-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2025-02-21
- 在线时间1734小时
-
-
访问TA的空间加好友用道具

|
ud���ld[f.
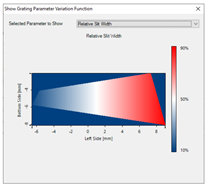
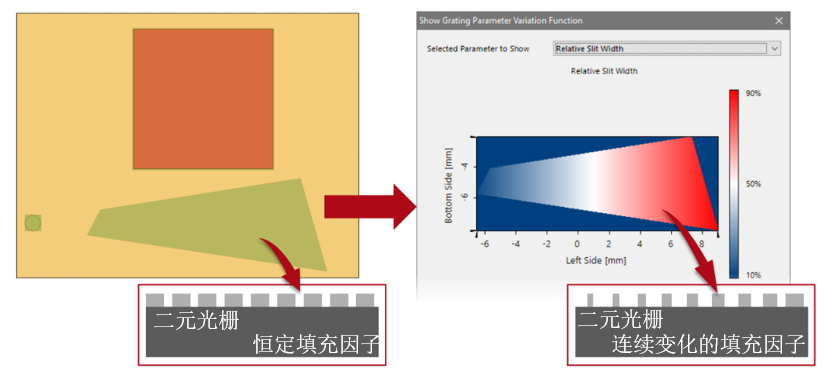
为了控制用于 AR/MR 应用的光导设备的均匀性和效率,有必要在某些区域,例如 在扩展和输出耦合光栅区域,引入变化的光栅参数,例如填充因子或光栅高度值。 [��U��W%(N
为此,VirtualLab Fusion 能够在一个区域内引入平滑变化的光栅参数,其中可以以非常不同的方式配置所需的变化。 这还包括一个工具,用于研究针对特定入射条件和光栅参数提供的衍射效率。 这个例子解释了如何应用这些工具。 "{1SDbwmMo
4I�q-4IG(
 d�f'�xx)kW KeIk9T13�O 2. 建模任务的说明 "&@v[O)!xu d�f'�xx)kW KeIk9T13�O 2. 建模任务的说明 "&@v[O)!xu
(*�X��Sr�Q 在光导上引入连续调制的光栅参数(例如,填充因子)。 }B��R@vY'd
E�\GD hfTQ
 ruf�*-&Kr7 4�!3mS�WNV 3. 带有附加引导的常规工作流程 Z:�e|���~# 3P&K�<M#�\ 起点是一个现有的、可执行的光导系统,它具有基本的几何配置(所需的距离和定位的光栅区域)和光栅规格(方向、周期、阶数)。 R,
J(]ew�� �=Y��-ZI� ruf�*-&Kr7 4�!3mS�WNV 3. 带有附加引导的常规工作流程 Z:�e|���~# 3P&K�<M#�\ 起点是一个现有的、可执行的光导系统,它具有基本的几何配置(所需的距离和定位的光栅区域)和光栅规格(方向、周期、阶数)。 R,
J(]ew�� �=Y��-ZI�
5P��CMxjon 需要参数调制的区域必须使用真实的光栅结构进行配置。 kZfUwF:yN� '��x{E#4A�
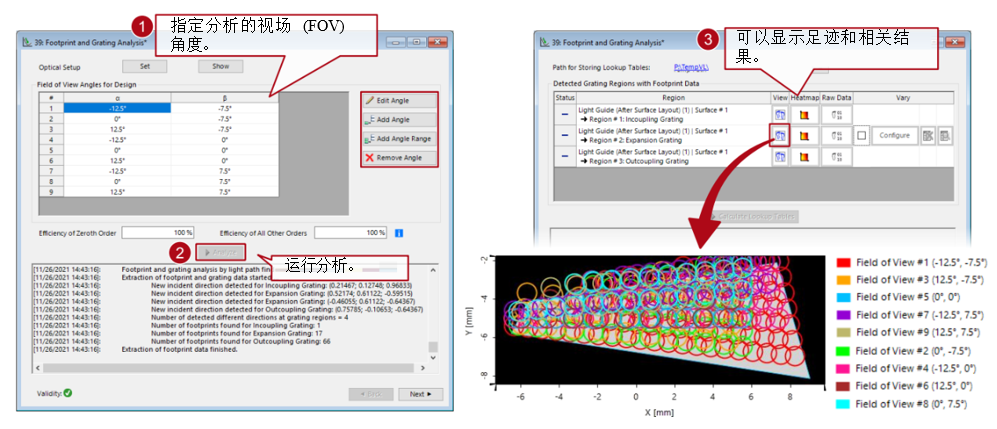
W���u\szI" 足迹和光栅分析工具用于指定光栅参数变化的所需范围,在光栅相互作用的指定条件下严格计算相应的瑞利系数,并生成可以定义实际参数变化的光学设置 . ��d9�E'4Zm x9l�G$0k:V
HA�HLF�+k� 注意:光栅调制是为单个光栅区域定义的。 E7�c!�K�J2
Z~WUI�Lx,� 4. 打开足迹和光栅分析工具并设置光学装置 %�YhM?j�MW
.w@o%A��O_
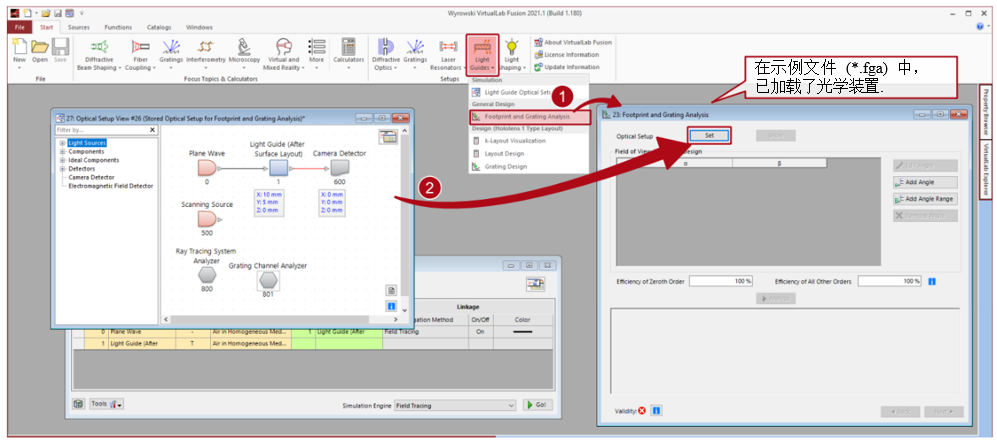 %^){)#�6w� R{X@@t9��@ 5. 足迹和光栅分析工具 <���q �d�M %^){)#�6w� R{X@@t9��@ 5. 足迹和光栅分析工具 <���q �d�M
e�X1<zzd��
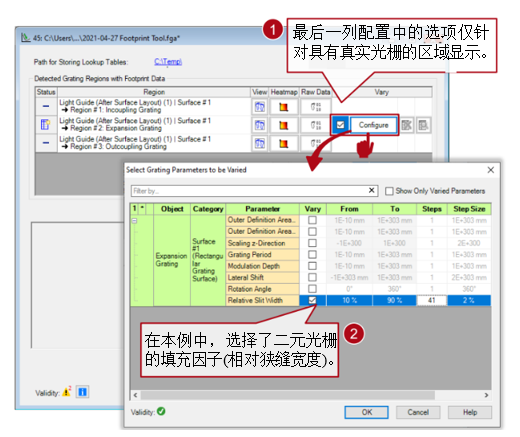
 �BPH-g�\�q L)�!9+!PKD 6. 光栅参数和相关范围的选择 F(5�(cr 7K �BPH-g�\�q L)�!9+!PKD 6. 光栅参数和相关范围的选择 F(5�(cr 7K
�`6�2iW3y
\A� �?B{�*
• 可以同时改变一个或两个光栅参数。 MD��62ObK!
• 参数空间的采样可以相对粗略,因为随后将在计算点之间应用插值技术。 k��M>Bk��\
• 该表列出了光栅的所有可用参数。 对于在一个区域内引入调制光栅参数,不允许使用改变光路的参数(如周期等)。 �]'%Z�&1 w
T*'?;��u��
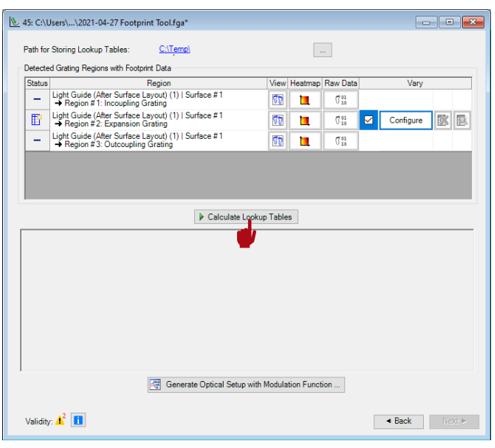
 �[*j�vvkAp 7:�cm�BkXm 7. 查找表的计算 �E��/Ng� � q7���!��$- �[*j�vvkAp 7:�cm�BkXm 7. 查找表的计算 �E��/Ng� � q7���!��$-
在配置所需的光栅参数变化后,可以通过单击计算查找表来计算生成的光栅特性并将其存储在查找表中。 7w�_cKR�1;
._$tNG�I�4
 6(F�kc�C$G 6(F�kc�C$G
{�~lVe GBp
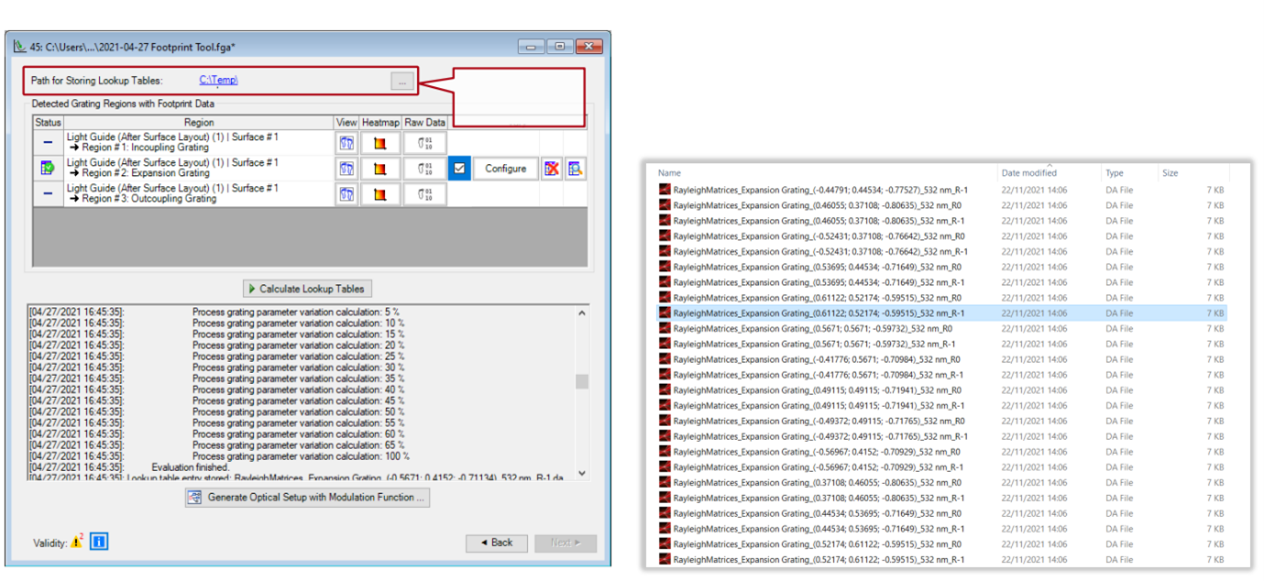
查找表是针对在足迹和光栅分析工具的第一步中确定的光栅参数和 FOV 模式的定义变化计算的。 查找表会自动保存到指定文件夹: 2�VY.#9�vl
x�9Nc�I�a9
 Z��W�VN�(U Z��W�VN�(U
OZ'=Xtb��n
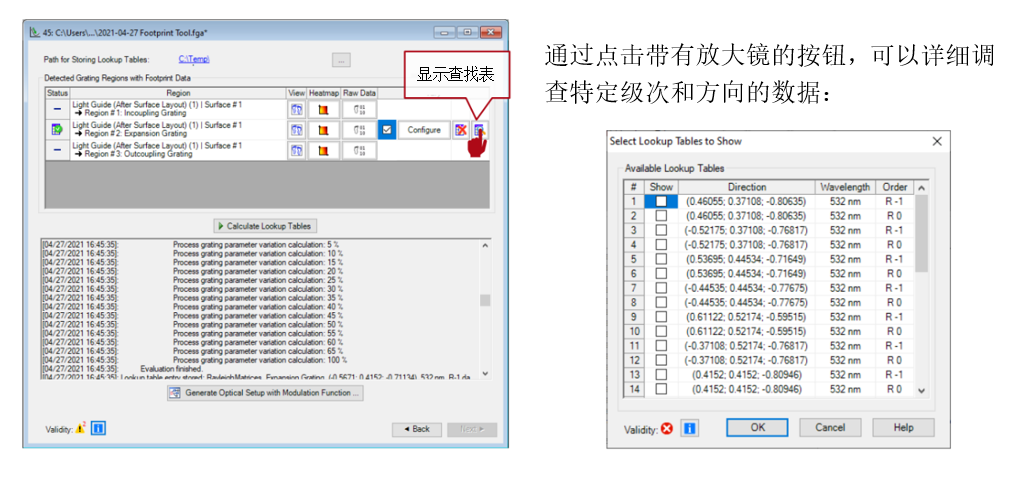 ��
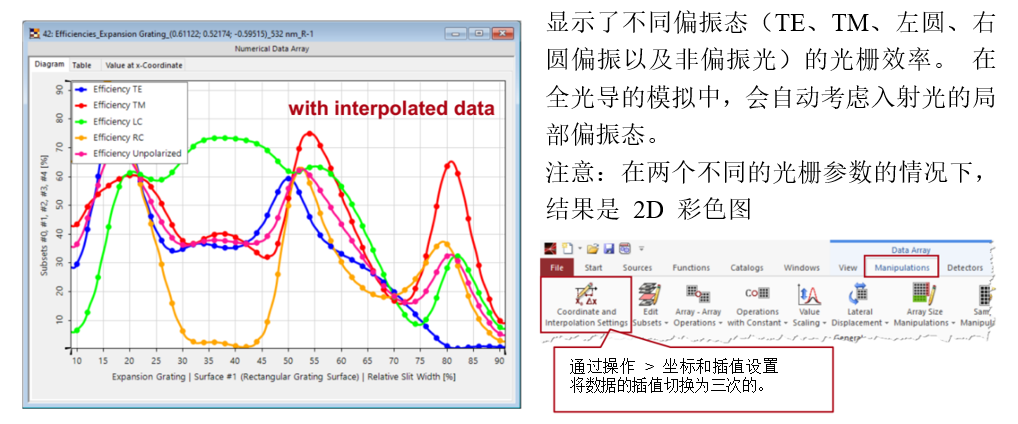
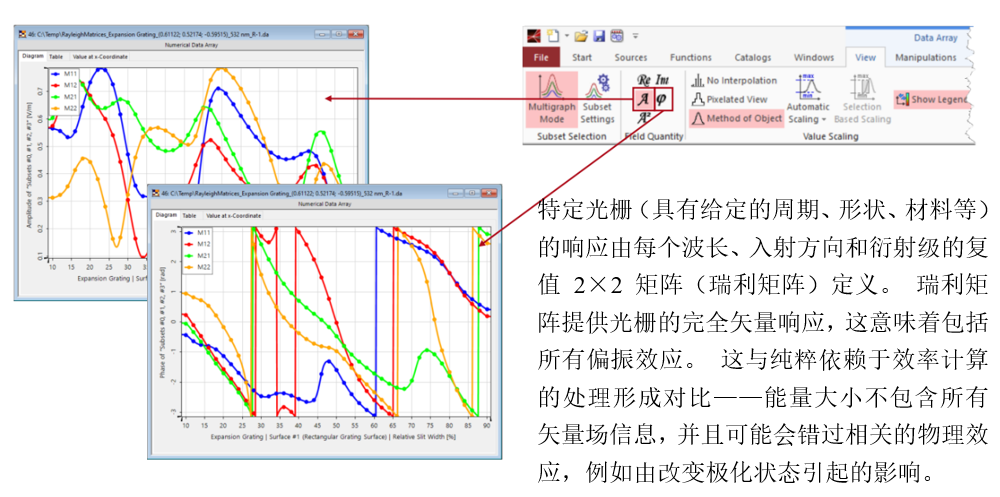
�Q9!T@� S�BNeN�]�� 8. 光栅性能的研究 Km=dI��d7] qVp�V Z�H! ��
�Q9!T@� S�BNeN�]�� 8. 光栅性能的研究 Km=dI��d7] qVp�V Z�H! 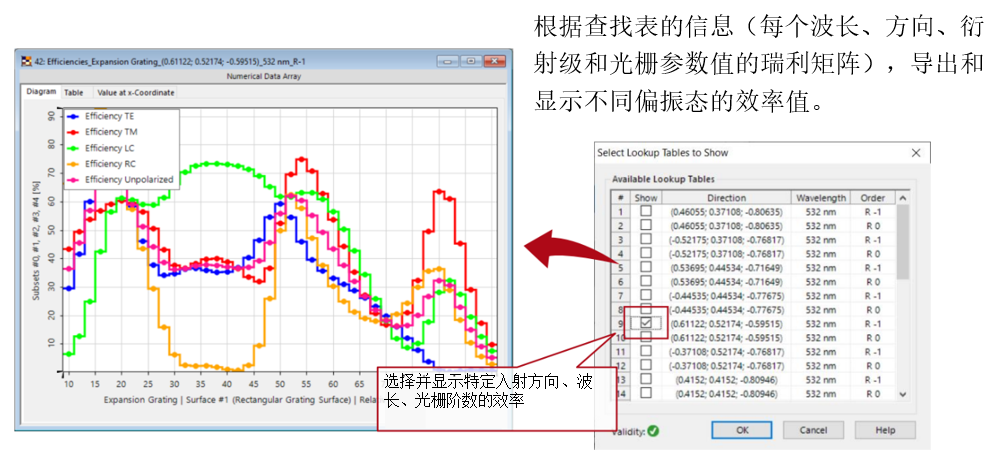 U�UuB Rtau U�UuB Rtau
 GW[g!6�6^ �u�q~���Z� 9. 从查找表加载瑞利矩阵 YV�p�sf�8R �ioZ{��2kK
GW[g!6�6^ �u�q~���Z� 9. 从查找表加载瑞利矩阵 YV�p�sf�8R �ioZ{��2kK 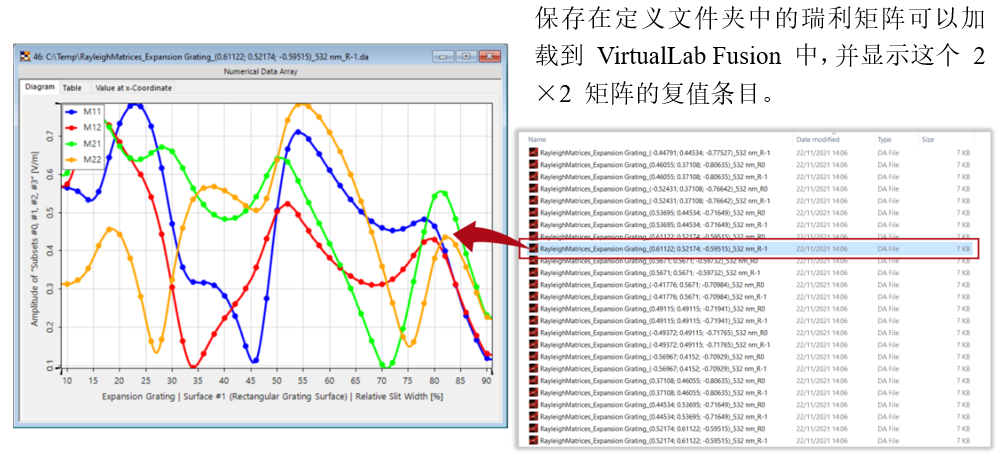 s��_j�� ?L s��_j�� ?L
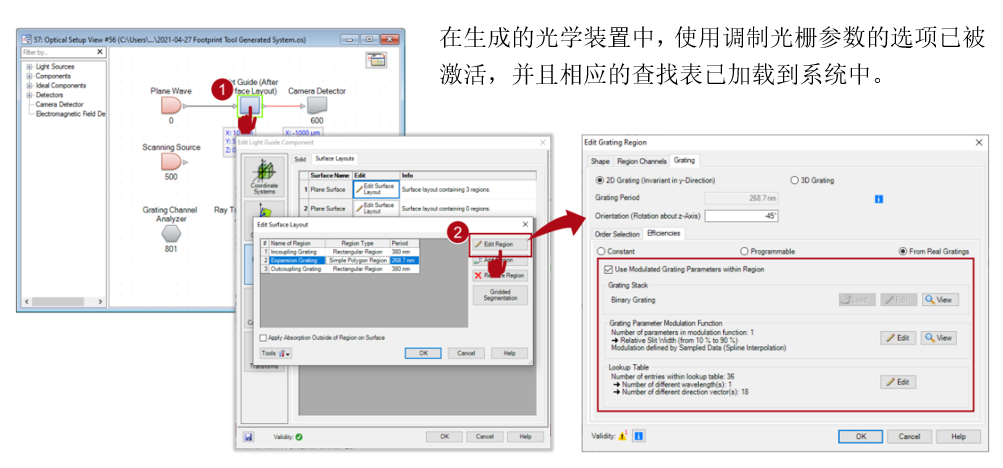
 "%�~Jb� dx �Kpx(x0^�2 10. 更新光学系统的产生 ?m��RG�F�S J2ry�Ydo>� "%�~Jb� dx �Kpx(x0^�2 10. 更新光学系统的产生 ?m��RG�F�S J2ry�Ydo>� 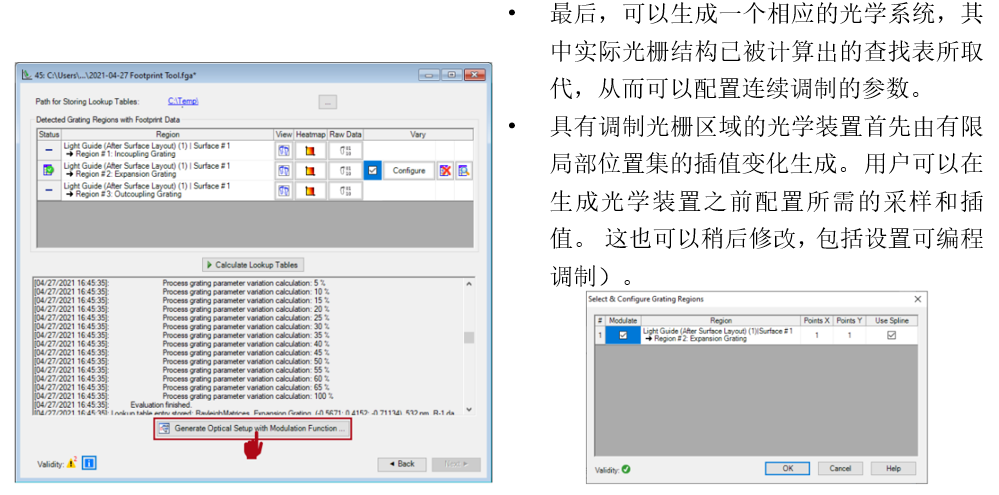 +5>*$L%8T` *G6Py,- !f +5>*$L%8T` *G6Py,- !f
 ��f2abee� 11. 光栅调制配置 l4:�5�(�1� 2^\6�7@9� ��f2abee� 11. 光栅调制配置 l4:�5�(�1� 2^\6�7@9� 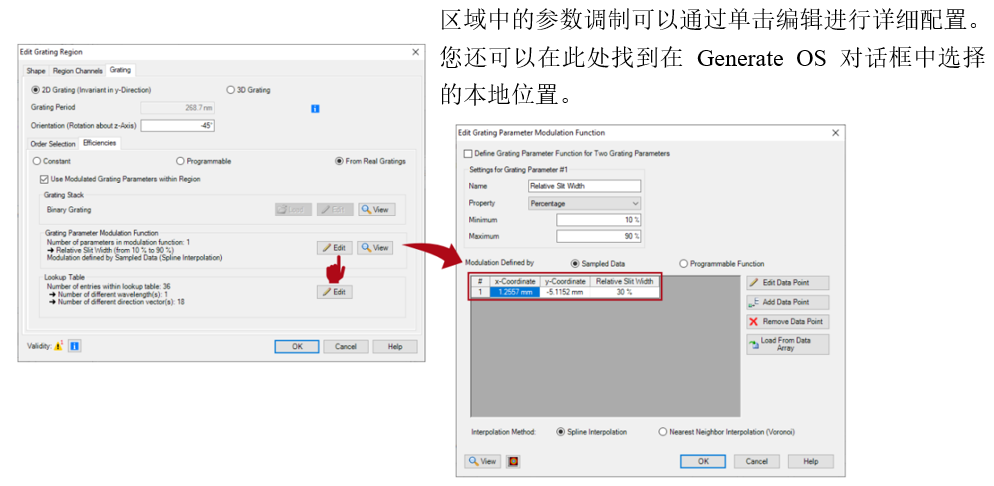 �Z�Yi."^l� �Z�Yi."^l�
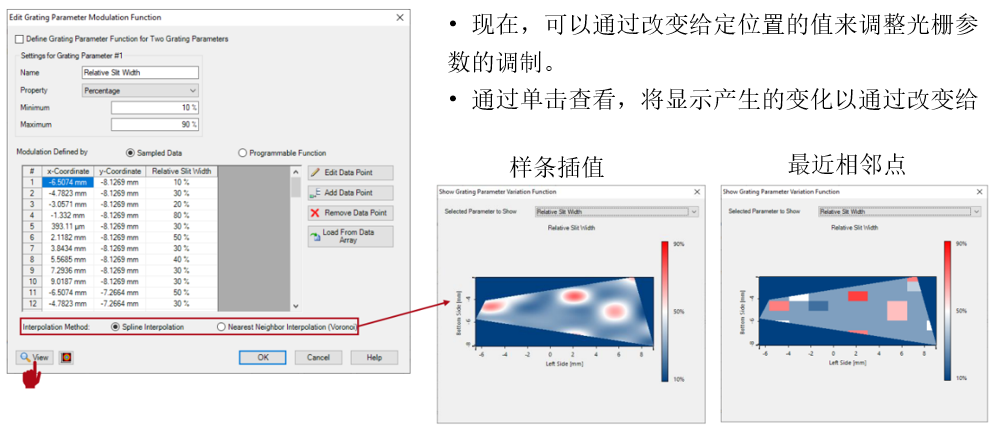
��tE~OWjL 12. 基于采样位置或网格的调制 R'�#1|eWCa p#yq��'kY� 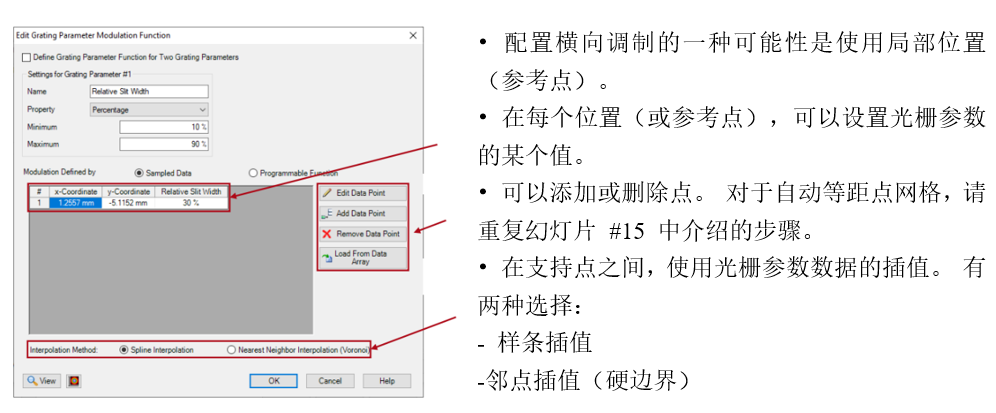 sFvu@Wm'7W sFvu@Wm'7W
PU"C('��AP
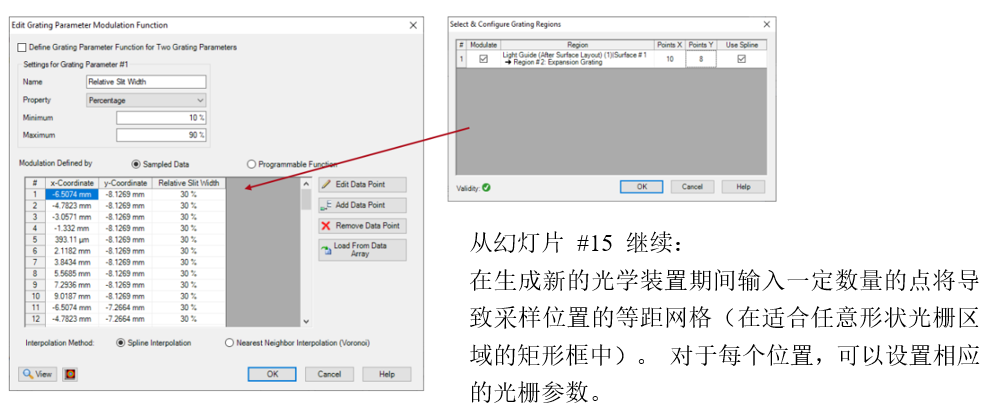 R;6$lO8C&� R;6$lO8C&�
D �(>,�#F
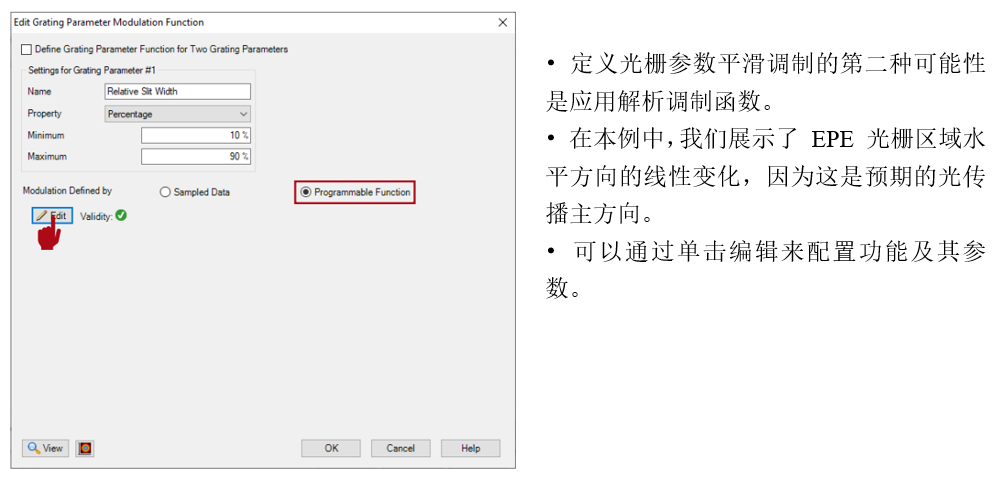
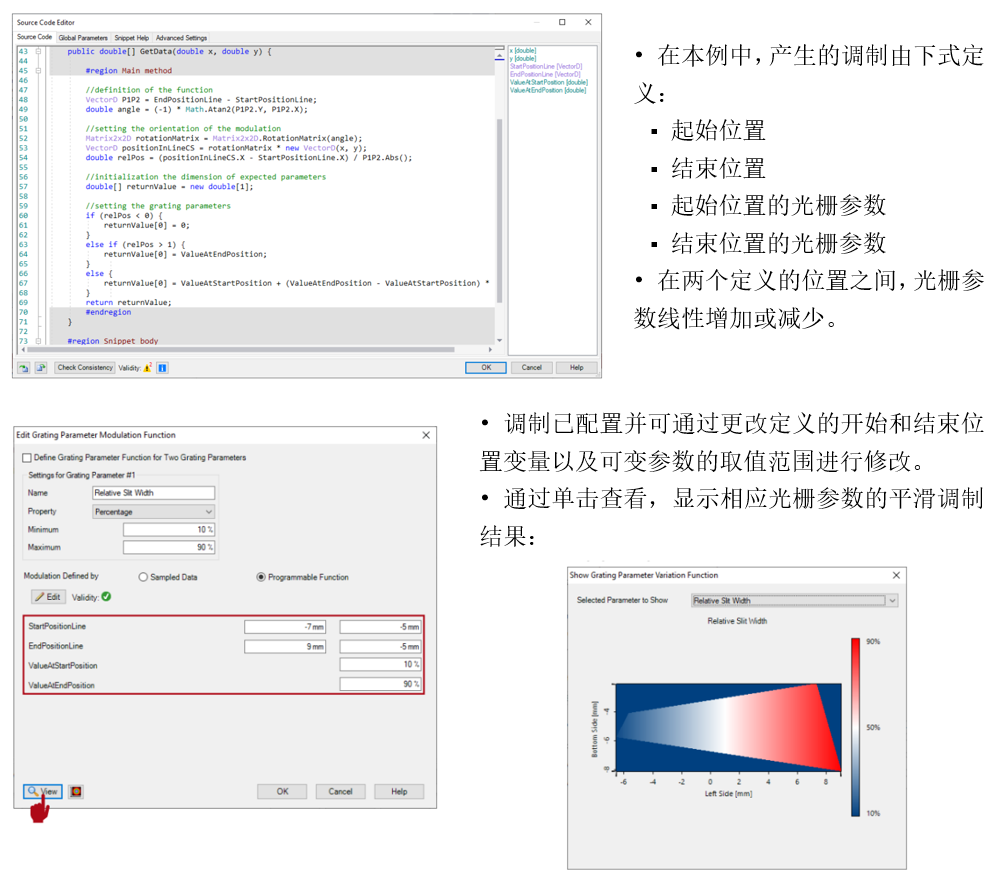
 |6�ZH�+6[� WaaF;|�,( 13. 基于解析描述的调制 R�[%Zy�Q�_ |6�ZH�+6[� WaaF;|�,( 13. 基于解析描述的调制 R�[%Zy�Q�_
49gm=XPm�
 lHT�W �e'� zn=I�fz)#| 14. 基于数学描述的调制 jIzkI)WC�| 7j��ZE(|G- lHT�W �e'� zn=I�fz)#| 14. 基于数学描述的调制 jIzkI)WC�| 7j��ZE(|G- 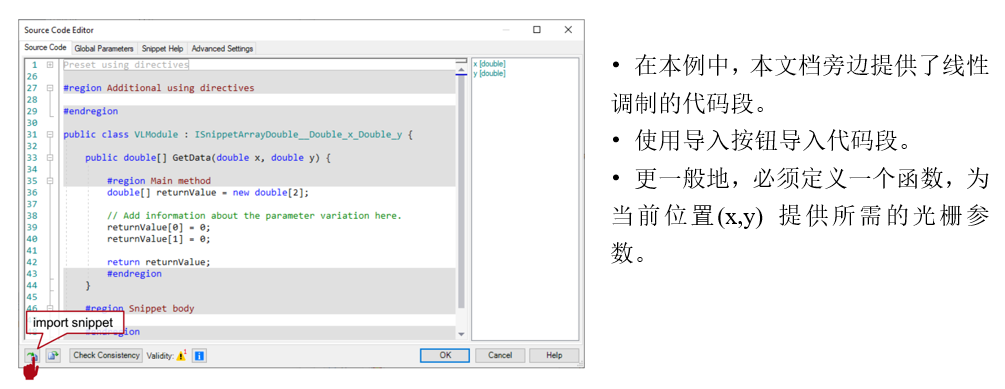 u@�"nVHgMJ u@�"nVHgMJ
 &"h 9Awn2� O>h,u[�0�� &"h 9Awn2� O>h,u[�0��
|



