1. 系统详细内容 W�0MgY%Qv[ 光源 [R1|=k�G�U — 具有发散角的红外激光二极管 �}J6��:D]Q 元件 e|:\Ps�`8� — 折射准直系统及具有双合透镜的聚焦系统 q]yw",m�uT 探测器 Q�OK,����- — 点列图 $}vzBuWHwN — 强度分布 sCw>J#@�2> — 光束参数 ;%�d�<U�k? 建模/设计 JmD�x�s�b^ — 光线追迹:初始优化。 V|@�bITJ?7 — 场追迹:进一步降低点尺寸。 �"�Y^j=?1k LU�;zpXg\� 2. 系统说明 bvJ@H
Z$� ��{St���-� 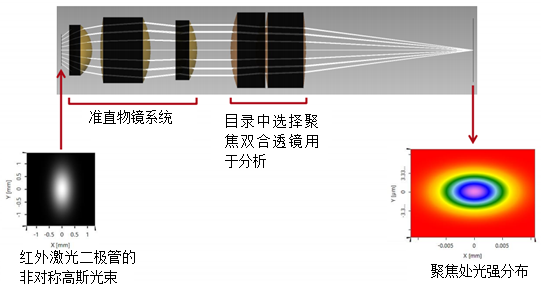 q6rkp f,Tl
q6rkp f,Tl
pY�zo��p�4 光束参数的参数优化 CyL�wCS{V\
 "���P�?�O1
"���P�?�O1
h2x9LPLBxT 对使用光线追迹所设计的透镜应用场追迹进行进一步优化,以提高透镜性能。 UapU:>�!"` 第一步:利用光线追迹进行快速的预优化以获得合适的起始点以用于随后场追迹优化。 �%y9sC1T� 第二步:将衍射效应考虑在内,应用场追迹进行精细化优化。 ��N@t��Kgx
[��KgO:},c 应用示例详细内容 n%2�9WF6Zf
系统参数 ?7V�~>i8[�
1. 应用实例的内容 ;<m�*ASM.3
L��3�H��C- 该案例是一组相关示例中的一部分: G�=[�<KtWa
NA2�={R�B; BDS.0001,BDS.0002以及BDS.0003主要关于一个折射型光束传输系统 YF�S6���YA �OnE%D|Tq= 2. 设计任务 @�*<0:Q�|m mS�T8�+R@S 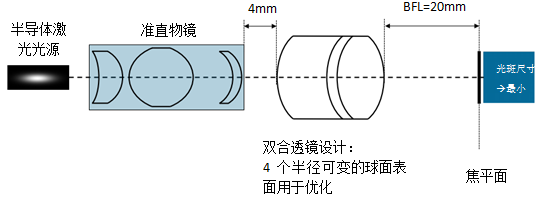 ��pl3a�p(/
��pl3a�p(/
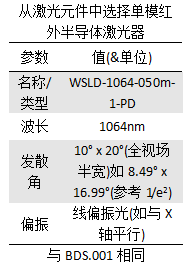 #S�9J��9k� JD��R�_k�� 3. 参数:非准直入射激光束 q�\?p' ��i �J;Z2<x/�H
#S�9J��9k� JD��R�_k�� 3. 参数:非准直入射激光束 q�\?p' ��i �J;Z2<x/�H 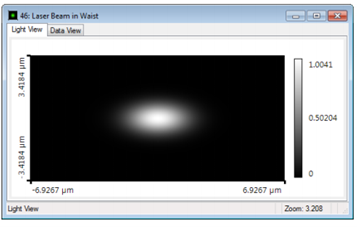 "P#����1=�
"P#����1=�
�8Yk*�$RR9 4. 参数:准直透镜和后续光线 m�-azd�~r[ Dq~�;h \=' 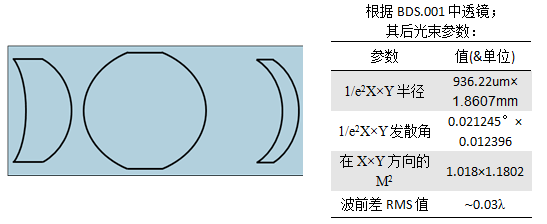 )aGSZ�1`/ �tnnGM,"ol 5. 参数:双合透镜 ���o�$</At
)aGSZ�1`/ �tnnGM,"ol 5. 参数:双合透镜 ���o�$</At (*)来自肖特2014玻璃
R ����39_! v.<mrI�#�? 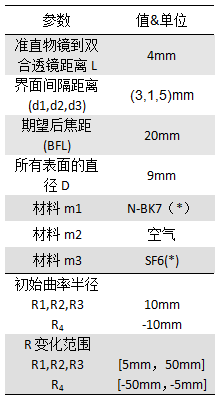 oDu6W9���+
oDu6W9���+ 应用示例详细内容 P�#�!���N
仿真&结果 5C1�EdQ4S0
1. 如何优化(预设置) 1UJ�r�P�M%
X�EA5A.�uc 通过双合透镜的优化,使给定条件的准直入射光束聚焦在透镜后20mm处。 ��8��u~�� 应用参数优化文件自动执行具有可变曲率半径的迭代仿真,直至获得最小的聚焦点。 +={�K -g7U 由于整体设置的第一部分不变,我们直接将计算所得的光分布放在双合透镜前作为起始点。 YhV<.�2�^k 为评价聚焦光斑,在目标焦平面处放置光束尺寸或光束参数探测器。 qJ�`:�$�U
��I[k"I(�� 2. 光线追迹:预优化 s�.b�o;lk� ^K"�B�Q~-w 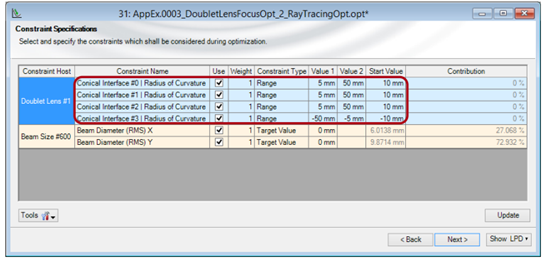 �DNq(\@x[!
�DNq(\@x[!
1�}a4AGAp 3. 光线追迹:优化过程 {,sqU�q �(
p"
>�*WQ � 通过光线追迹仿真,在142步优化过程中,VirtualLab变化4个表面的半径,并找到最小焦点直径。 3<W�%z]k@M ~�C�%I'z'�
S�C~k4&xy� 4. 光线追迹:预优化后的聚焦表面 an"�~��n`g
O�_�1[Ki�Z VirtualLab列出了参数以及优化的结果。在最有一列中显示了4个表面的曲率半径预优化结果。 3:nB�l?G<�
�dWQs�C��| 5. 光线追迹:3D评价 �HQm_ �K0$ SdYf�^@%}F 3D光线追迹系统分析器显示了预期的聚焦效果 IyHbl_�P ^
6. 光线追迹:聚焦点尺寸 V_gKl;Kfe8
�A�_�9^S�!
 P!|Z�%���H
P!|Z�%���H
??p%_{QY~b
G��~<UP�(G
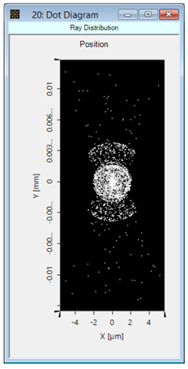
在光线追迹优化过程中,我们利用光束尺寸探测器评价光斑尺寸。 oV���:oc�,
由此产生的光束直径在X和Y方向上的均方根有效值(指的是质心):2.27μm X 2.60μm(小于衍射极限)。 b�`-�|7<s ZEI�,9�`t! 7. 改进:由光线追迹到场追迹 =|a�gW.�l
>E+g.5
,:W 因为存在衍射效应,基于几何光学的仿真不能够对光实际的分布进行评价,。 Jn�s�J]_<� 在焦点区域内的情况 ��Cf�U|]�< 场追迹仿真可以考虑所有的波动光学效应。 �=lJ
?y�uc ;Z�{D�@g+ 因此,你可以 )�k,�n�}�� 利用场追迹仿真检查和改进 @y��e!? % 你的光线追迹设计。 ��AChz}N$C
�+�>q#eUS) 8. 场追迹:中间结果 Os"('�@jd> 因此,为了更有意义的结果,我们运行物理光学场追击仿真,考虑了衍射效应的同时,应用基于第二动量理论的光束参数探测器。
Bx#i?=�*W 场追迹结果值“束腰距离X×Y”已表明,由于衍射效应,光线追迹优化的最佳的聚焦为值与预期的距离20mm不同。 DRQx5f�gL 因此,我们进行基于场追迹的第二步优化,并以预优化后的表面数据作为初始值。 �h`|��04Q� ~'_cBJ
'XD
 S\TXx79PhC ��en< $.aY 9. 场追迹:最终优化 0M�HiW�=� ?A3L8^t�R�
S\TXx79PhC ��en< $.aY 9. 场追迹:最终优化 0M�HiW�=� ?A3L8^t�R� 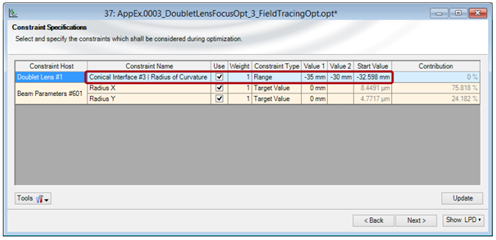 l\s!A�&�L�
l\s!A�&�L�
cFL~<
[>�_ 10. 场追迹:最终结果 �ua���tU�o
SL4?E<J�b� 通过优化最有一个表面,我们改变束腰接近接近期望位置。因此,聚焦点尺寸进一步减小。 Q6Gw!!Z5EA 即使对于这个低数值孔径(NA),场追迹能够使我们改善最终聚焦点半径: )Zr�9�
`3[ 0.12um×0.24um(1.4%×4.8%) �'�}_r/l]K -x//@�8" � p)I�L(_X)� 11. 结果补偿(第1步&第2步)&半径 0\%g@�j-aD
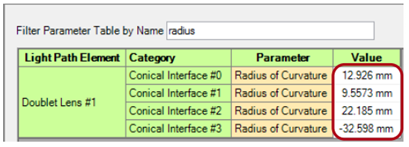
�S!b18|o" 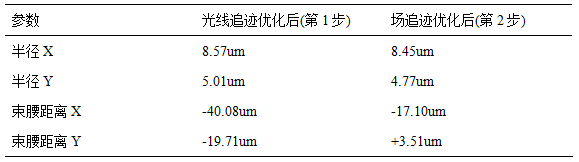 _nbr%P�D�, $"kPzo~B_� 在参数概览中显示了4个圆锥面的最终曲率半径,构成了双合透镜。 @V*d�F|# /
_nbr%P�D�, $"kPzo~B_� 在参数概览中显示了4个圆锥面的最终曲率半径,构成了双合透镜。 @V*d�F|# /
jfuH�Z^�YA
 �aas�.-N�T �xR����1G� 12. 总结 W" 5nS =d%
�aas�.-N�T �xR����1G� 12. 总结 W" 5nS =d%
qNEp�3W�Y: 对使用光线追迹所设计的透镜应用场追迹进行进一步优化,以提高透镜性能。 5B�hR4�+1J 第一步:利用光线追迹进行快速的预优化以获得合适的起始点以用于随后场追迹优化。 NHGT�V$T`1 第二步:将衍射效应考虑在内,应用场追迹进行精细化优化。 L|'^P�3#7` So a�qmY;+ 13. 扩展阅读 Vx_33";S\� 以下文件给出了如何在VirtualLab中设置和分析激光系统的更多细节 [C "\]�LiX 启动视频 �Y�2
@8�B6 — 光路图介绍 K!�-�OUm5A — 参数运行介绍 �p>B2�bv+L VPUVPq~�&
3"y 6|e/�5 QQ:2987619807 bH�wEd�%f



