-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-04-22
- 在线时间1968小时
-
-
访问TA的空间加好友用道具

|
软件简介 �\Q,5�Ne'o
3HX-lg�`�0 GLAD是由美国Applied Optics Research公司开发的一款专业的物理光学软件,特别适用于激光领域各种光学现象的仿真和评估!软件的开发者George Lawrence教授长期在光学领域排名NO.1的美国亚利桑那大学任教,在物理光学特别是激光领域拥有三十多年的研究经验。 y�f�e�4}0} GLAD使用复振幅来描述光束,采用快速傅里叶变换结合分步傅里叶算法进行传输分析,几乎能对所有类型的激光系统进行分析,或对物理光学系统做完整的端-对-端的分析处理,还囊括各种激光增益模型、数种非线性过程和许多其它的激光及物理光学效应。 �Vjr}"K�$Y GLAD的使用方法为调用内部各类“积木”进行建模、传输和分析。积木的类型包括:用于进行系统和光束初始化的命令;用于表征各类像差和相位屏的命令;用于表征各类传统光学元件的命令;用于表征各类非线性过程的命令;用于表征激光增益介质的命令;用于光束参数诊断的命令;用于计算结果输入、输出的命令等。只要将不同类型的积木有机“组装”起来就可以轻松实现任意光学系统的模拟。 ���F�OX�0�
Ng1[y4R}�� GLAD允许用户自定义变量、子程序、循环、方程式、以及其它高级语言结构。 28�xL�a�ob GLAD的应用领域包括:(1)包含传统光学元件,如各种透镜、反射镜、棱镜的光学系统的衍射传输分析;(2)光束质量的分析和评价;(3)二元衍射光学元件的分析;(4)各种波导的分析;(5)激光系统的分析:无源腔性能分析,含各类增益介质的有源腔分析;(6)多种非线性过程的模拟;(7)偏振效应分析。 LO�,k'g�g< 5�|o�i*b�
功能特性 Xm.��["&� GLAD在激光器模拟方面有着无与伦比的优势: /KCI�b�:�U 1.理论基础是衍射光学,通过分步傅立叶方法实现衍射传输和非线性现象(含增益)的模拟。并将物理光学和几何光学有机结合起来,实现对复杂系统的快速模拟。 I%ZSh]O�n� 2.提供多种激光器组件命令,如透镜(理想的和实际的),透镜阵列,反射镜,棱镜,自适应反射镜,双折射晶体,光栅,谱色散平滑元件,任意形状的光阑,光纤以及各种结构的波导等,可以快速建立激光器模型。 ��x[YW 3nF 3.准确模拟激光器谐振腔的特性,如输出的激光模式,输出功率与泵浦光之间的变化关系。通过改变谐振腔的参数(如腔镜的曲率半径、通过率、位置参数),可以观察这些因素对于输出模式、输出能量的影响。 Dt+u��f5o( 4.提供多种诊断函数,通过调用这些函数可以计算任意光场的参数,如Strehl比,M2因子,光束的半高全宽,环围能量(可聚焦能力的一个重要的衡量参数),输出光束的像差特性(拟合出Zernike多项式的系数),波前的RMS值,光学传递函数(OTF),光学系统的Rayleigh范围以及位置等。 )/?s^D$,�� 5.在非线性特性方面的模拟具有非常显著的优势,是目前唯一能够涵盖几乎所有非线性特性的物理光学模拟软件。可以模拟的非线性过程包括:各种增益过程(包括CO2增益模型、BEER定律增益模型、半导体增益模型、三能级系统模型、速率方程模型),自聚焦过程,倍频过程,和频过程,四波混频过程,Raman放大过程,大气湍流引起的热晕过程。 C�qw��`K P 6.采用有限差分方法模拟热透镜效应。 st(Y{G�s�� 7.可以模拟偏振过程以及部分相干光现象。 M4}zRr([.5
7C^W�<SUo� GLAD基本版的功能:
���kS(v|d x�o(�3<1mD □ 整合环境设计区(IDE) ��lO�^YAOY y���vK�KE □ 简单或复杂激光束追迹 �.^?Z3iA", T9P��u ��V □ 相干和非相干交互作用 3VmF1�w
�2 0�[S��rRpD □ 非线性激光增益模型 >U[YSsF�t6 @?<�1~/sfL □ 透镜和反射镜:球面镜、柱面镜 %;�tBWyq}_ UL\gcZ
Zkl □ 任意形状的光阑 Y>�'t)��PK r1Cq8vD*�m □ 近场-和远场-衍射传输分析 U^��xt�S g ;!/g���`*? □ 稳态和非稳态谐振腔模型 n�dB*�^nT� ^�o6&�|q� □ 为谐振腔设计提供的特殊功能 [%BWCd8Q~P i��@s�pd5. □ Seidel, Zernike, 和相位光栅像差分析 �wE0���9�% S�T^��{?Q □ 平滑随机数波前像差(smoothed random wavefront aberrations) ��ao)8i�e� !5�h@ua�r� □ 透镜和反射镜数组 `}&�}2��k� r#'�E;Yx�� □ 变量数组,可达1024x1024 �}�h�`�ddo �\d�c*!�Es □ 方形数组和可分离的衍射理论 ^Dw18gqr=@ _8�nT$!�\\ □ 多重,独立的激光束追迹传输 ���+�^@6{1 /kK:���{�� □ 自动传输技术控制 3�D"�?|rd~ �g|V0[Hnq6 □ 薄片增益模型 .2:S0=x�t< I=Xj;���\b □ 全局坐标系统 ��|+(Hia,X cu$i8$?t�� □ 任意的反射镜位置及方位设置 `�z�!?�!"= �j+>�&~��� □ 几何像差 AwO�'%+�Bv �lC(g&(\{ □ 大Fresnel数系统模拟 K
�yFR;.F- (J�/!9�NS: □ Zonal自适应光学模型(Zonal adaptive optics model) ��G .k\N(l �Z�:s:NvFX □ 相位共轭(phase conjugation) �WL/9r
*jW b_j8g{/�9� □ 极化模型 |�F^h�>^
x AIa#t#8$�{ □ 部分相干光模型 �n"��c3C)�
-�z$&lP]� □ ABCD传输 �0I@Cx��{$ J��PfE`NZ� □ 光纤光学和3-D波导 ck�4g=QpD{ �O��/2J�z� □ 二元光学(binary optics)和光栅 sOLR�*=F�{ PFnq:�G�^L □ 矢量衍射方法对高数值孔径(NA)物镜进行分析 s.G6?1VXlY �f�.y~�Sew □ M-平方因子评价 gR:21*�&cz w_e��U�U)z □ 相位修正的优化 �v\?J$Hd�d ;�0�`�p"T0 □ 模拟退火优化(simulated annealing optimization) �=c(3E�I'w
GcYT<pwN6� GLAD Pro增加的功能: y?�s8��UEC C2��� ] x� □ 非线性光学: �,�HM~��Zs 1.Raman放大,四波混频(Four-wave mixing) PC}m��.tE� 2.倍频 �*�=�y�mK* 3.自聚焦效应(self-focusing effects) &k2��n���t =q�-H��R+ □ 激光过程: k_<8�SG+�` 1.速率方程增益模型(rate equation gain) �hu+% X.F4 2.激光起振和Q-switching d~b#d�cv$" �N>}2�&'�I □ 优化: X@n\~�[.B 1.任意结构的最小二乘优化(least squares optimization) q�W�6}^a�a 2.使用者自定义评价函数(merit function) d��(-$ {
c 3.任何的系统参数都能进行优化 �?nAKB5=�� ��T>;Kq;(9 □ 几何光学: t846:�Z%[� 1.精密表面配合光线追迹 eZ�WR)�+aq 2.透镜组的定义和分析 �d@72z r� ��)bG�d++2 □ 大气效应: �|ozla�j�� 1.Kolmogorov扰动 Z/ypW�oV(� 2.热致离焦(thermal blooming) )d�|hIW]7(
f{Dc��R��" 典型案例图示 CxOBH��89(
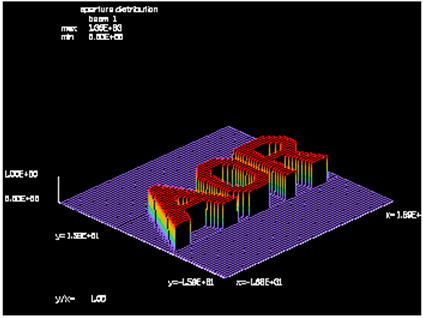
KVrK:W--�p 任意形状的光阑 �yNb
:zo�T
~t~�5�ctJ@
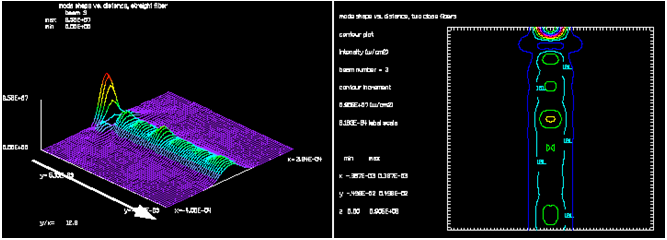
 pH1 9�"=p< �:9E��_L2M S形光纤波导 ;|�J�a|@82 pH1 9�"=p< �:9E��_L2M S形光纤波导 ;|�J�a|@82
�j>��0~"A
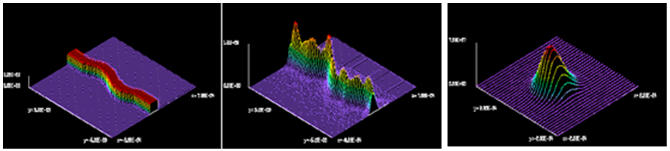 )*Qa�9�+�: P��yx$$�cj 空间光耦合进入光纤 �^��:RDu q '0xJp|[xVP )*Qa�9�+�: P��yx$$�cj 空间光耦合进入光纤 �^��:RDu q '0xJp|[xVP
 h8yv:}XU*� h8yv:}XU*�
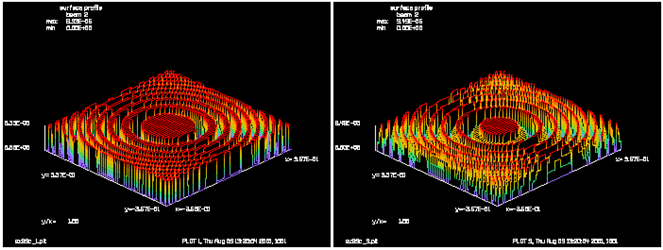
;�#�$z�HR� 二元光学元件 a;��A&>Ei}
��0��+\�~^
 �=/��Dp�* ;')T}w�u�q 剪切干涉仪 H5N(M��ihT �=/��Dp�* ;')T}w�u�q 剪切干涉仪 H5N(M��ihT
-e{H�8�r�o
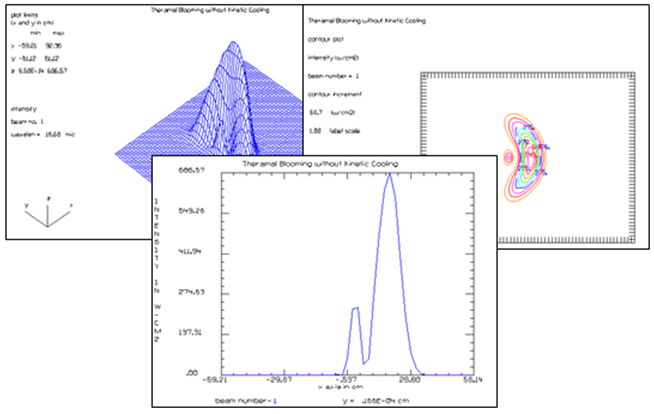
 -^�(NI��l' ��N�3};M~\ 大气热晕 ib�OXh� U� -^�(NI��l' ��N�3};M~\ 大气热晕 ib�OXh� U�
y�{�eZ�rX|
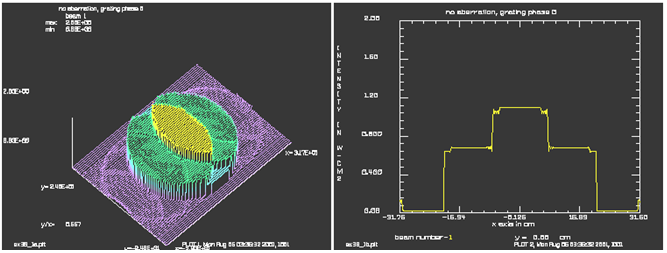
 ��W�&>+�~A !!�c.cv�'� 谐振腔分析 JAA� P5u�r ��W�&>+�~A !!�c.cv�'� 谐振腔分析 JAA� P5u�r
�`�f:5w�^A
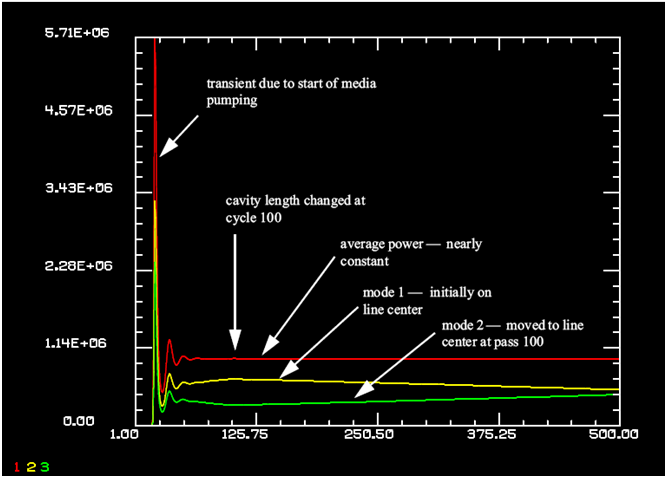
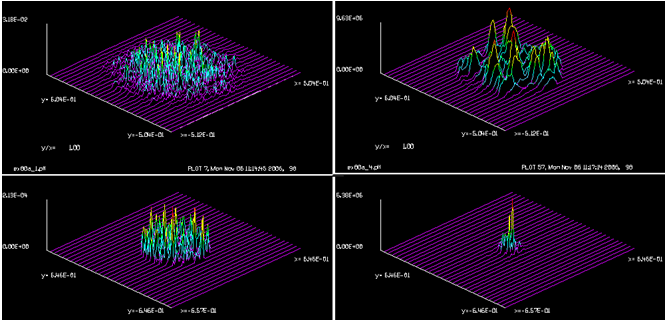
 C3�%,�p�Dh rr[9sk`^�H 模式竞争 !H��XdUAKu C3�%,�p�Dh rr[9sk`^�H 模式竞争 !H��XdUAKu
J�Hf}L�Z�u
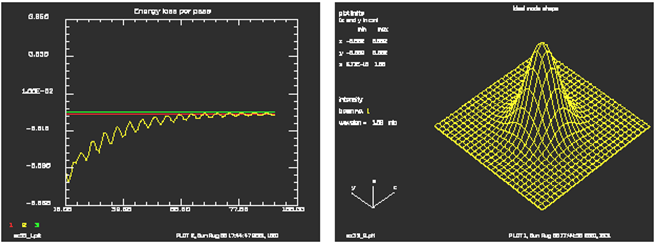
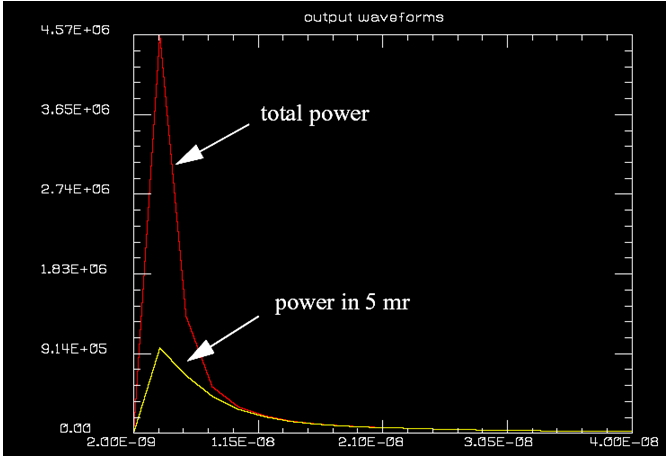
 �wBcD�L/(> K�6���,5C0 调Q激光器输出特性 b*����6c. �wBcD�L/(> K�6���,5C0 调Q激光器输出特性 b*����6c.
L�h &L5�p7
 "gCSbMq(Vq "gCSbMq(Vq
o�mV.Qb'NS
 �O�z9k.[j( F|V co]"S1 �O�z9k.[j( F|V co]"S1
Y�V�� 9*B QQ:2987619807 E�MH?z2iGd
|



