e1B���qd+� VirtualLab Fusion包括一系列建模方法便于用户可以地调整
光学仿真的精度级别和时间。不仅如此,这种功能还有助于隔离物理原因产生的不同影响。在本示例中,我们提出了一个清晰的工作流程配置一个仿真,以便在物理光学
模拟中考虑或忽略
衍射效应。
� .F/��0:) -���I�.B�Q  W
#V��`|JA cg�_j.=M-� 2. 建模任务 $<�F�9��;Z �&��R�t^�G
W
#V��`|JA cg�_j.=M-� 2. 建模任务 $<�F�9��;Z �&��R�t^�G 如何在FieldTracing 2nd Generation 引擎中控制衍射的包含。
?v}��S9��z �2}�U:6w� 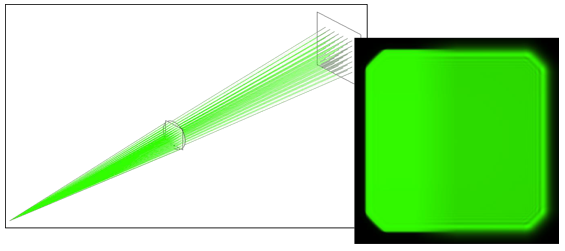 8o���m)A0S 3. 概览 ��Uq�NUP+K ; ~�#�uH7k
8o���m)A0S 3. 概览 ��Uq�NUP+K ; ~�#�uH7k 在一个由球面波、
孔径和
相机探测器组成的试样
系统上显示了如何控制包含衍射的工作流程。
OEhDRU��%k 首先,利用
光线追迹引擎对系统进行不包含衍射的分析;
v?s%qb=��T 然后,使用场追迹引擎对系统进行分析,其中包含的衍射通常是自动包含的,但是可以通过不同的用户设置来控制。
>N-l2?r��E �x/�uC)xm� 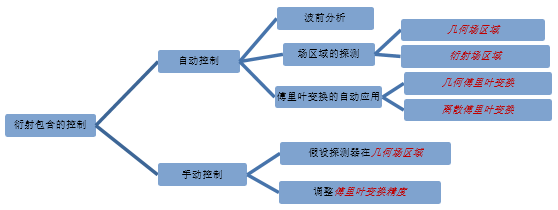 �/�kNS��B; 4. 光线追迹系统分析 `Tc"a_p9�t t�G*HUN?*� DT3koci��(
�/�kNS��B; 4. 光线追迹系统分析 `Tc"a_p9�t t�G*HUN?*� DT3koci��( 光线追迹系统分析器
#D
.h��Z=! - 通常开始使用光线追迹系统分析器(Ray
U�g8�>|wCE - Tracing System Analyzer)分析您的系统。
Cp�^`-=�r+ M s�Q�=1 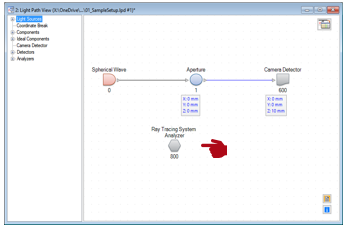 >�(C�5�&3^ A@)ou0[�n@
>�(C�5�&3^ A@)ou0[�n@ 用于演示工作流程的
原理设置包括
Y�Sux#�*#H - 球面波,默认设置,但距离输入平面(Distance to Input Plane)10毫米;
w�G
X\ub#! - 矩形孔径,矩形孔径(Rectangular Aperture)为1mm×1mm;
ub]"�b[j\1 - 相机探测器默认设置。
!+_X q$�9_ lD6PKZ\RIj 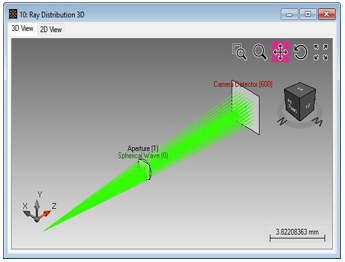 %:yV�jb,Yf ��gb}>x��O
%:yV�jb,Yf ��gb}>x��O 光线追迹引擎
l��N'�b"N� - 接下来,应该使用光线追迹引擎检查探测器的输出,而不包含任何衍射效应。
pReSv�F}}C j�O}<W�1qy 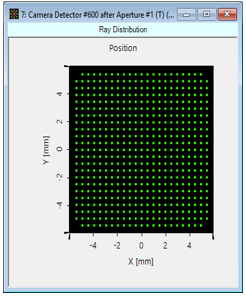 _bSn� Y�hS ��R��SB�k^ 5. 场追迹系统分析 <uvA([r=Vq n.�.R'v�Nj �7.bP�Pr&
_bSn� Y�hS ��R��SB�k^ 5. 场追迹系统分析 <uvA([r=Vq n.�.R'v�Nj �7.bP�Pr& 第2代场追迹
QSyPt�jg�] - 现在,该系统可以在不包含衍射的情况下通过场追迹进行分析。
<`d;>r=�4z - 这必须在检测器设置中通过激活复选框来设置,假设检测器评估的几何场区域。-因此,探测器上的强度图没有显示出任何衍射效应。
�ZG8Xr�"
 sZI$t L<�j V11��XI<V� rT';7>{g
sZI$t L<�j V11��XI<V� rT';7>{g 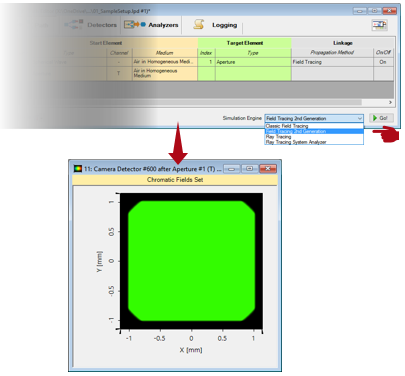 O6���n��]l 8y'�.H21:;
O6���n��]l 8y'�.H21:; 第2代场追迹
&;[��e���� - 现在,该系统可以在包含衍射的情况下通过场追迹进行分析。
zR5K��C!xc - 这必须在检测器设置中通过不激活复选框来设置,假设检测器评估的几何场区域。
.x][� _I�> - 在VirtualLab中,所需包含的衍射是由引擎自动决定的。
�q�z8Jvgu? - 因此,探测器上的强度图显示出衍射效应。
Ao$|`Lgj=z ��L�c�_cB` 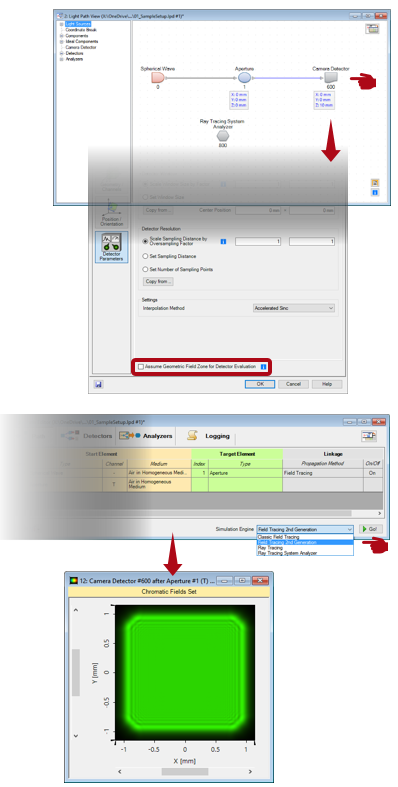 �1"~$(@oxG W�d?=�RO`a
�1"~$(@oxG W�d?=�RO`a 第2代场追迹
N `[ ?db-% - 在这个示例中,可以通过减小球面波到孔径的距离来减小衍射的影响。
+�lZvj=gW - 因此,到球面波输入平面的距离减小到3mm。
Aaz2._:/-m - 在某一点上,场跟踪引擎切换到强度模式的纯几何评估,而不考虑衍射。
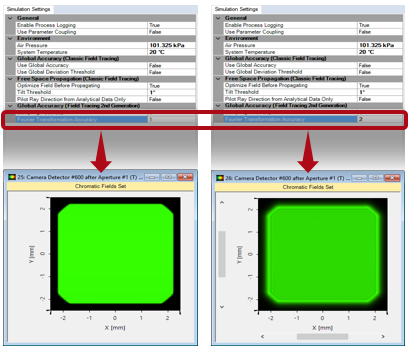
�Z4�36���9 - 在第2代场追迹引擎的仿真设置中,通过提高傅里叶变换的精度,可以再次增加衍射的包含。
�MY l9 &8� 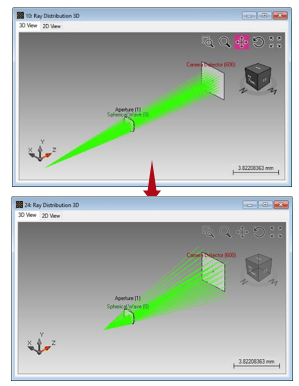 �A�tNF&=Op
�A�tNF&=Op 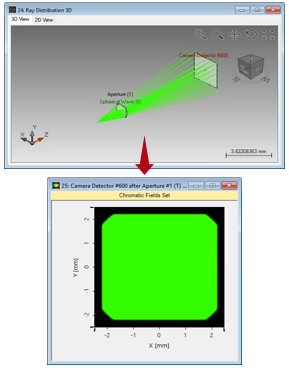 /om�m���M�
/om�m���M�