-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-03-10
- 在线时间1939小时
-
-
访问TA的空间加好友用道具

|
空间光调制器(SLM.0001 v1.1) crt
)}L8- 应用示例简述 Wm/0Y'$r&k
��
W�b/q&o 1. 系统说明 �<Yk#MeiEp 光源 *c+��Kq�z- — 高斯光束 �yqm^4)D�p 组件 2�,Og(_0�> — 反射型空间光调制器组件及后续的2f系统 %!G]��H�� 探测器 VE<&0d�<�� — 视觉感知的仿真 t@TBx�=16� — 电磁场分布 _^<H�lfOK� — 效率、SNR,一致性偏差,杂散光评估 .'q0��*Pe� 建模/设计 ]��iyJ>�fC — 基于迭代傅里叶变换算法(IFTA)设计位相传递函数,将高斯光束整形为高帽光束 Q}N.DM�@d3 — 场追迹:光在空间光调制器像素阵列的衍射。 ,[l�S��)`G (C�R�Y$+d 2. 系统图示 Q�}a 1P8?S JwNG`M�Gc� 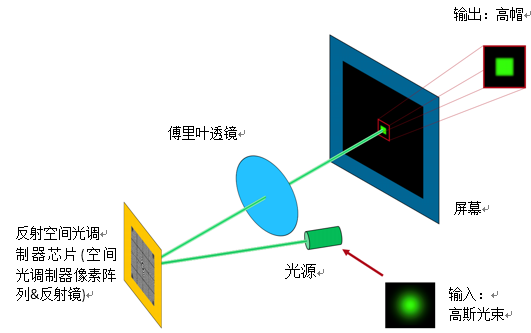 ?]'�Rz\�70 ?]'�Rz\�70
wr/Z)e =^3 VirtualLab内置的工具,如: ,iXE3TN;W� 迭代傅里叶变换算法(IFTA) Ub%a�l�
�D 一个辅助会话编辑窗口 �Qo�!/��]\ 经典场追迹仿真引擎,提供多样化选项以最合适的方法来处理衍射效应。 8�$�:4~:]/ P~V0<��$C� 我们可以: 7T]}<aK<c[ c�5�?;^�a[ 1. 为反射空间光调制器(SLM)生成一个优化后的位相调制分布设计 ��ZE@�!s3\ 2. 在最终系统的设置中对仿真结果进行分析。 +1Ha,O���k 5TqT`XTz�m 应用示例详细内容 �+)C��?v&N 系统参数 ;O*�y$|+PA
%t&�5o>�1C 1. 内容概览 p!�MO�p-;- 首先在系统详述中给出了仿真参数、常规系统以及评估结果。 e~�C^*w��L 接下来通过一步一步的描述来帮助你了解如何设置此系统。 w�z-9�+VN6 最后的部分给你必要的信息,即到处必要的设计核分析数据以用于实际的SLM模块。 NrE�&�w H: rz�H*|�B0g 2. 应用实例的内容 �N#-P}\Q9� ��PK#; \Zw ;Ocih<4�k 3. 设计&仿真任务 Vx5ioA]{� bDa(@�Q�J- f?wn�;;�z`
对于2F系统和一个给定的SLM,我们设计了所需的位相用于生成一个矩形高帽光束(超级高斯)光分布。 n&�Q�{
[E�
SLM偏折光线以在远场生成高帽形状光束,傅里叶透镜将光束聚焦,并决定了最终的工作距离。 `B{N3�Kxbp
Y%v?ROql�� =@U~�sl��[ 4. 参数:输入激光束 Np4';����H ��=,q,W$-� 文件: SLM.0001_TopHat_SLM-Design_1_InputField.ca2 w /$4
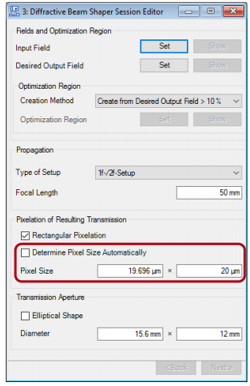
Rv+S �\$��Xo5f< 5. 参数:2f系统&期望输出光束 c�D&53FPXC 'u }|~u�?m 文件: SLM.0001_TopHat_SLM -Design_2_OutputField.ca2 F6�*n,[5( �j�T�b�J�L wu5]S)?�*� 6. 参数:设计条件 =v�-B�zF15 一般DOE vs SLM设计 �e�_Na_l]� 对于结构置于基底材料的衍射光学元件,像素尺寸在x和y方向可以自由选择。对于SLM应用, 这些尺寸都是基于SLM的像素尺寸而固定的。 C�O��e�"te 反射系统 6/ir�("L�K 在反射SLM系统中,其SLM是倾斜的,入射光仅可以“看见”倾斜的SLM像素区域。因为设计和优化算法都是假设光线垂直入射,因此,传输函数的像素尺寸必须适应设计。 �_�&TA|D�a
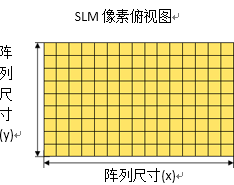
o}�&T�Fh�T 7. 参数:SLM像素阵列=传输
�N�IcPj�o {_0m0�
��8
 @^�8tk3$�Y @^�8tk3$�Y
��l�wEJ)Bv
eMk?#&�a)�
在该设计中,忽略了SLM像素间隔。 0xbx2jlkY�
如在SLM.0001中,我们假设一个区域填充因子为100%。 Fp>i�wdjFg
`mTpL��^f�
 9A��L�E6�� 9A��L�E6��
�ezRhS�N?�
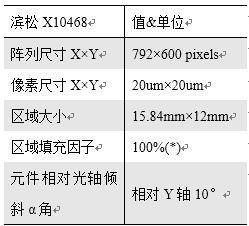
(*)实际上Hamamatsu X10468的区域填充因子为98%。其效应将如SLM.0002标题所述。 ��~|e?@3_G 8. 设计的压缩长度 V!#+�Ti/w4
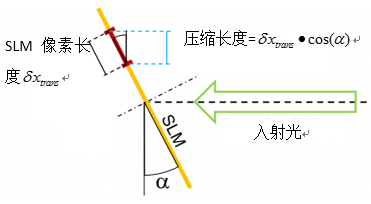
.i[rd4MC�K 由于反射系统相对于Y轴有一个倾斜角度,垂直的入射光,以压缩视图的方式看SLM的X方向的长度。 i3~"qbU%z[ �B�#Rw��W,
 �4�LqJ�4jo �4�LqJ�4jo
Tw��BwqQ)t 对于本设计—采用正入射考虑的迭代傅里叶变换算法—通过将SLM的X方向长度及其像素尺寸分别乘以因子 以顾及到倾斜角度的影响: 0 1U/�{D6D kwRXNE(k]_
 �}gQ F�WT� � �)N�`a4p 9. 辅助设计&优化 $�]�IX11.m �}gQ F�WT� � �)N�`a4p 9. 辅助设计&优化 $�]�IX11.m
K�h<xQ:eMy
_5�'OQ'P2�
VirtualLab提供了一个会话编辑器用于光束整形中协助用户配置设计和优化文件。 J;|r00�M��
其更多地用于经典衍射光学元件(DOE)的设计,因为其像素尺寸是变量,具体的大小将在设计过程中定义。 ydo�"H9NOS
对于一个SLM系统,元件的像素尺寸是一个固定参数,因此必须在会话编辑器中手动指定。 �U4]�>8��L
 KE3/s�w0� KE3/s�w0�
文件:SLM.0001_TopHat_SLM -Design_3_DesignDoc.ca2 5$�o�]��D�
}oH�A@o�5
10. 设计结果:位相传递函数 {3@�lvoD�T �4.)��hC�b 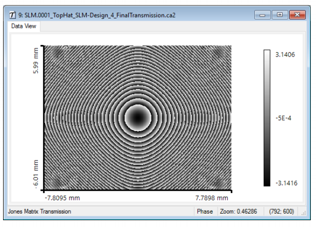 M>��hHTa?W M>��hHTa?W
相邻的位相分布结果以2π模显示。 NF`WA�-W8@ %N 8/g�]`7 文件:SLM.0001_TopHat_SLMDesign_4_DesignedTransmission.ca2 F�m(~Vt;%u
>Q&�E4�j�C 应用示例详细内容 �_"
0VM�>� �~|+�!��xh
仿真&结果 1:]iV}OFqR
�Jo�lr"F? 1. 设计结果:评价函数&输出 ���Ws�'OJ1
5�MsE �oLg 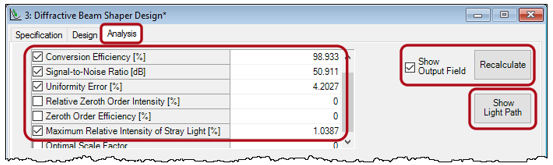 |_V��i8�Ly |_V��i8�Ly
x
;V7D5 �q 设计结果的特征参数可在分析标签页内进行计算。输出场(振幅)以伪彩色(彩虹)表示。 ]���Ig�d<� 点击显示光路图 打开系统的光路图文件(LPD)。 B0�Ql1x#x� V?U->0>Z4� 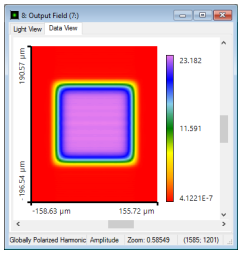 g�Jn�|G#!� g�Jn�|G#!�
U 2�k^X=yl 2. 在倾斜系统仿真前的设置1-2 jEr��/�*kv
R*~<?}Rr 设计好的位相数据已经自动地插入到打开的LPD中。对于一个反射SLM系统必须做出一些调整: sM)qz�O2wh
b���#%s��! 1. 设计的传输的采样距离必须根据实际SLM参数进行设置,因为倾斜元件一定会有其原始像素尺寸。 _,V
��9^��
v'Y)~Kv@�! 2. 此外,VirtualLab允许考虑矩形像素形状引起的光学效应因素。 �Bbuy�
y� HMs�T�m�}d
 D<9FS�xl6 D<9FS�xl6
j�UjgxP*7m 3. 在倾斜系统仿真前的设置3-4 �U��
X)k;h
My��'u('Q%
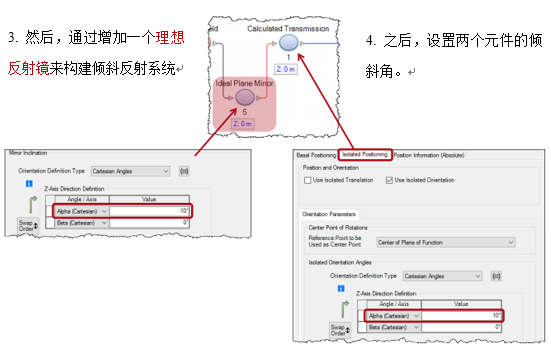 .>z�)6S_G� D �3��m4:z 4. 在倾斜系统仿真前的设置5 e(�7F|� G* .>z�)6S_G� D �3��m4:z 4. 在倾斜系统仿真前的设置5 e(�7F|� G*
<4,�hr�x&.
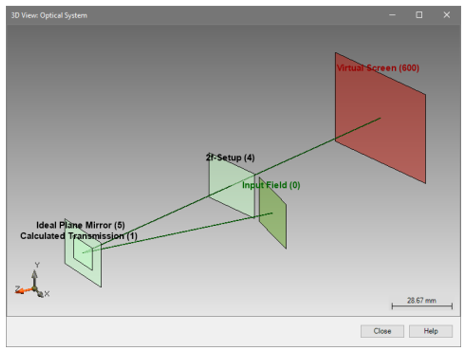
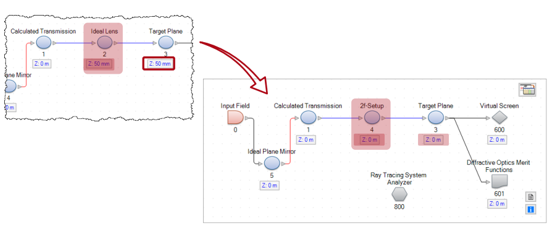 M&P�?/Zi=L RR�h0�G�>* 5. 因为理想系统元件并不适用离轴非傍轴的仿真,所以必须进行调整,通过: `I+��G7K�K 或者使用为了考虑相应的像差在稍后所用的透镜 (详见SLM.0003)。 �h=6�Zvf<x 或者—如此处描述的—通过2f系统元件,应用一个无像差的傅里叶透镜。 ��+*"u(7AV W�]Z;=-CBr 所用文件: SLM.0001_TopHat_SLM -Design_5_FinalReflectiveSetup.lpd d��L%?k@R �F�o�Y�_5/ 6. 系统的3维显示 IQ_2(�8K�v ] h3~>8�<� M&P�?/Zi=L RR�h0�G�>* 5. 因为理想系统元件并不适用离轴非傍轴的仿真,所以必须进行调整,通过: `I+��G7K�K 或者使用为了考虑相应的像差在稍后所用的透镜 (详见SLM.0003)。 �h=6�Zvf<x 或者—如此处描述的—通过2f系统元件,应用一个无像差的傅里叶透镜。 ��+*"u(7AV W�]Z;=-CBr 所用文件: SLM.0001_TopHat_SLM -Design_5_FinalReflectiveSetup.lpd d��L%?k@R �F�o�Y�_5/ 6. 系统的3维显示 IQ_2(�8K�v ] h3~>8�<�
 S]3K��5Z�| S]3K��5Z�|
^Glmg��}>q 为了方便演示,在不同的元件中引入了一个额外的距离来说明系统配置。这在仿真中并非必要。(2f系统已考虑了前后的传播距离) ((i%h^tGa;
�l��e�%&r� 7. 更高sinc级次评估 b��dh6i��i 4%L`~J4 wr 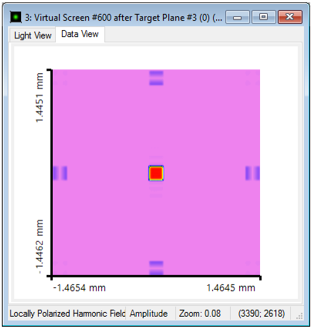 \T)��2J|mW \T)��2J|mW
!���6yo��D
A��[QU�Fk(
能够通过几个数据点模拟每个SLM的像素,从而考虑周期结构引起衍射效应。 9W�3zc��L8
由于每一个像素的矩形结构,产生的衍射级次以一个sinc函数(所谓的高级sinc级次)进行调制。 �;=goIsk{Q
这强度调制会影响一致性误差值,在IFTA设计过程中可以补偿这一效应。 -�*8��|�J;
?+-u�F���} 8. 系统的仿真结果 @~pIyy\_�
/w�plP+w2� 文件: SLM.0001_TopHat_SLM-Design_5_FinalReflectiveSetup.lpd v'�`VyXetl
},��9Hq~TA 9. 总结 \9Nd��"E[B
�)x�gOl�*D VirtualLab内置的工具,如: jOL�$k�iW0 迭代傅里叶变换算法(IFTA) Cf@~�W)K� 一个辅助会话编辑窗口。 p�x6�[1'|g p�x6�[1'|g
|



