-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2024-11-22
- 在线时间1530小时
-
-
访问TA的空间加好友用道具

|
�v��Ua�&9Y
应用示例简述 �G6?+Qz��r
F7r!zKX��Z 1. 系统详细内容 >P�D*�)Uq& 光源 �O�=C��z*j — 具有发散角的红外激光二极管 �@! g�J�Oy 组件 '@epi���F& — 折射准直系统并用非球面透镜进行聚焦 %G�k?�f�=e 探测器 ^3B&E�^R�� — 点列图 $B�3�<"�� — 波前差 (4WA�oye�| — 聚焦区域的1维和2维光场研究 `l�0�&�,]� — 光束参数 �yK #9)W�- 建模/设计 NW���t�`X! — 光线追迹:最初焦点位置检测 n�n0�`��A3 — 场追迹:包含衍射效应的高精度焦点研究 e���t$VR:�
8L�MO2Wyq� 2. 系统说明 6�zG��M[2� (�'u\rc2�R 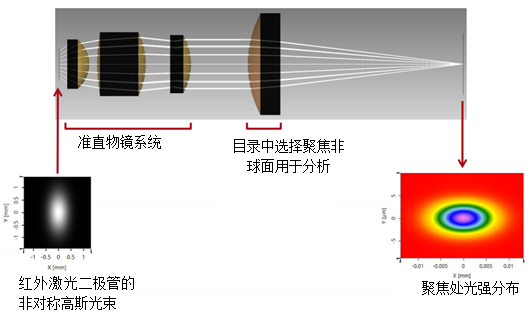 �GQP2-c�SZ �GQP2-c�SZ 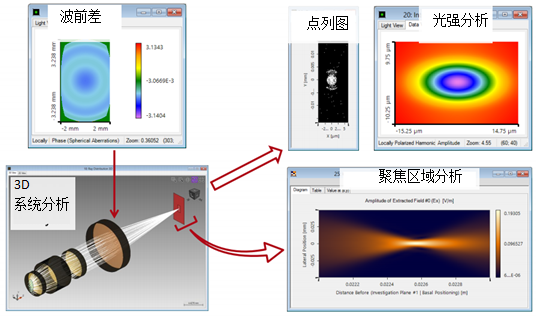 e/p�2| 4�; e/p�2| 4�;
Z"T#"FD�Ir 在该示例中,你可以受益于如下的功能: V���W[!%<� 一个非球面透镜的聚焦能力的分析 ��R�z��Os, 确定焦点位置,通过: �g2&%bNQ-5 — 焦点寻找工具 yi*2^??`
1 — 参数运行文件 d�V( "g]�, — 光束参数探测器 ky^p\d�Mh� 得到不同的信息/演示结果,如 H:d@@����/ — 透镜像差 vl���"l��� — 光束质量:光斑尺寸/形状,M2值 007(k"=o�V — 不同的2D&3D图来说明聚焦改善 ey�~5D��Y7  �$@[`v0y�* K>�tubL�Yh 5. 总结 S�{q��c1qj �$@[`v0y�* K>�tubL�Yh 5. 总结 S�{q��c1qj
�zv^km�5by VirtualLab能够: W@vt�6�v� 利用场追迹,高精度的确定焦点位置 �I�Yo{eX~= 位置可通过一下两步来确定: o<Esh;;*nm — 通过光线追迹快速寻找焦点 OD�bE���L/ — 利用场追迹对焦点进行高精度研究 ��kT��jx.� 94>�EA/+Ek �gtV^6��(Y 应用示例详细内容 �w6RB��|^
7j
]d{lD� 系统参数 V?.')?�'V�
#%;QcD�XRe 1. 应用实例的内容 �VDyQv^=�#
�s��?�:&�# BDS.0001,BDS.0002以及BDS.0003主要关于一个折射型光束传输系统。 oV(�|51(�f 在该示例中是阐述了对一个非球面目录中透镜聚焦区域的研究 h���2��b,( 在BDS.0003 一个双胶合透镜用于光束聚焦。 R-~Zv�Vw7L 8%@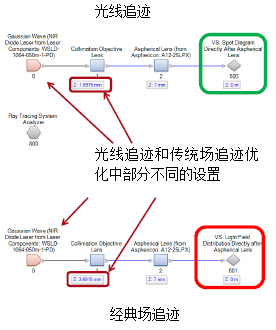 l"{1v��~I� 17
�k9h?s* 2. 通过光线追迹寻找焦点位置 �j�$�<�sq� l"{1v��~I� 17
�k9h?s* 2. 通过光线追迹寻找焦点位置 �j�$�<�sq�
�SU,�#:s(�
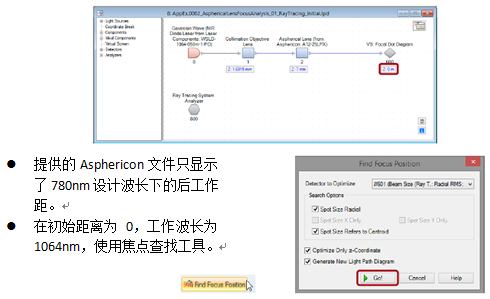 *N�C9S,eSP |#>:�@{X< 3. 光线追迹:优化工作距离 e�T�eZ^�G ep$C�
nBwE LA��83�7�P *N�C9S,eSP |#>:�@{X< 3. 光线追迹:优化工作距离 e�T�eZ^�G ep$C�
nBwE LA��83�7�P
4. BFL=22.60mm的3D光线追迹分析 �DL t�"cAW
__3�s3�Y�G E�.'v,GYe� 5. 光线追迹:径向均方根直径评价 \��[>���Ob
t1Zc�r#b�>
5}+�&Em":�
在后工作距为22.56mm处的光线追迹得到最小径向均方根直径。 Cwh*�AK�q(
:�j)v=�qul
在此距离下计算的径向均方根直径为5.55um RC�L��}�bE
:pp@x*uNP�
下一步,将利用经典场追迹设置进行评估。 pGs�k[.�� xk#q�_�!(j 6. 场追迹:详细分析 ��vGX}zzto
js$L<^��7 场追迹仿真可对光场参数进行评估。 v��>[�U*�E 例如 BM
vG����w 我们查看光强和位相值。 mnG\qsKNLK 我们应用光束参数探测器用以更详细的研究光束。 � UZV\�]�Y NKSK+�ll�2 对聚焦点研究最重要的是,场追迹可以分析衍射效应。 F%]Z��yO�9 #B^A"?�*S 通过分析假定焦平面附近不同z位置的光场,我们可以观察聚焦光线的改善,并将光线追迹仿真结果与场追迹仿真结果进行对比。 cm'�`��u&S , ��S���
} 7. 光束半径vs. 距透镜距离 �q�;)+O#CR TdCC,/c�3� 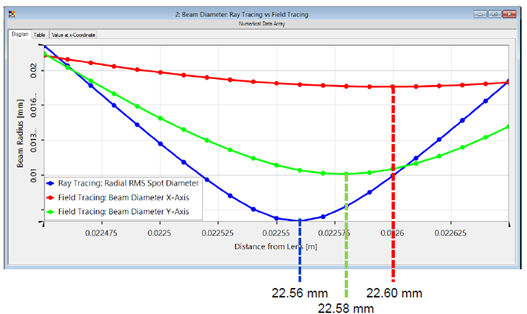 &��>x�d6-� &��>x�d6-�
�Z�w`�9��B
�F�cz}Gs4�
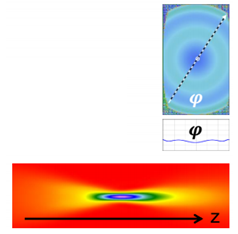
VirtualLab可以直接研究非球面透镜后的位相,并忽略预期的球形位相值。 �$!ATj`}kb
因此,仅保留剩余位相调制。 .�XV�W2ISv
其并不代表透镜的像差。其是准直入射光所带来的残留最小像差。 vT&)
5n�N %�aB��
RL6 9. 距离22.60mm处聚焦点光强 k� vQ]
}`a
�+W�7#G `> %0��gcNk"= 10. 聚焦区域内1维场评估 #$�^vP/"$
�&Rp��/y%9 }<9IH%s�gF 11. 其他VirtualLab 功能 0DB8[#i%: 在该示例中,你可以受益于如下功能: �\,ko'4�8@ 一个非球面透镜的聚焦能力的分析 Bs!F� |�x( 确定焦点位置,通过: 9�s�I&&Jg� — 焦点寻找工具 �,8`�CsY^1 — 参数运行文件 �&<>N�P?j} — 光束参数探测器 nkxv,_�)ZT 得到不同的信息/演示结果,如 g.���w�Dg — 透镜像差 ~u�bcD6�f� — 光束质量:点尺寸/形状,M2值 #1z/rUh`Cr — 不同的2D&3D图说明聚焦改善。 (rE.ft�5$9
J/(^Z?/~P!
 S%p�.|��!� Dfs�Pg'�:z 12. 总结 ��Sp�]u5\� VirtualLab能够: v�(`9�+��* 利用场追迹,高精度的确定焦点位置 ��ng6".�u9 位置确定可通过两步: 579<[[6~d2 — 通过光线追迹快速焦点寻找。 !K�%8tr4�� — 利用场追迹高精度焦点研究。 gy*c$[NS$� !SP��u9:� S%p�.|��!� Dfs�Pg'�:z 12. 总结 ��Sp�]u5\� VirtualLab能够: v�(`9�+��* 利用场追迹,高精度的确定焦点位置 ��ng6".�u9 位置确定可通过两步: 579<[[6~d2 — 通过光线追迹快速焦点寻找。 !K�%8tr4�� — 利用场追迹高精度焦点研究。 gy*c$[NS$� !SP��u9:�
|



