-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2025-04-23
- 在线时间1766小时
-
-
访问TA的空间加好友用道具

|
软件简介 8�Mbeg
�,P
l�]�]l���� GLAD是由美国Applied Optics Research公司开发的一款专业的物理光学软件,特别适用于激光领域各种光学现象的仿真和评估!软件的开发者George Lawrence教授长期在光学领域排名NO.1的美国亚利桑那大学任教,在物理光学特别是激光领域拥有三十多年的研究经验。 �.E@|D6$D� GLAD使用复振幅来描述光束,采用快速傅里叶变换结合分步傅里叶算法进行传输分析,几乎能对所有类型的激光系统进行分析,或对物理光学系统做完整的端-对-端的分析处理,还囊括各种激光增益模型、数种非线性过程和许多其它的激光及物理光学效应。 3bNIZ#`|MB GLAD的使用方法为调用内部各类“积木”进行建模、传输和分析。积木的类型包括:用于进行系统和光束初始化的命令;用于表征各类像差和相位屏的命令;用于表征各类传统光学元件的命令;用于表征各类非线性过程的命令;用于表征激光增益介质的命令;用于光束参数诊断的命令;用于计算结果输入、输出的命令等。只要将不同类型的积木有机“组装”起来就可以轻松实现任意光学系统的模拟。 .WQ+A�E8Q�
/CIh�2
]#e GLAD允许用户自定义变量、子程序、循环、方程式、以及其它高级语言结构。 $8cr�N$y�e GLAD的应用领域包括:(1)包含传统光学元件,如各种透镜、反射镜、棱镜的光学系统的衍射传输分析;(2)光束质量的分析和评价;(3)二元衍射光学元件的分析;(4)各种波导的分析;(5)激光系统的分析:无源腔性能分析,含各类增益介质的有源腔分析;(6)多种非线性过程的模拟;(7)偏振效应分析。 ac�eZ3�U>W ILi�c�.@st
功能特性 Y+3!f#�exm GLAD在激光器模拟方面有着无与伦比的优势: >~\89E�02� 1.理论基础是衍射光学,通过分步傅立叶方法实现衍射传输和非线性现象(含增益)的模拟。并将物理光学和几何光学有机结合起来,实现对复杂系统的快速模拟。 �F]I=+T��� 2.提供多种激光器组件命令,如透镜(理想的和实际的),透镜阵列,反射镜,棱镜,自适应反射镜,双折射晶体,光栅,谱色散平滑元件,任意形状的光阑,光纤以及各种结构的波导等,可以快速建立激光器模型。 ^xZ
�e2@�� 3.准确模拟激光器谐振腔的特性,如输出的激光模式,输出功率与泵浦光之间的变化关系。通过改变谐振腔的参数(如腔镜的曲率半径、通过率、位置参数),可以观察这些因素对于输出模式、输出能量的影响。 �3.��)b4�T 4.提供多种诊断函数,通过调用这些函数可以计算任意光场的参数,如Strehl比,M2因子,光束的半高全宽,环围能量(可聚焦能力的一个重要的衡量参数),输出光束的像差特性(拟合出Zernike多项式的系数),波前的RMS值,光学传递函数(OTF),光学系统的Rayleigh范围以及位置等。 nJbbz�Q,e 5.在非线性特性方面的模拟具有非常显著的优势,是目前唯一能够涵盖几乎所有非线性特性的物理光学模拟软件。可以模拟的非线性过程包括:各种增益过程(包括CO2增益模型、BEER定律增益模型、半导体增益模型、三能级系统模型、速率方程模型),自聚焦过程,倍频过程,和频过程,四波混频过程,Raman放大过程,大气湍流引起的热晕过程。 l)��-�Mq@V 6.采用有限差分方法模拟热透镜效应。 �]0r�|_)s� 7.可以模拟偏振过程以及部分相干光现象。 �YQ0)5���}
W8g'��lqc| GLAD基本版的功能: �S{K0.�<,E Mzd[fR�5a8 □ 整合环境设计区(IDE) 2��:LHy[{5 v~/~��@j�v □ 简单或复杂激光束追迹 C�b:�gH}j T,_(?Y��JW □ 相干和非相干交互作用 hwq�bi "o� >� �MG�>=A □ 非线性激光增益模型 tW�;:��-� **>/}.%�?K □ 透镜和反射镜:球面镜、柱面镜 �#p�Hs@uvO D.%B$Y�;G □ 任意形状的光阑 |�/ }\�6L] RL[E� X5U □ 近场-和远场-衍射传输分析 F6�hmku>\1 n$�(p-po�� □ 稳态和非稳态谐振腔模型 _3Cn�{{ A0 |~�<N -~.C □ 为谐振腔设计提供的特殊功能 Ad�dea�B5< *X��Wq?hi� □ Seidel, Zernike, 和相位光栅像差分析 wLV~F[:��
7'N��S��9| □ 平滑随机数波前像差(smoothed random wavefront aberrations) :|1��.seLQ <:�|3rfm�# □ 透镜和反射镜数组 �Q�j�Pj[c� jw
,izxia □ 变量数组,可达1024x1024 �3CE�[(� � N:"��C+�a( □ 方形数组和可分离的衍射理论 � o�K��9'� [��4J�6�iF □ 多重,独立的激光束追迹传输 bY~@}gC**@ ,DnYtIERo� □ 自动传输技术控制 8p1ziz`4>$ nIf�CF,�6, □ 薄片增益模型 ,L�OQD�Iyn �GYB+RU}], □ 全局坐标系统 m?[�5J)�eR {I{��:GcS� □ 任意的反射镜位置及方位设置 V84*0&q�OW �#hw/^AaD- □ 几何像差 i.1�U|P�i� pe&�UQ �C^ □ 大Fresnel数系统模拟 Bf4%G�,o�5 A �6��99FQ □ Zonal自适应光学模型(Zonal adaptive optics model) o�0z67(N&g �q�1��k��{ □ 相位共轭(phase conjugation) 0F;,O3Q� La�[K!u\�B □ 极化模型 �$A<E�Sfrs �PKq�-@F%X □ 部分相干光模型 D�mdy�=&�G ��'b"TH�^\ □ ABCD传输 %"A_!<n@*` 1M�A@JA�:T □ 光纤光学和3-D波导 H'�J|���U| �o�'%e��I� □ 二元光学(binary optics)和光栅 7k�=f�Z$+O Z$�KV&�.=+ □ 矢量衍射方法对高数值孔径(NA)物镜进行分析
s* j�fMY =fyyq�b�4� □ M-平方因子评价 �`^��U�&#K hh.Q\qhubB □ 相位修正的优化 �ZYtiM��BJ gY9\o#)��< □ 模拟退火优化(simulated annealing optimization) ?q9�1�:H��
%kU'h�zLg GLAD Pro增加的功能: �v@u<Ww;=@ (�xyS�7q]m □ 非线性光学: keqcV�2�3k 1.Raman放大,四波混频(Four-wave mixing) %�c6E�-4b� 2.倍频 0-2"Fd�eQU 3.自聚焦效应(self-focusing effects) �</�E>t�MW f�UcLf��nr □ 激光过程: =�K$,E�4* 1.速率方程增益模型(rate equation gain) E,*&B�D�W� 2.激光起振和Q-switching =ak7ld�A=2 [>w%�CY<Fd □ 优化: z \?UG�xu} 1.任意结构的最小二乘优化(least squares optimization) E20 :uZ�7\ 2.使用者自定义评价函数(merit function) !0fI"3P@�r 3.任何的系统参数都能进行优化 KAb���(NZK 0�rzVy/Z(� □ 几何光学: yBn_Kd���� 1.精密表面配合光线追迹 R,Ml&4pZ} 2.透镜组的定义和分析 3�q� &k�� �d#�T?Q_3b □ 大气效应: D[�>W�{g
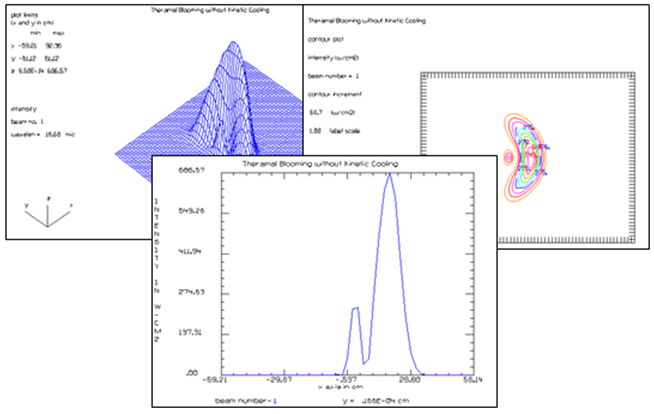
$ 1.Kolmogorov扰动 4#��E���ul 2.热致离焦(thermal blooming) MD�'>jO�;n
6[�==BbZ�� 典型案例图示 9��qH[o?]�
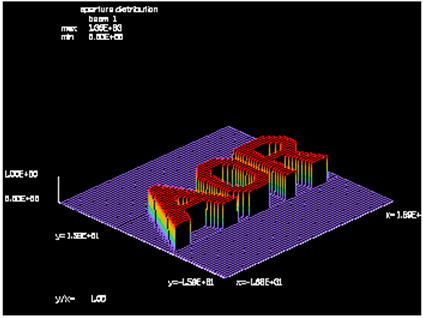
FDLd&4Ex�� 任意形状的光阑 A4_>LO_�qL
\f"?Tv-C'
 SFO&=P�:U� _+z��V�p�Z S形光纤波导 (fXq<GXAn/ SFO&=P�:U� _+z��V�p�Z S形光纤波导 (fXq<GXAn/
a�c6��*v49
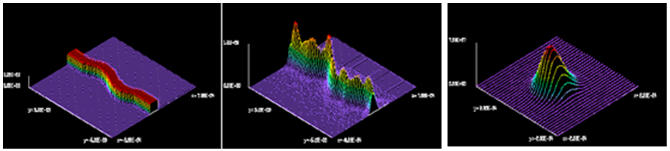 f�S./y=j(X #%cR�%���Z 空间光耦合进入光纤 6�o��jo##j 6q�%ed
UED f�S./y=j(X #%cR�%���Z 空间光耦合进入光纤 6�o��jo##j 6q�%ed
UED
 �F�p:3#B�h �F�p:3#B�h
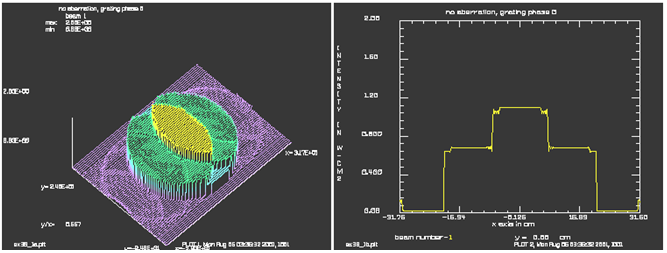
#?m�{�YT{P 二元光学元件 0>Fqx{!heq
sx�-F8�:Qa
 BLW�]|p|1: .Z5[_'�T�� 剪切干涉仪 �},6*Y*?�{ BLW�]|p|1: .Z5[_'�T�� 剪切干涉仪 �},6*Y*?�{
37�K�U~9-A
 �v*L
�'{3f pF=�'jj�51 大气热晕 _$(GRNRY�K �v*L
�'{3f pF=�'jj�51 大气热晕 _$(GRNRY�K
=>YvA>iz�E
 .�&(8(��C� �
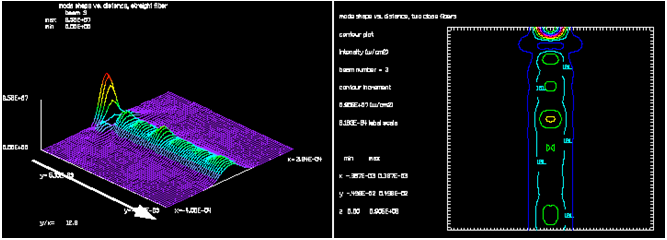
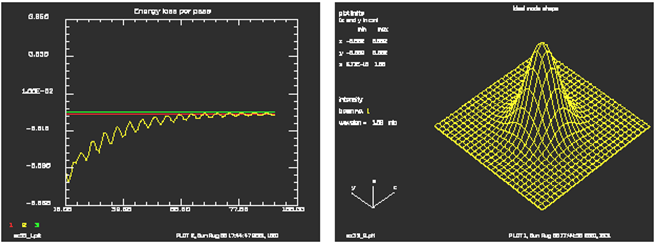
^Fp=y�,D 谐振腔分析 cQ,9Rnfl�, .�&(8(��C� �
^Fp=y�,D 谐振腔分析 cQ,9Rnfl�,
��(�C~dkR?
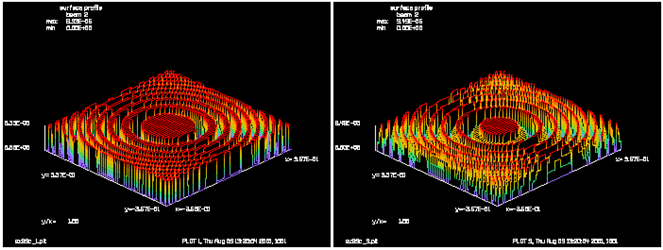
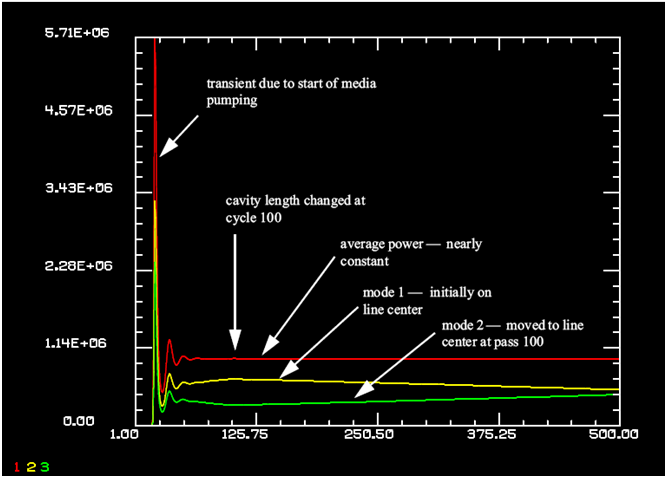
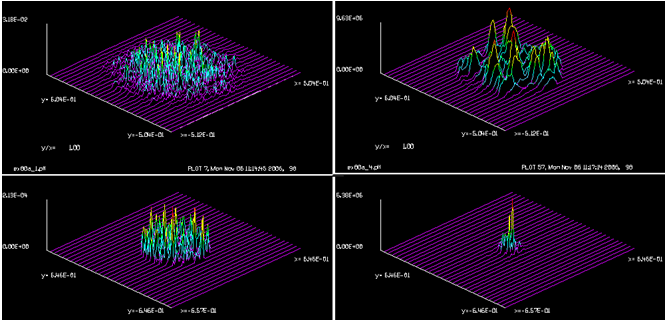
 lJj&kV�H�b 1NG��y�aI� 模式竞争 -�k��c(u1! lJj&kV�H�b 1NG��y�aI� 模式竞争 -�k��c(u1!
�tw86:kYEz
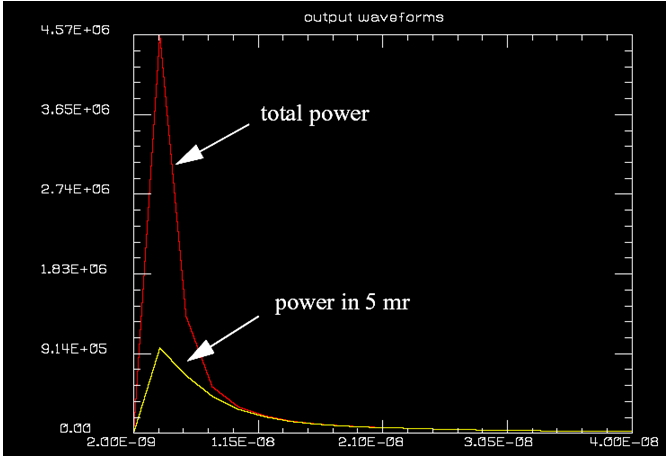
 6U�I>���GQ LR\z�y8y�] 调Q激光器输出特性 �;fx1!:;�. 6U�I>���GQ LR\z�y8y�] 调Q激光器输出特性 �;fx1!:;�.
f+^c@0que
 lA4hm4"i(, lA4hm4"i(,
x3;jWg��~'
 ��x@� 6\Ob #Gp
M22d'( ��x@� 6\Ob #Gp
M22d'(
gA:[3J,[�; QQ:2987619807 2+&R"�#�I�
|



