��飺
����̽��Ͳ��
ϵͳ(LIDAR)
N�X`�*%K�� ^bg2�[��FV �����ĸ�ʾ�������ʾ�����ʹ��OptiSystemģ�����Ͳ��ϵͳ��LIDAR�����������£�
�� M�cH>"` c�0��B|F� �����������ʱ�����
�voP7"Dl[� ���Ʋ��
X[
q+�6�19 ��Ƶ��������FMCW��ֱ�Ӽ����͵�Ƶ��������ɲ��
<h�%O?mkC� 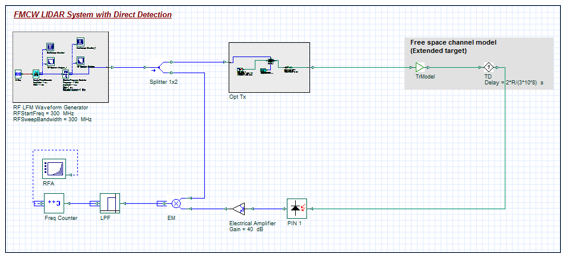 p�oG�c �a1 Nkxm���m/Z
p�oG�c �a1 Nkxm���m/Z ͼ1.ʹ��ֱ�Ӽ���FMCW LIDAR OptiSystemģ��ʾ����ͼ
::Ke�^d��p @k[R/,#'[t 1.���(����ʱ��)
���Fu��I73 .�+7;)K
�� ԭ�����
B`*Zs�S=R- ���S}A�PQ� ʹ�ü������壬����ʱ���෨������������ӷ���װ���н���Ŀ�겢���ؽ����������ѵ�ʱ�䡣 Ȼ��������[1]
�D�d;N���z  �kt`nbm|aw O5�$/5�5PI
�kt`nbm|aw O5�$/5�5PI c�ǹ��١�
�p' M%XBu� G9g1hie@�% �����ź�
�����Ǹ�����չĿ��
ģ��ȷ���ģ���������[2]
i1H\#��;`$  ~�\{^%~[48 �|
N�0Z-|
~�\{^%~[48 �|
N�0Z-| ���� Pt �Ǵ����ʣ�D �ǽ��������� �� Ŀ�귴���ʣ�

�Ǵ������ϵ����

�ǹ��ϵͳ������ӣ�R ��Ŀ�귶Χ��
-~?J+o+Pr" hxCvk/7�sT Ϊ�˿ɿ���ȷ����������ij���ʱ�䣬ʹ�ú�ȶ�ʱ����[3]��������Cpp���ʵ�֣���
y_\p=0t�8� 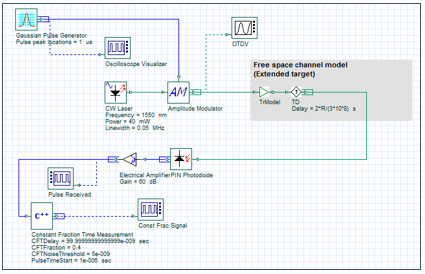 |��D, ��+P 3a.k�Bzus� �wP�[t0/dl
|��D, ��+P 3a.k�Bzus� �wP�[t0/dl ͼ2.����ǣ�TofF������
f�Rg`UI4w} Q�+�4�Xs.# Ӧ�ð���
:'�#TCDlOb m[j�7�0jYe �����ʾ���У�һ����˹����(��ֵ����ʱ��= 1 us) ������������Ŀ�귴��(�����ɿռ��ŵ�ģ�� (��չĿ��)����) ) ������˥�����ӳٺ�ͨ��Cpp�����ȶ�ʱ���������ͺ������յ����źš�
w�"R:\@ �F ���/rUo�{j ���յ����������ڳ���ʱ��6.02e-06�봥���ģ��������ָ÷�ΧΪ751.27 m����ȫ��
������Χ����Ϊ750 m��Ƚϣ��� ͨ���ı��������CFTDelay��CFTFraction��CFTNoiseThreshold�����ĺ�ȼ������������ȡ�
^G6RjJxqp8 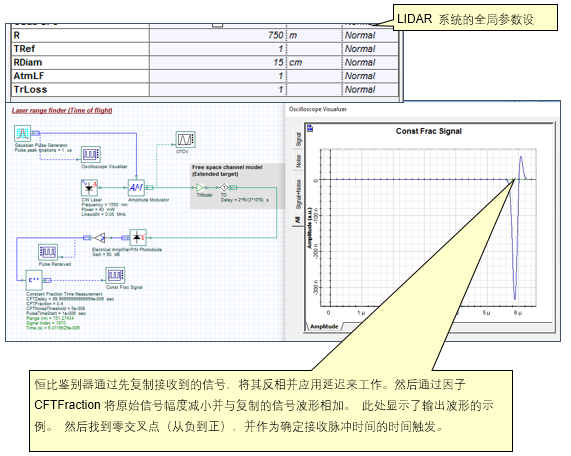 �EEGy!b�ff �%f($*��l.
�EEGy!b�ff �%f($*��l. ͼ3.������ϵͳ
B�}PIRk@a1 _.L4e^N&UO 2.���(����)
.e_cga�d : E��b=}�FuV ��������/Ŀ��ľ������һ�ַ�����ʹ�����Ʋ���ǡ� ���ø÷�����
��Դ���ض�Ƶ��Rf�����Ʋ��ҳ���Ŀ�괫�͡� Ȼ����PIN�������ܸ�������������ⷴ���źš� ������Դ��Ͷ����ź� ()������ԭʼ�ο��ź����Աȣ��Խ��в��������ڼ������ [1]:
v|U���(�+O  (SKVuR%Jj� os/vt�yP:a 0�G�Jn_@hr
(SKVuR%Jj� os/vt�yP:a 0�G�Jn_@hr Ϊ����߸�ϵͳ��
�������ο��ͽ��յĵ����źſ����뱾������RLO��ϣ��Խ����յIJ��α�Ƶ���ϵ͵�Ƶ�ʣ�RLO-Rf���� Ȼ�����Щ�źŽ��д�ͨ�˲����Լ���������������λ�ƣ�ʹ�����ǵĿɱ��Cpp��������д�����
~gGZmT�b�� 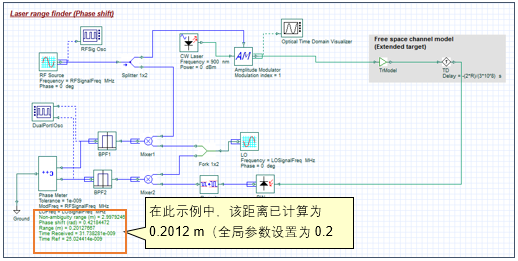 �`u�C�@�nJ �**}h&k&%2 `Fo�xP����
�`u�C�@�nJ �**}h&k&%2 `Fo�xP���� ͼ4.����ǣ����ƣ�����
H^YS�J���6 `w]s��;�G[ 3.���(FMCW)
6R=W��}q4� m���dR�U^n �������ķ����ǵ�Ƶ��������FMCW��LIDAR�� �Ѿ�����������ģ�ͣ�ֱ�Ӽ���FMCW LIDAR����ɼ���FMCW LIDAR�� ����ģʽ�Ĺ���ԭ����ͬ�� Ƶ�ʵ��ƵĹⷢ���������źŵ�Ŀ�꣬����ͨ��
����������ⷴ���źŲ���ԭʼ���Ե�Ƶ��LFM���źŻ�ϡ� ���Ž����źŵ�ʱ�ӣ�������Ƶ�źš� ʹ��Ƶ�ʼ������������ǵ�Cpp���ʵ�֣�����������Rf�źţ�Ȼ���������¼���[4]��
"~D�]E7Q3y 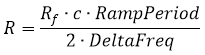 �w8n|B?Sr� =�}.EY �iD
�w8n|B?Sr� =�}.EY �iD ����RampPeriod����ȫ�ֲ�����Time window ��DeltaFreq ���ڲ���RFSweepBandwidth������ϵͳRF LFM Waveform Generator��������������ã���
�tKp�mm`2 s`0QA!G{�- �������ϵͳ֮���Ψһ������ʹ��ƽ���ɼ첨������һ��ʹ�������������ڻ��ǰ�ָ�������źţ���������ṩ���ߵ������ȣ���Ϊ��������ɢ���������ƣ�
���DZi!�aJ 0qX3v�<+[6 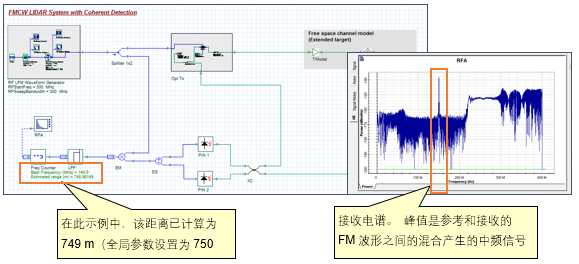 {G�C�?S�aK 3Y�Vi"
k?2
{G�C�?S�aK 3Y�Vi"
k?2 ͼ5.FMCW��ɼ�Ⲽ��
2Lx3=�[i�k [1]: Laser ranging: a critical review of usual techniques for distance measurement, Optical Engineering, Vol. 40, No. 1. (2001), pp. 10-19 by Markus C. Amann, Thierry Bosch, Marc Lescure, Risto Myllylä, Marc Rioux[2]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013) ��By�%�=W5 [3]:Fast-Timing Discriminator Introduction, Ortec Inc., http://www.ortec-online.com/-/media/ametekortec/other/fast-timing-discriminator-introduction.pdf?la=en (accessed 10 Feb 2017) )I3�NeKWz� [4]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)



