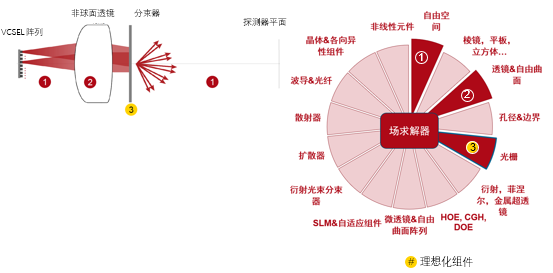
,Gy2$mg�lB 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
83_vo0@<�6
xPz��B�be 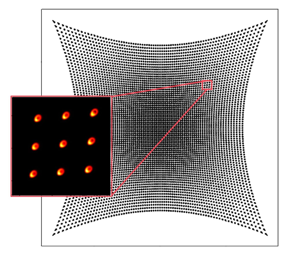 EOo,olk�lC 建模任务 x57O.�W�dN N[�k�l3h%q
EOo,olk�lC 建模任务 x57O.�W�dN N[�k�l3h%q 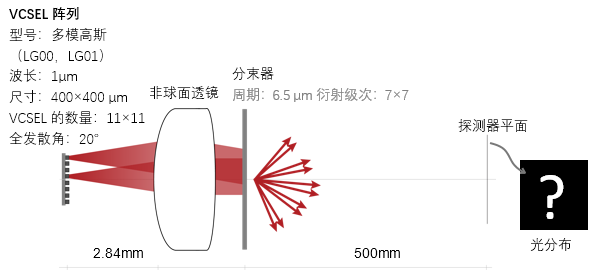 qEf��g-`*M +7r?��vo�1
qEf��g-`*M +7r?��vo�1 *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
�V�bX$\Cs: ;nK�hmcQ4� 光源建模 7towj��w�r �>9t+lr1 � 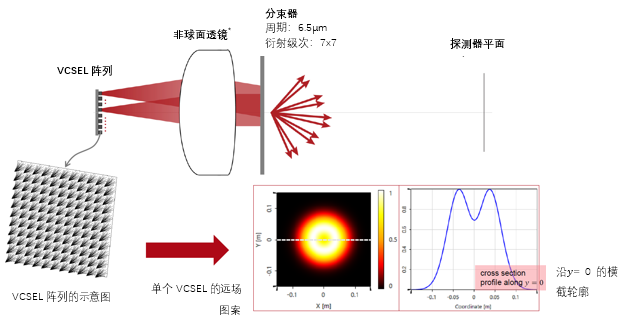 u^�( s��0q ����JN3&(t 轴上VCSEL单元的仿真 t!o=�-�k�� � yHn8t]{
u^�( s��0q ����JN3&(t 轴上VCSEL单元的仿真 t!o=�-�k�� � yHn8t]{ 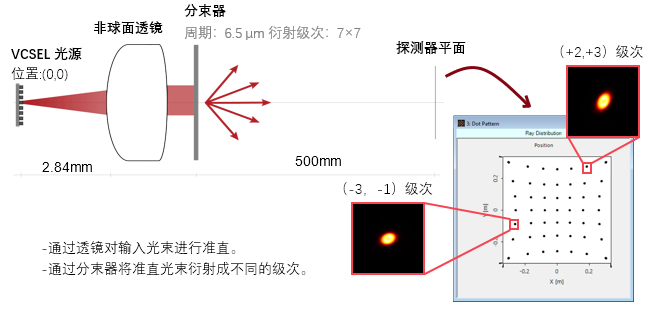 ��s,-}}6WO tkW�7�wP�; 离轴VCSEL单元的仿真 =h[��;'v{� �l��f_�q6y
��s,-}}6WO tkW�7�wP�; 离轴VCSEL单元的仿真 =h[��;'v{� �l��f_�q6y 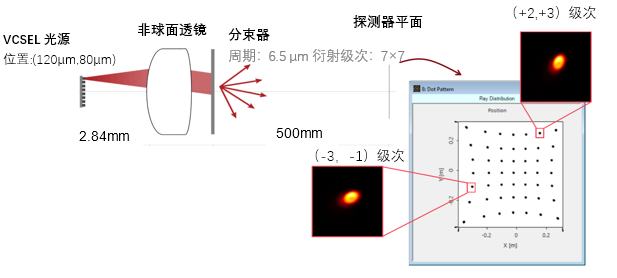 U��_�~r0 n7h�j�YNJ
U��_�~r0 n7h�j�YNJ -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
Nh1���,
w -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
�"�89L��^I (8Te{K�h�' 完整VCSEL阵列的仿真 O}X�@QG�2_ >Y;[�+#�H[ 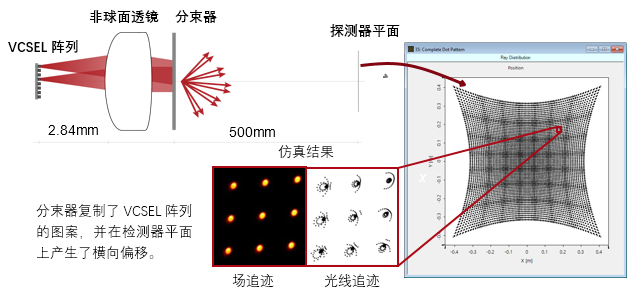 �5EL�&?\e� ft�P]WGSS> VirtualLab Fusion一瞥 o^Qy�7�1Uj i��w���I}�
�5EL�&?\e� ft�P]WGSS> VirtualLab Fusion一瞥 o^Qy�7�1Uj i��w���I}� 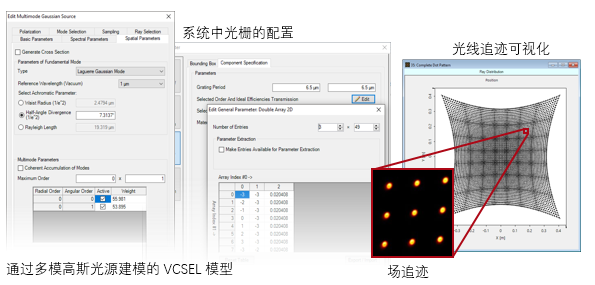 }ni@�]k#q< [uF��v_G{H VirtualLab Fusion中的工作流程 �I3�6ClOG� :.S��wO�<j
}ni@�]k#q< [uF��v_G{H VirtualLab Fusion中的工作流程 �I3�6ClOG� :.S��wO�<j •设置多模信号源
vW�jHH��w� @^�n�E^;� •设置组件的位置和方向
n\u3$nGL1` B*n_�
VB�d •在
光学系统内配置光栅组件
E+~�1GKd�� �fnK� H<� •参数运行的配置
j�){�0>O.V 9eEA�80i7 +5H1n�(6) 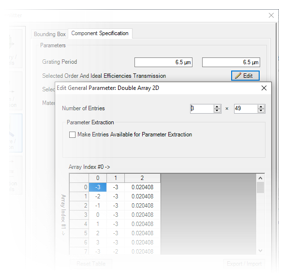 �|�v:fP;zc )zu m.6p�T VirtualLab Fusion技术 IY}{�1�[<N h&z(;B!;y.
�|�v:fP;zc )zu m.6p�T VirtualLab Fusion技术 IY}{�1�[<N h&z(;B!;y.