打开“机械补偿变焦
系统设计”命令是默认的就是三组元连续变焦系统设计如图1。
L]!![v.�VY 图1.变焦系统高斯计算窗体 �h�!|U�j��
k0ai#3�iJ 以三组元变焦结构形式为例,说明机械补偿式连续变焦系统设计方法。首先从中选择“三组元变焦”,窗体上显示三组元连续变焦
光学系统的典型示意图,下方有一些提示供填写对系统设计要求的
参数指标,其中包括一些性能指标和结构参数。性能指标包括系统最小
焦距,也就是变焦的短焦焦距、系统变焦比、像面高度以及系统相对孔径(F数)等。设计参数包括前固定组焦距以及各组分之间的高斯间隔。在选择组分间隔时可以选择前固定组与变焦组之间间隔,还可以选择系统后工作距离,在满足后工作距离条件下计算前固定组的位置距离。此外前固定组的焦距值可以选择正值或负值。前固定组焦距为证时是负组变焦,反之为正组变焦。由于初始结构外形尺寸计算为高斯计算,即薄
透镜计算,因此在填写各组分间隔时要为实际系统的透镜厚度留有余量。
+�WMXd.iN, �{�I�$i��D ① 外形尺寸自动计算
.|hsn6i�/- vyJ8"
#]qY 根据以上要求按表中内容填写完毕,三组元机械补偿式变焦系统的外形尺寸计算工作立即自动完成。此时如果选择工具条上“图文”按钮就会显示系统外形尺寸计算结构数据。如果选择工具条上“动画”按钮还可以显示系统变焦运动的动画效果。如图2和图3。
w%iw�xo��� ��8��zlvzp 图2.外形尺寸计算数据 _#&oQFd�YR
S$�$S�Ly:P 图3.变焦系统变焦运动动画 B��&B:�P
]a�dgO��lM 选择“凸轮”即可看出该设计结果的凸轮
曲线示意图及曲线数据如图4。
2�PRii��L@ 图4.变焦系统凸轮曲线 .�Tq8Q��dl
/^k%�s�G@? 对于目标在有限距离的
光学系统,比如显微变焦系统,可以在窗体左上角的下拉式菜单上选择“有限距离”,此时窗体显示如图5。
6_�u�!�{� 图5.物体在有限距离变焦系统设计示意图 (S�gsy�^|N
�%g@\S�R.� 在显示设计示意图时,为了清楚表达物象关系,利用窗体右上方选择按钮可以显示如图5右侧示意图。其余设计与目标在无限远一样。
"�J���LE�� 为保持系统像面照度一致,连续变焦光学系统一般都把系统孔径光栏放在后固定组位置。由于光栏位置过于靠后会使得系统外形尺寸较大,有时也需要把孔径光阑设置在其他组分位置上,由于此时会因在变焦过程中影响系统相对孔径大小,必须使用可变光栏保持相对孔径不变。但也可以根据需要使用固定光栏或改变光栏可变系数求得合理外形尺寸数据 。为合理设置孔径光阑位置,可以利用窗体上“光栏位置”下拉式文本框选择具体位置,如图6。
n^l�*oE�l� 8OV�=;aM?{  ����4�uMMf
����4�uMMf 图6.调整系统孔径光阑位置设计窗体
QKts�-b�[3 �uYg �Q?*Z 图7是光栏分别在后固定组补偿组、变焦组以及在前固定组不同位置的情况。
Z4As'a��l� 图7.孔径光阑不同位置效果图 (h�ZNW�Q0�
qp�CaW0�]7 孔径光阑选择在后固定组,光栏不需变化即可保持系统相对孔径不变,否则还可根据需要选择孔径光阑是否可变。在可变选择中,有可变光栏、固定光栏和可变系数三种选择如图8。可变光栏,是指在变焦过程中利用光栏孔径变化保持相对孔径不变,光栏变化系数由程序自动给出;固定光栏,是指在变焦过程中光栏大小保持不变,相对孔径变化;可变系数,是取前二者综合,给定可变系数使得光栏孔径变化同时使相对孔径也有变化。
4�;AQ12<[1 图8.调整系统孔径光阑变化设计窗体 ��m;{HlDez
rXM�c0SP�k 图8 是光栏在前固定组位置后一定距离时,分别是光栏可变、光栏不变以及给定光栏可变系数的三种情况。可见孔径光阑设置位置不同,系统外形尺寸,特别镜筒直径明显不同。
��se2Y:�v� 图9.孔径光阑不同可变系数情况对比 p_&B��+
<z
'Rs�r*g�X# 以上说明孔径光阑可变与不可变或者指定变化系数是对系统外形尺寸的影响。对于不同选择会影响系统在不同倍率条件下系统像面照度的变化。这时的变化对于轴上点和轴外点都是同时变化的。在图8中还有渐晕系数选择项,是指利用系统不同位置栏光形成系统渐晕时,给定不同渐晕系数也可改变系统外形尺寸,如图9。此时只影响轴外点通光照度,不影响轴上点相对孔径值,确保像面中心点照度不变。如图10所示。
9{�j`eAUZl 图10.孔径光阑给定渐晕系数窗体界面
�pL�;e(lM� 图3-147 孔径光阑有无渐晕的情况对比 MD<x{7O12>
3�%GsTq�2o 通常情况下,系统变焦组多利用典型的物象交换原则实现变焦移动,补偿组多采用自动换根方式计算运动曲线方程。在进行外形尺寸计算之前,可以有物象交换原则与非物象交换原则以及自动换根与不换根的不同选择。
oA~�0"}eS 图11.自动换根及物象交换原则选择功能界面 HK<S|6B�7V
�MaY�_�*�[ 在选择是否“物象交换”的下拉式菜单内可提供两种选择。当选择到物象交换时,界面上会自动出现调整非物象交换非对称度的拉杆式调节指针,随意改变物象交换的非对称度,以满足不同要求。在改变不同非对称度的同时,界面会及时显示系统变化示意图。
E�#��8|�h( 图12.物象交换原则选择功能界面 &g�23tT#P?
*���C+�[I� 在“自动换根”的功能下拉式菜单里可提供自动换根、不换根以及线性运动等三种选择。选择线性运动后变焦系统的变焦组和补偿组同时按直线运动规律运动,不使用凸轮曲线可大大简化系统结构,但同时会产生像面位移补偿的缺憾,只有在变焦比较小或对像面补偿要求不高的系统采用。
6|f8DX%3V� KA{Q��GaZ/ 图13.自动换根及线性运动选择功能界面 p!=8�Pq��.
-=�8f*�K[W ② 初级
像差系数自动平衡
8J$�1N*J| 完成外形尺寸计算后就可以接着进行系统初级像差的平衡
优化设计。此时按“下一步”命令钮,窗体立即出现下一个画面如图14。其中列出两个表格,一个是要求输入各初级像差系数的目标值,另一个要求输入系统各组元的PW参数的初始参考值及其权系数。参加优化设计的初级像差项目可选,选择时使用工具条上插入和删除按钮进行操作。以上数据输入完毕,按动工具条上确定按钮,计算立即完成,幷显示在下面文本框内。如图15。
L� x�IKH
G 图14.填写初级像差系数
���biS[GyQ 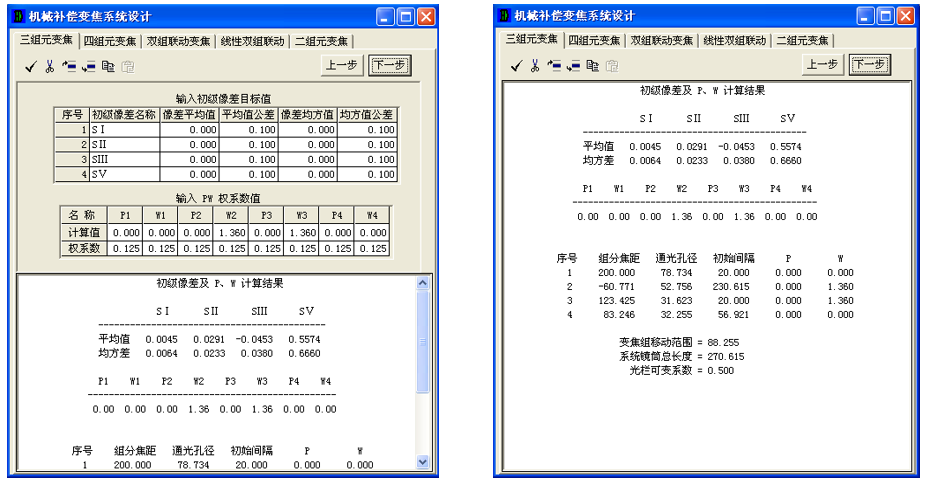
图15.PW自动优化结果 id� ��:
^|
cl&?'`
��) 系统实际像差平衡,最终完成机械补偿式变焦系统的
光学设计。此时在设计窗体内给出了全部设计结果,其中包括系统各组分的焦距分配、通光孔径、组分间隔、对各组分的PW值要求以及变焦组的总移动范围等。根据这些数据不难利用本程序薄透镜设计方法求出三组元连续变焦系统初始结构参数。



