-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2025-02-21
- 在线时间1734小时
-
-
访问TA的空间加好友用道具

|
摘要 T.=�d��u$�
+>F #�{b 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 ��d�Z
kr#> �%?4��G^f  �a�zUEp8`| G?y'<+Aw�t 微透镜阵列的结构配置 �zeXMi�:�X �`F#<qZSR� �a�zUEp8`| G?y'<+Aw�t 微透镜阵列的结构配置 �zeXMi�:�X �`F#<qZSR� 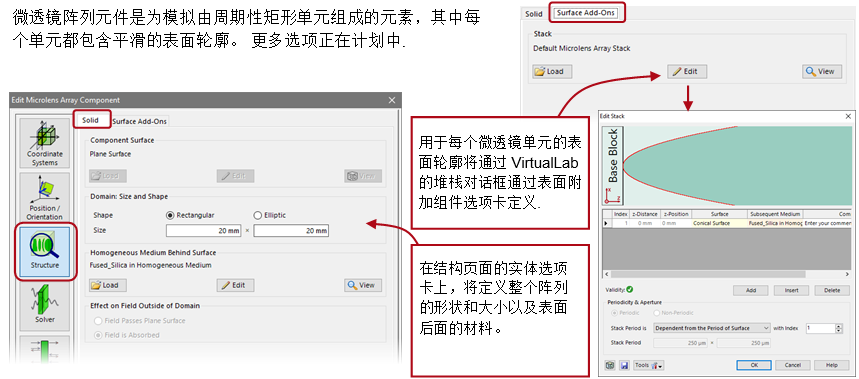 >�/k��wy2� 5�&uS7�0�0 >�/k��wy2� 5�&uS7�0�0
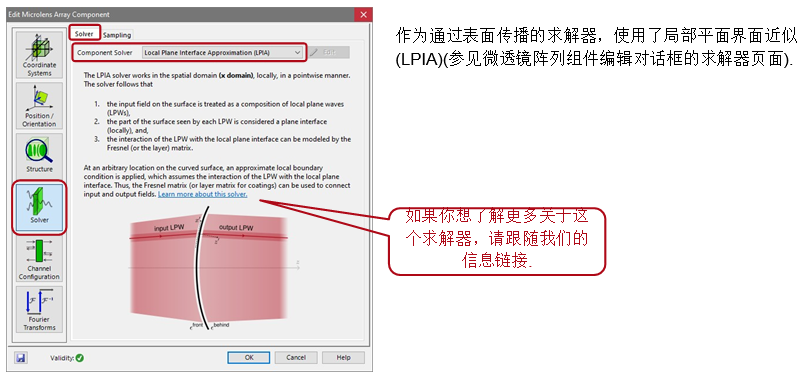
场通过哪一种方法通过MLA传播? Od>�^y�h�n ��4s�Vr]p`
 �Cw�=wU/)� �(f5v{S6b( 子通道分解 +hz^( I7� �f>�u{e~Q, • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . =uYz4IDB�� • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 "/�EE�$eU� 例如 微透镜的数量,表面变化的强度, $rZ:$d.��C • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 `f@VX
:aL} • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. Y'.�WO[dgf �Cw�=wU/)� �(f5v{S6b( 子通道分解 +hz^( I7� �f>�u{e~Q, • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . =uYz4IDB�� • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 "/�EE�$eU� 例如 微透镜的数量,表面变化的强度, $rZ:$d.��C • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 `f@VX
:aL} • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. Y'.�WO[dgf 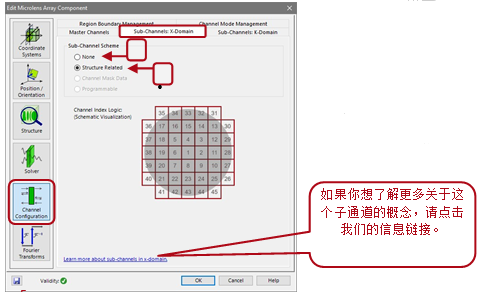 :\0�q\2e[< :\0�q\2e[<
`%2e?�"OOJ �8�\M%\]_
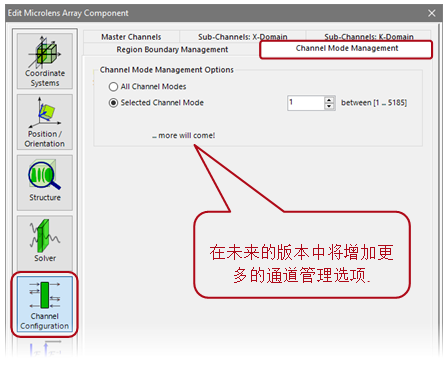
%J�rd�r�`< K�|�H&x�"t 子通道评估 $l�jgFmR_� ��U#�B,Q6~ • VirtualLab Fusion还可以分别评估每个微透镜的结果. I92��c!`�{ -�zeod�v7� • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. Z66�b>�.<8 :R�s�% (Z�
 xLE+"6��;W xLE+"6��;W
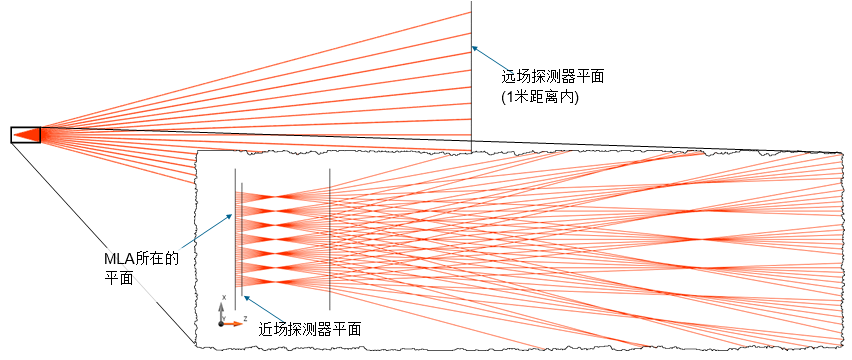
��V/0?0VKG 近场评估探测器的定位 -jZP�&8dPH �ZO�FhX$�I 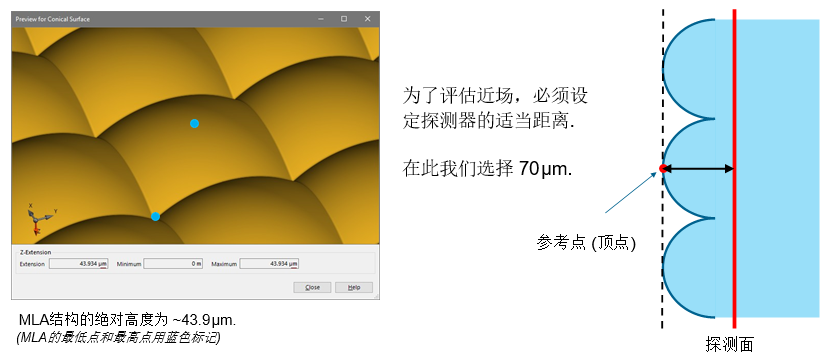 ,RkL|'�1�l b}G�4eXkuj 区域边界管理 ^J8s�R4p# ��x 5�u.D^ ,RkL|'�1�l b}G�4eXkuj 区域边界管理 ^J8s�R4p# ��x 5�u.D^ 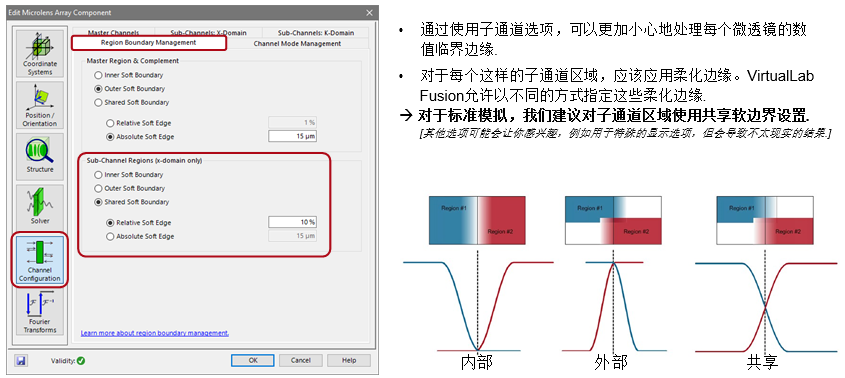 <J�A`e�+Bi Oc;�/��'d2 场景演示 XFe�eNcqF <J�A`e�+Bi Oc;�/��'d2 场景演示 XFe�eNcqF
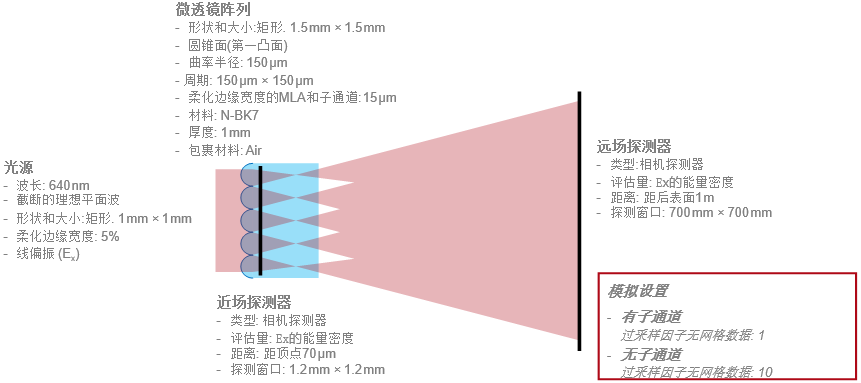
)P�^5L<q>| 演示示例的配置 W#�<&(s��4 �w"Cc�Wng1
 6�~b~[g��A 6�~b~[g��A
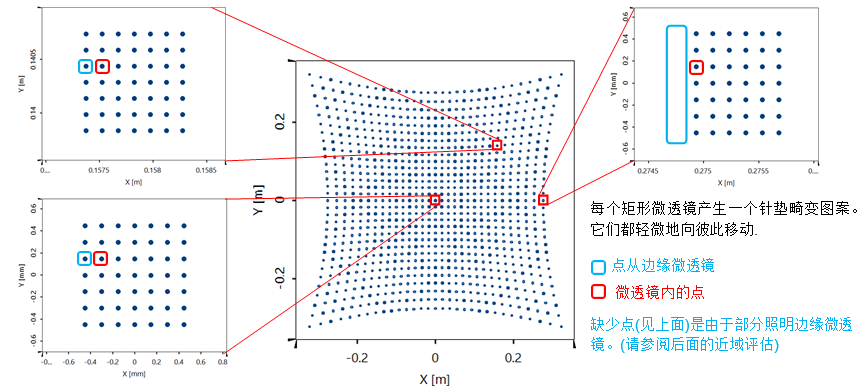
�9<An^lLK* 光线追迹结果: 综述 ��&FW��Pb# Jmb [d\ /D
 tQ7DdVdix� #5?Q{ORN o 光线追迹结果: 远场 :<%q9)aPf` wz�*QB6QtU tQ7DdVdix� #5?Q{ORN o 光线追迹结果: 远场 :<%q9)aPf` wz�*QB6QtU
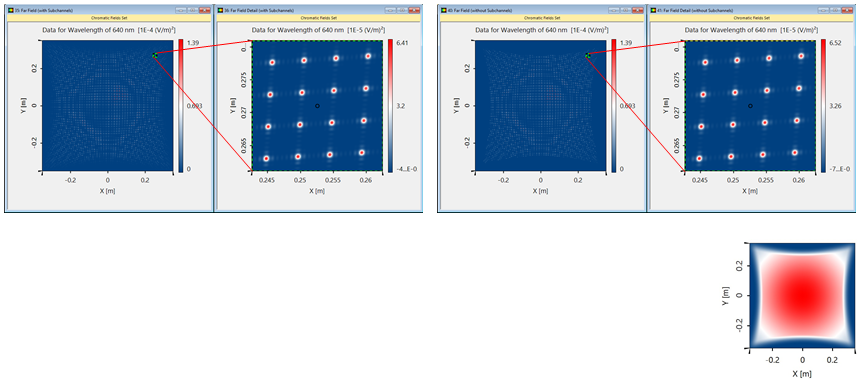
 :E|H�P#iwu \?�,'i/�c- 场追迹结果: 近场的能量密度 UarU.~�Uqi �<v?9�:}� :E|H�P#iwu \?�,'i/�c- 场追迹结果: 近场的能量密度 UarU.~�Uqi �<v?9�:}� 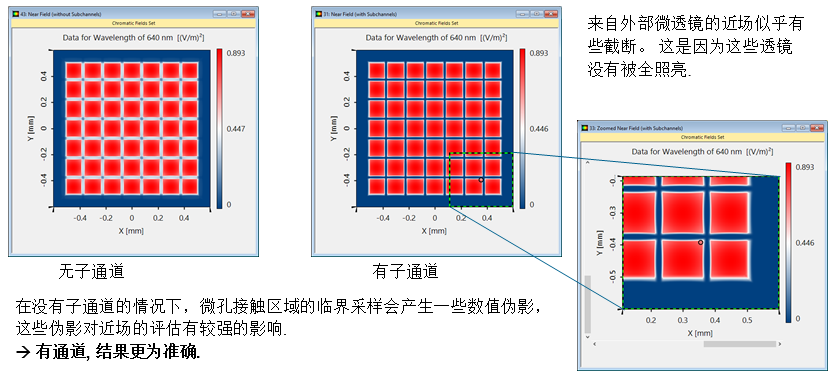 Xpzdv�R��1 bQ-5uFe~$B 场追迹结果: 远场的能量密度 5Wj+ey^�^w $�+IE`(Ckf Xpzdv�R��1 bQ-5uFe~$B 场追迹结果: 远场的能量密度 5Wj+ey^�^w $�+IE`(Ckf
 �]E���6�6' 8Ek<J+&�|I �]E���6�6' 8Ek<J+&�|I
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: �,jBd3GdlZ
w�5l:^^zF(
带有子通道的仿真时间: ~70 s 2,nK�bE�9*
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) �IM���Y�?L
V1K�Wi���^ j�.�$#10*:
dbkccO�}WB }D��T�pl?l 9&A���-��o
-O�pI,q�yS
|



