑工具可以很好地平衡准确性与速度 新的通用探测器(Universal Detectors)显着节省通过评估来自电磁场的多个探测器信号来建模步骤和时间 更易使用 如何更方便地使用 VirtualLab Fusion 2023.1 直到最近,VirtualLab Fusion 还仅仅只是提供了一个基本帮助功能的小按钮 在 VLF 2023.1 中,引入了全面的帮助和助手概念,并逐渐增加了内容 在 VLF 2023.1特定窗口位置里增加新的 VLF 助手(VLF Assistant)概述了软件功能特性 VLF 2023.1 带有新的模拟配置文件编辑器(Profile Editor)和配置文件编辑工具(Profile Editing Tools) 这些工具有助于顺利开始 VLF 2023.1 物理光学建模 VLF 2023.1 中的数据视图进一步统一并增加了其他功能,使它们更易于使用 VLF 计算器(Calculators)是非常有用的工具; VLF 2023.1 提供了更多这样的助手 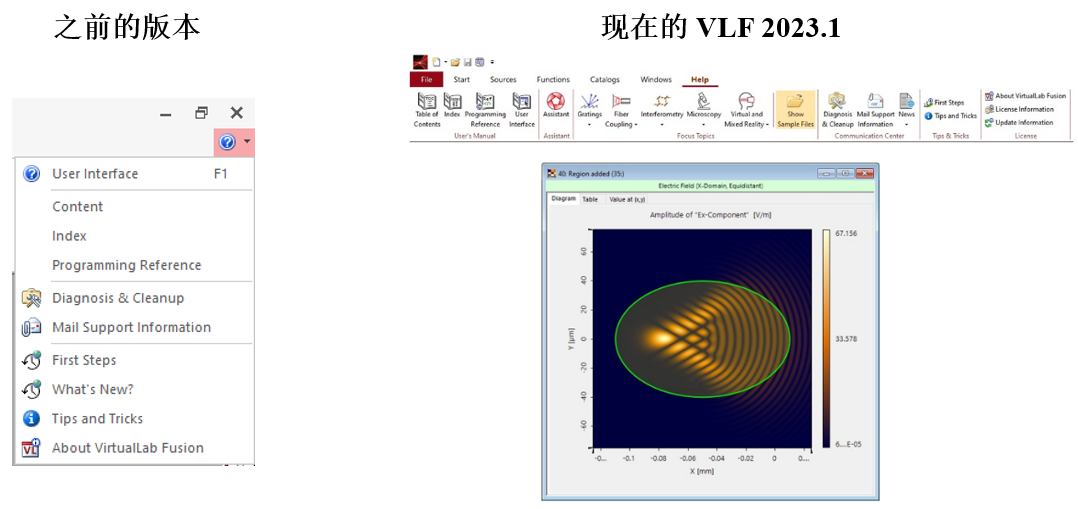 融合更多物理光学模型 VirtualLab Fusion 2023.1 中的更多物理特性 VirtualLab Fusion 提供越来越多的物理光学模型,重点是: - 具有光辐射模型的光源 - 具有光交互模型的组件 - 带有光评估模型的探测器 - 光从光源到组件再到探测器的传播模型 VLF 2023.1 为光源模型引入了光源功率管理(power management) 组件具有各种新功能 新的通用探测器意味着VLF探测器建模的巨大飞跃。在VLF中缺少探测器?已经不再缺少! VirtualLab Fusion 以其对物理光学建模中包含的衍射的无缝衔接而闻名。借助 VLF 2023.1,我们可以做得更好! 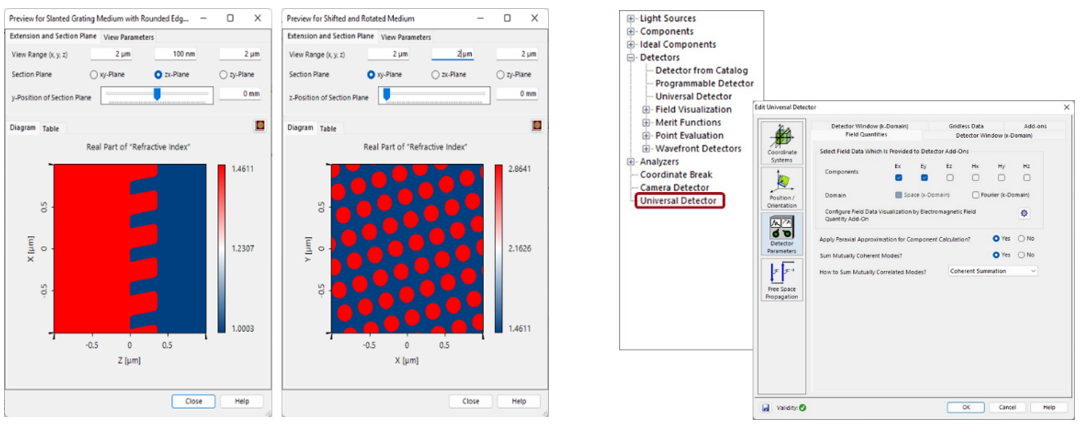 更高的透明度 VirtualLab Fusion 2023.1更高的透明度 VLF 助手提供对概念、功能、使用、一些典型故障排除和进一步开发计划的深入了解 。由此,它加深了 VLF 技术的透明度 新的模拟配置文件编辑器和配置文件编辑工具有助于获得对系统和建模参数的完整和透明的概览 VLF 2023.1 中的过程日志记录(Process Logging)提供了有关算法性能、数据采样、过程参数和每个建模步骤的 CPU时间的更多详细信息。 日志记录带来了极大的透明度,这对您的使用有益 系统模拟分析器(SystemModeling Analyzer)的新特性增强了它的功能并更好地洞察了建模步骤的影响 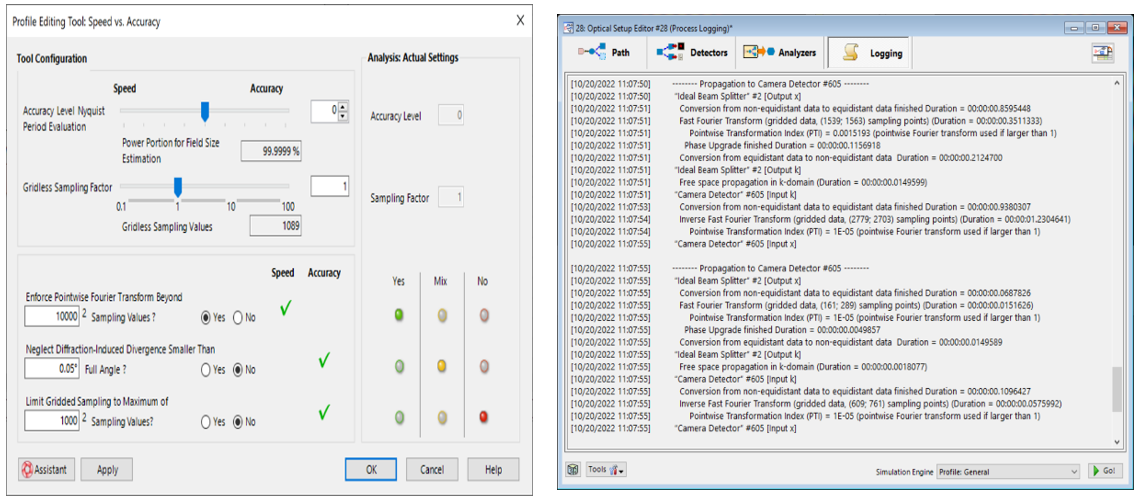 多元的仿真控制选择 VirtualLab Fusion 2023.1多元的仿真控制选择 新的配置文件编辑器提供了对所有系统和建模参数的全面洞察和完全控制。 它充当您的建模和设计控制中心 编辑器提供对所有相关参数的结构良好的访问,并具有用于快速编辑的智能功能 为了进一步简化配置文件编辑器的工作,VLF2023.1 引入了配置文件编辑工具,可以在配置文件编辑器中自动配置建模参数。 VLF 2023.1 的新专家模式(Expert)支持更广泛的数据对象数值操作。 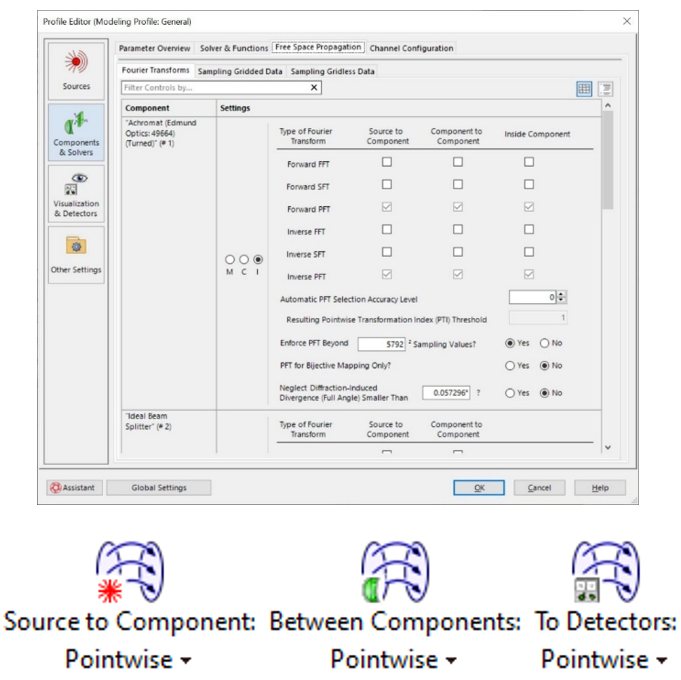 功能概述(以下为更新内容的详细解释和案例展示): 更快的模拟速度 VLF 2023.1 中更快的模拟速度 VLF 2023.1 中的模拟算法得到进一步优化并提供更快的模拟速度 VLF 2023.1 更好地利用多核处理器进行并行计算 在五个示例中,展示了计算速度的提升,计算速度提高了1.5倍到3倍 根据具体任务,速度的提升可能更多   示例 1:微透镜阵列的仿真  示例 2:晶圆检测系统 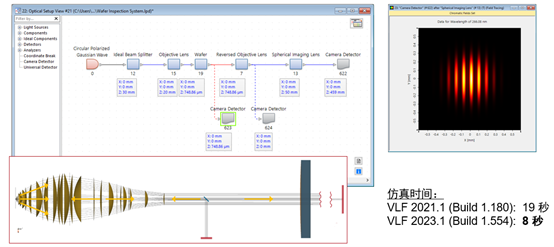 示例 3:相干性测量 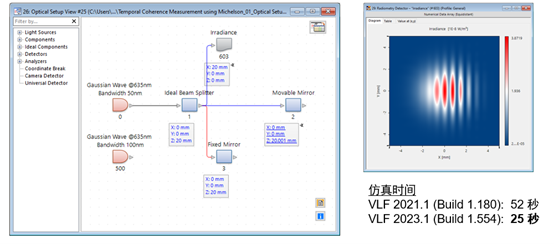 示例 4:光栅展宽器 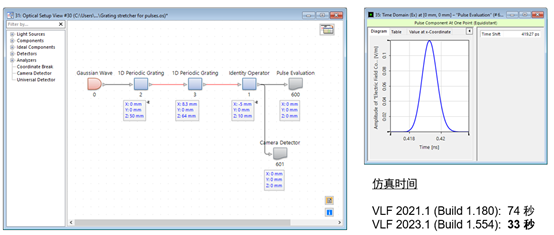 示例 5:准直系统分析 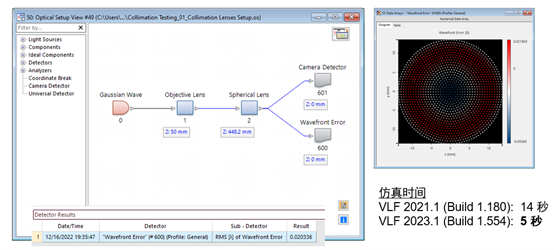 VLF 2023.1 中更快的模拟速度 新的通用探测器允许计算来自电磁场的任何探测器信号 场在探测器平面中计算一次,所有探测器信号都从相同的电磁场数据中获得 这通过避免场数据的多次计算显着提高了模拟速度 图:在示例中,Poynting 矢量、辐射强度、发光强度、照度和辐照度是根据场数据计算的 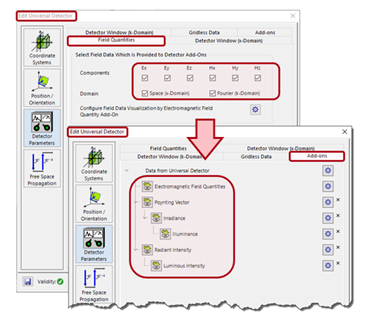 配置文件编辑器 模拟配置文件 VirtualLab Fusion 将光学系统存储在.os 文件中。 这些文件包括有关系统布局、光源、组件和探测器的所有参数 VLF 2023.1 引入了也存储在.os 文件中的模拟配置文件的概念 模拟配置文件允许配置和存储模拟设置 光学系统带有通用配置文件(General Profile),可以不受限制地编辑模拟设置 额外的光线结果配置文件(Ray Results Profile)经过预先配置,可以快速访问已知的光线光学结果 配置文件可以无缝控制在物理光学建模中包含的衍射。*   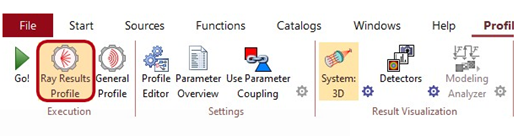 配置文件编辑器 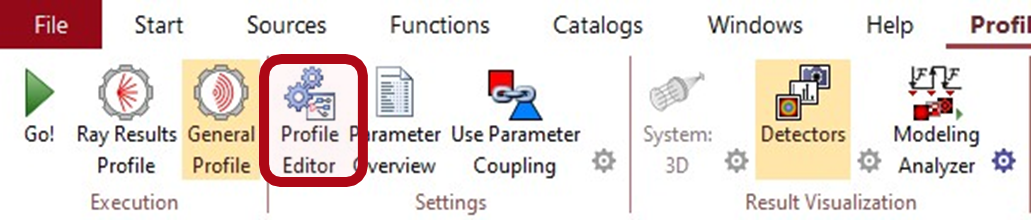 VLF 2023.1 大大改进了对光学系统及其建模(.os 文件)中所有相关参数的访问 模拟控制的中心是配置文件编辑器。 它从所有其他地方和对话中收集参数,并在一次对话中系统地呈现它们 第一个版本的配置文件编辑器与 VLF 2023.1 一起发布,结合了参数概览(parameter overview)和使用智能内部编辑工具的简单参数访问 此配置文件编辑器为系统和模拟配置提供了一个新的和额外的用户界面。没有删除其他对话框。  配置文件编辑器 配置文件编辑器的基本类别是: - 光源 - 组件和求解器 - 可视化场解和探测器 - 其它设置 光源选项卡提供对所有光源参数的访问。VLF 2023.1 仍然仅限于一个主要光源。但是多光源(Multiple Light Source)已经提供了一种在一个系统中处理一组光源的好方法 每个系统都需要一些基本设置,这些设置可以在其它设置中(Other Settings.)进行设置 日志记录提供对建模及其性能的深入洞察。 在初始化系统时,我们建议使用正常/详细日志记录。对于模拟系列和优化,应关闭日志记录以节省对 CPU 时间的贡献,尽管很小 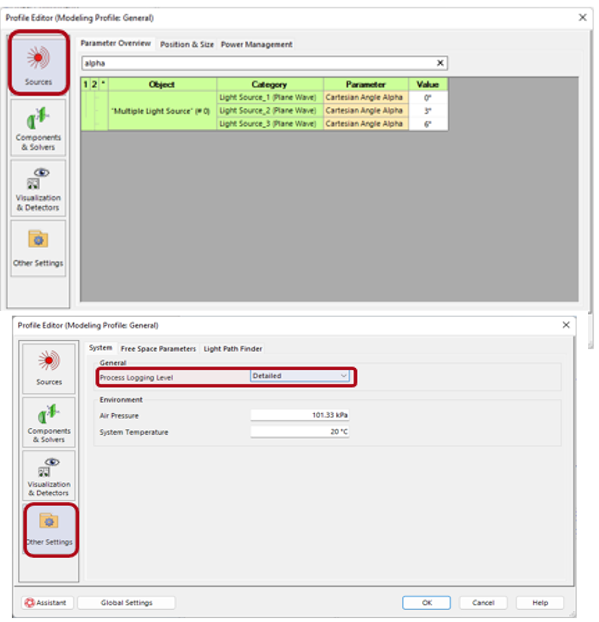 配置文件编辑器---组件和求解器 组件和求解器选项卡可以访问类别 - 参数概览 - 求解器和函数 - 自由空间传输 - 通道配置 参数概览提供每个组件的系统参数概览的摘录 求解器和函数选项卡将允许访问每个组件的所有相关参数。 然而,在 VLF 2023.1 附带的第一个编辑器版本中,大多数这些参数尚未从组件对话框中收集 通道配置选项卡可以轻松配置每个组件的非序列模型。 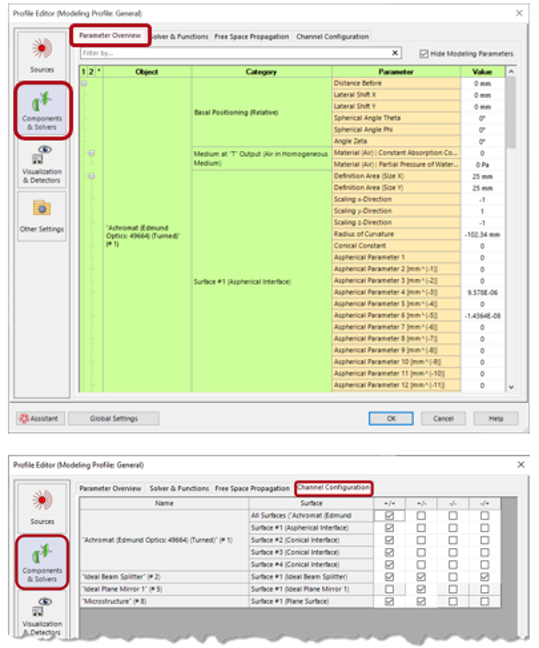 配置文件编辑器---自由空间传播 从光源到组件和探测器以及组件之间的传播构成了连接光源与组件求解器和探测器的关键技术* 它由组件的自由空间传播选项卡和探测器的传播到探测器选项卡控制 配置文件编辑器支持对建模中的傅里叶变换进行详细设置,并由此无缝控制物理光学建模中包含的衍射* VLF 2023.1 提供各种工具来帮助进行这些设置以及技术背景信息,以便轻松掌握这一关键技术 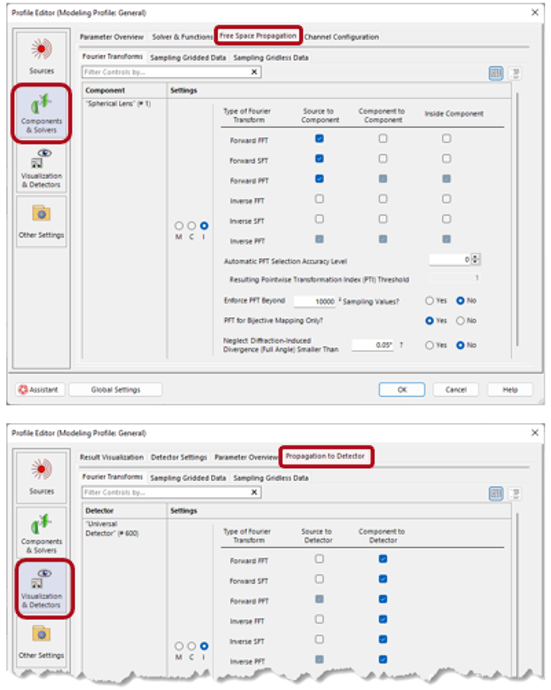 配置文件编辑器---探测器和可视化场解 结果可以通过以下方式可视化: - 系统 3D 视图 - 来自探测器的数据视图 - 来自模拟分析器的数据视图 由于3D系统中的光传播由光线形式存在。VLF 2023.1 仅在光线结果配置文件中提供 3D 系统可视化选择 可以在两种配置文件中生成探测器输出。在光线结果配置中,它们仅限于点图、方向图和波前相位/OPL 的可视化 通用配置还支持选择模拟分析器 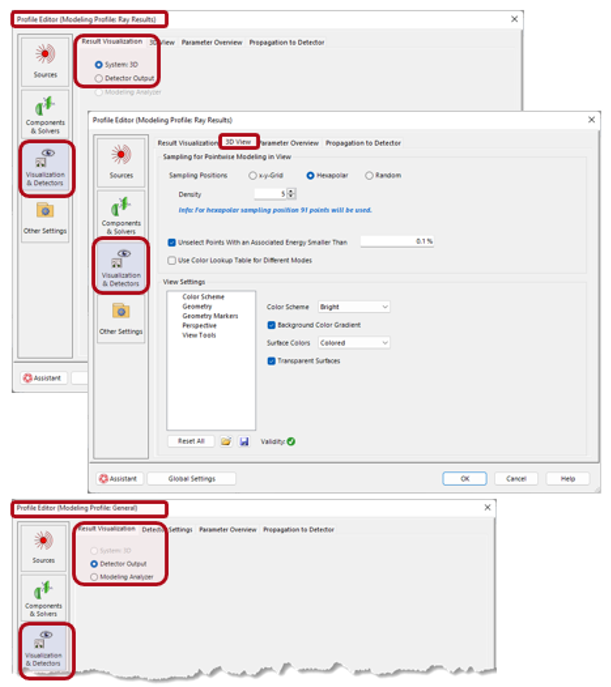 配置文件编辑器---探测器和可视化场解 第一个版本的配置文件编辑器提供了新的通用探测器的所有参数 参数包括“传播到探测器”设置以及通过无缝控制在传播到探测器中包含的衍射效应 探测器设置允许选择要在x 域和k 域中评估的场量,以及关于探测器窗口中的尺寸和采样的设置 如果传播到探测器的建模的最后一步是逐点的,则场值以非均匀网格的形式到达探测器。 VLF 2023.1 只允许显示带有场值或位置的点云。 它提供了点图的直接获取 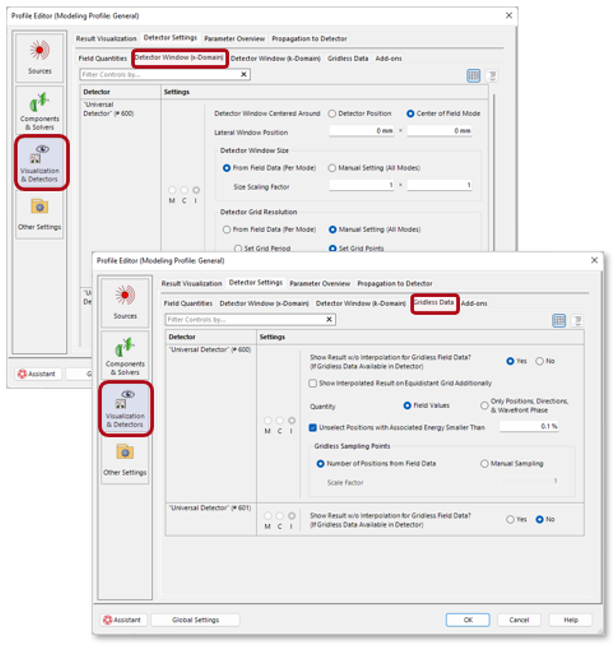 欢迎大家扫码加微,了解详情 
分享到:
|
