-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2024-12-27
- 在线时间1617小时
-
-
访问TA的空间加好友用道具

|
摘 要:本文介绍了连续变焦光学系统的基本工作原理以及光学设计方法的全过程。其中包括变焦和补偿方案的选择、高斯光学各组元焦距分配、外形尺寸计算、初级像差平衡、PW求解、初始结构参数确定、系统实际像差自动平衡,直到凸轮曲线优化设计等。文章以图形和公式说理,用OCAD光学自动设计软件为工具,全面介绍三组元连续变焦系统的设计方法及过程。 关键词 变焦系统 机械补偿 像差平衡 凸轮优化设计 OCAD光学设计程序 Hi,t@�!��! 一、 连续变焦光学系统的基本工作原理 在日常生活或军事观察中有时会想在一定图象画面内了解较大范围的目标全貌,有时又需要在一个较小范围内观察目标图象的具体细节。从光学设计的角度说,就是要求一个光学系统在像高大小不变时,可以改变物面尺寸大小。由光学系统能量守衡定律,拉氏不变量 d@kc[WL�D^  _p}x�ZD\?, _p}x�ZD\?,  �1'KishHK= �1'KishHK=  c�CdX0@h�Y c�CdX0@h�Y  �:@�.� �;� �:@�.� �;� 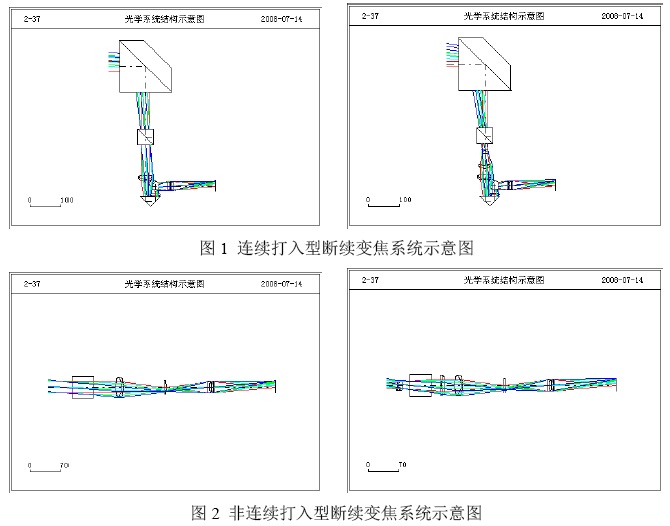 'fW��#�7W 'fW��#�7W  :BZ�0 �7`9 :BZ�0 �7`9
如果把一个变焦系统的可沿光轴方向移动的组分分成两组,各自按不同的运动规律移动的变焦系统被叫做机械补偿式连续变焦系统, FL�r�;�`3�  `rF�AZcEj% `rF�AZcEj% 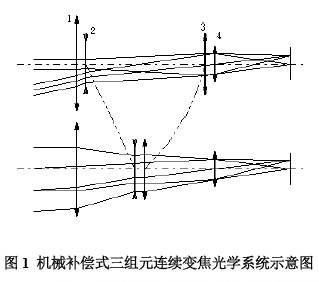 XB\zkf_}Xc XB\zkf_}Xc
对机械补偿式三组元连续变焦光学系统,必须满足以下要求 <[Oo*:A!7
1) 均匀改变焦距 系统变焦必须在规定范围内连续变化。系统焦距变化范围可以用系统的最小焦距值和最大焦距值,或者用给定最小焦距值和变焦比规定。 u?��0d[m�C
2) 系统的相对孔径基本保持不变 由于系统的相对孔径表征着像面的照度,为保证在变焦过程中像面照度不变,必须保持系统相对孔径稳定不变。变焦系统的孔径光栏一般设在后固定组的位置,因为孔径光栏在固定组上可以保证系统像面总照度维持不变。如果系统孔径光栏不在固定组上,必须要求该孔径光栏随系统变焦而随时调整光栏位置和大小,确保系统像面总照度维持不变。 �80hme+�e�
3) 变焦过程像面保持稳定 在变焦过程中像面保持稳定有两个含义,一是保持像面位置稳定,二是要求随着系统焦距的变化系统像面尺寸保持稳定。 �F]=B'�Z�I
4) 成像质量符合要求 连续变焦系统和定焦距系统对成像质量的要求不同,不仅要求某个变焦位置的成像质量最佳,还要求所有各变焦位置的成像质量稳定一致。 z'M�S�#6|} 1.2 变焦组在变焦过程中的像面位移分析 F:T GsV�#
机械补偿式三组元连续变焦光学系统中,变焦组在变焦过程中由于其物象共轭距离的变化不断产生像面位移。变焦组在变焦过程中沿光轴方向可以是匀速直线运动,也可以任意曲线方程规律作非匀速运动。图2给出了正组变焦组在变焦过程中匀速直线运动时产生像面位移的光学系统示意图,图中用虚线 %u!X�zdG�� r/r:o�X��K 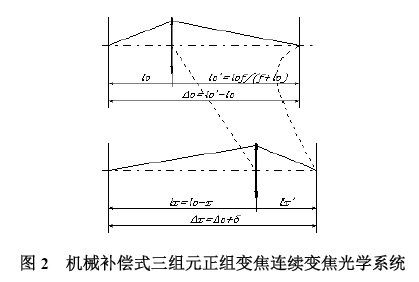 >mm�'��-�P >mm�'��-�P  移动到 移动到 处像面位移的曲线图。 zK5bO=�0j f`P9ku�#j} C�7�qYi�Sv 处像面位移的曲线图。 zK5bO=�0j f`P9ku�#j} C�7�qYi�Sv 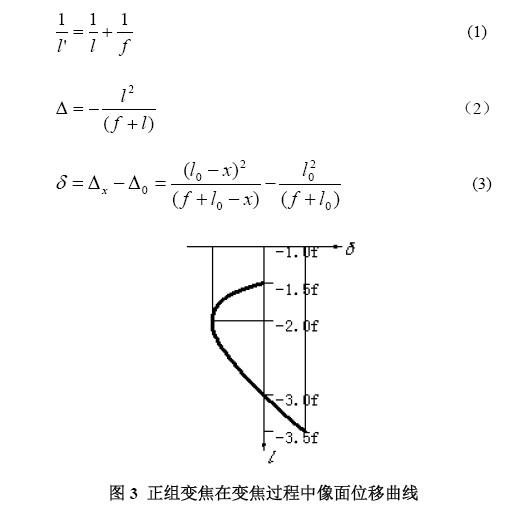 9f�+RAN(�
9f�+RAN(�  处变焦组放大率 处变焦组放大率 。变焦组放大率m和变焦比Γ随物距的变化成二次曲线关系。 _m'ys�CjA ;�A#~`��P Q:o�7G|�C� 。变焦组放大率m和变焦比Γ随物距的变化成二次曲线关系。 _m'ys�CjA ;�A#~`��P Q:o�7G|�C� 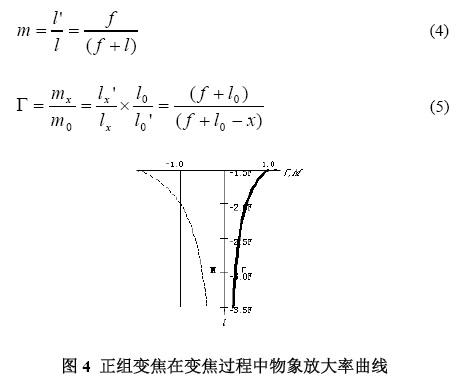 �:`W|h�E^� �:`W|h�E^� 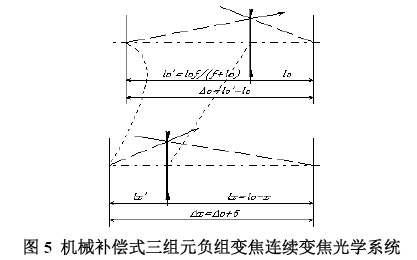 �!1��:@�8q �!1��:@�8q 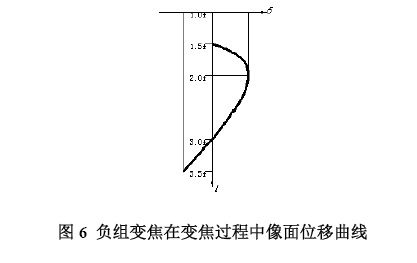 "4�� k�-dj "4�� k�-dj 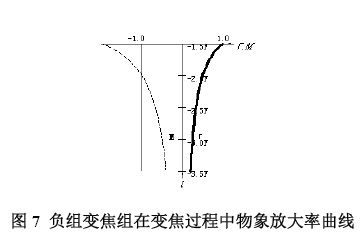 NP�J.+�ph� NP�J.+�ph�
1) 变焦组在变焦过程中,保持物面不动,变焦组缃对物面沿光轴方向移动改变系统总焦距。 {d!Y3+I%G�
2) 变焦组在变焦过程中,因其物距变化引起像面位移,像面位移量在物距l=-2f处有极值,像面位移曲线从极值点向两边延伸,并在l=-f和l=-∝处像面位移趋向无穷大。像面位移曲线在极值点前后变化速率不同。在极值点前(l=-f~-2f)速率较快,在极值点后(l=-2f~-∝)速率变化逐步缓慢。 );JJ2Jlk�d
3) 像面位移量的大小,在变焦组的焦距值不变的前提下仅和物面位置(物距)有关。 Yp�5�L+~J[
4) 像面位移曲线是个二次曲线,对应一个像面位移量有两个不同的物距值,由于这两个不同的物距有相同的像面位移量,或者说是有一个相同的共轭距离,通常把这一对物像点叫做物像交换点。 G\~^�&BAC�
5) 在像面位移的极值点,物象放大率等于-1(m=-1),物面在极值点和变焦组之间,物像放大率绝对值大于1(abs(m)>1),在l=-f处m=∝;物面位置在无穷远和像面位移极值点之间物像放大率绝对值小于1(abs(m)<1)。在l=∝处m=0。 a�G27�%(@� C1B'#F9EO 1.3 补偿组在变焦过程中的像面位移分析 n�9oR)&:�o
机械补偿式三组元连续变焦光学系统中的补偿组,在变焦过程中的作用就是以自身的物面位移量吻合变焦组的像面位移量,时刻保持系统像面位置稳定。也就是在保持补偿组的像面位置不变的前提下,轴向移动补偿组必然要求相应的物面位移,当补偿组的物面位移和变焦组的像面位移完全吻合时,变焦系统的像面保持稳定不变。机械补偿式三组元连续变焦光学系统补偿组在补偿过程中,为补偿变焦组产生的像面位移,均以非均匀变化的非匀速运动形式相对系统像面运动。图8所示为机械补偿式三组元正组补偿的补偿组相对系统像面在作匀速直线运动示意图。在图8中,补偿组相对系统像面变化,即随像距'l的变化为自变量。为此,有公式(6)、(7)、(8)和(9),并由此公式组绘出图形如图9和图10。 %a���8&W�� �
*4�y�N3y 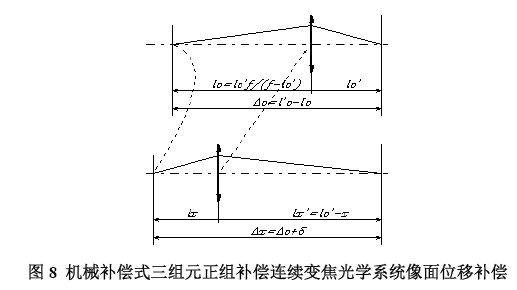 &8?�`< ��� &8?�`< ��� 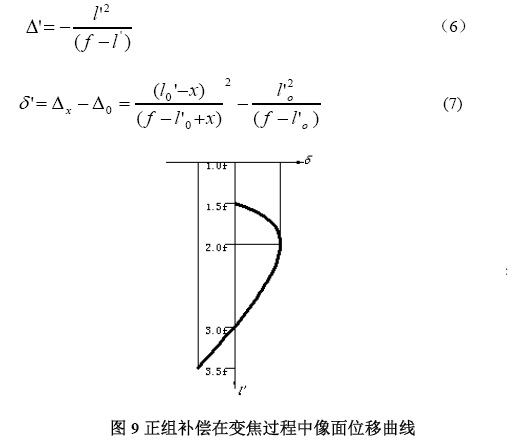 �X�A�D�3Z? �X�A�D�3Z? 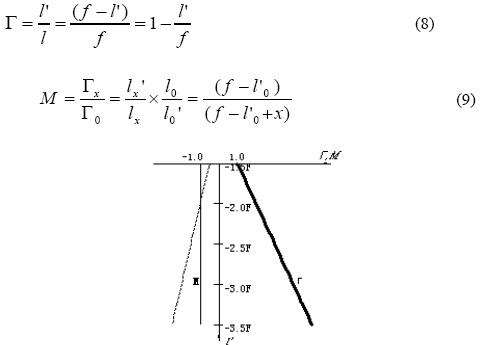 /1.�rz{wpb /1.�rz{wpb 图10 正组补偿在变焦过程中物象放大率曲线 �?2`$3[ET- 负组补偿的系统示意图及其相应曲线如图(11)、(12)和(13)。 ZK��dh%8C �JP�=Z�U�u >)c9�|e=8� 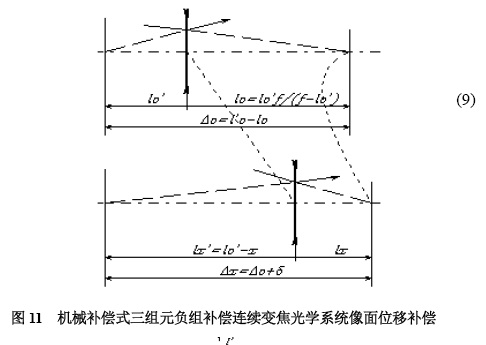 bkv/I{C>�? bkv/I{C>�?  S/�Oxr%H� S/�Oxr%H�
1) 补偿组在补偿过程中,补偿组沿光轴方向移动产生补偿组的像面位置变化以补偿变焦组的像面位移量,保持系统像面不动。 P6Xp<�^%E�
2) 补偿组在补偿过程中,让补偿组相对像面使像距变化产生物面位移。物面位移量在像距l‘=2f处有极值,物面位移曲线从极值点向两边延伸,并在l’=f和l’=∝处物面位移趋向无穷大。物面位移曲线在极值点前后变化速率不同。在极值点前(l’=f~2f)速率较快,在极值点后(l’=2f~∝)速率变化逐步缓慢。 ]VjLKF�b~U
3) 物面位移量的大小,在补偿组的焦距值不变的前提下仅和像距有关。 A�7�Y_HIo�
4) 物面位移曲线是个二次曲线,对应一个物面位移量有两个不同的像距值,由于这两个不同的像距位置有相同的物面位移量,或者说是有一个相同的共轭距离,通常把这一对物像点叫做物像交换点。 @�ss):FwA�
5) 补偿组的放大率m与像距l’之间成线性关系,当像面在l’=2f处补偿组放大率等于-1(m=-1),当像距在无穷远处,放大率为无穷远(m=∝),当像距l’=f时放大率等于零(m=0)。 1.4 变焦组与补偿组的搭配 机械补偿式三组元连续变焦系统的变焦部分是由变焦组和补偿组两个活动组分组成的。无论变焦组和补偿组各自都可以是正组分或是负组分,它们之间也有相互(正负)搭配问题。由以上分析可以看出,正组—正组搭配或负组—负组搭配是由于其变焦组的像面位移曲线形状和补偿组的物面位移曲线形状走势相反,难以选择物像交换及补偿曲线换根的原则,使得变焦速度偏慢,而正组—负组搭配和负组—正组搭配方式,其变焦组的像面位移和补偿组的物面位移曲线走势刚好相同,容易选择物像交换原则及补偿组曲线换根。实际上补偿组和变焦组没有严格分工,都可以负担系统变焦比,不仅使得系统变焦速度快,而且系统像差容易平衡。本文重点分析正组—负组搭配和负组—正组搭配两种形式。 1) 正组—负组搭配 采用正组变焦负组补偿的结构形式就是通常所称的负组补偿结构形式,如图14。该结构形式的特点在于其变焦组的物面在前,必须使用负光焦度的前固定组,这样系统变焦部分的总焦距也必然是负值,为了保证总焦距值为正值,在系统后部还必须使用正光焦度的后固定组,而且后固定组的负担也很重。负组补偿系统在变焦过程总焦距由长焦向短焦方向发展。 �
�WL-�0(� ^gg��!�Me� 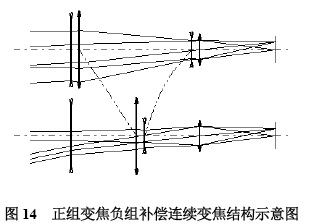 p�\D� >z(" p�\D� >z("
采用负组变焦正组补偿的结构形式叫正组补偿结构形式,如图15。由于正组补偿变焦系统使用正光焦度的前固定组,整个变焦部分的光焦度为正值,全系统可以不用后固定组。不过通常还是需要使用后固定组用以调整系统总焦距和工作距离,平衡系统像差。正组补偿系统在变焦过程总焦距由短焦向长焦方向发展。 rs�xRk7�s@ 8��h�B.fau 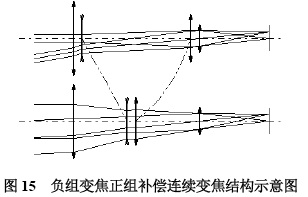 <GfV����MD <GfV����MD
变焦组是变焦系统完成变焦功能的主要组成部分,是变焦部分的主动方。正由于变焦组在变焦过程中产生系统像面位移,因此选择哪一段作为变焦范围,选择变焦组在变焦过程中的运动速度,是选择变焦组的主要依据。 Y5%;p33uFG
当变焦组在变焦起点位置和终点位置时的物距和像距刚好相互交换,该变焦组被称为物像交换原则的变焦组,此时变焦组产生的像面位移量最小,而且在两端的位移量等于零。由于像面位移量最小,当然给补偿组的负担也最小,整个系统结构紧凑,易于像差平衡。对于非物像交换原则的变焦组,虽然不具备最小像面位移优点,由图4可以看出当变焦组物距l在abs(l)<2f范围内变焦速度最快,因此在abs(l)=2f附近,偏向abs(l)<2f一方选择变焦组活动范围有利于提高变焦速度。 *��cNk�>y�
1.6 补偿组运动曲线的拟合 W����~dE�
补偿组在机械补偿式三组元连续变焦光学系统中的首要作用就是用自己的轴向移动过程中产生的物面位移全过程的补偿变焦组在变焦过程中产生的像面位移量。但由于变焦组和补偿组各自的光焦度和各自的移动范围不同,他们各自产生的像(物)面位移的量和曲线规律都不同,不可能自然补偿。要在系统全过程内精确补偿,必须人为改变补偿组的运动规律(运动曲线)影响补偿组的物面位移曲线形状弥合变焦组的像面位移曲线。这就是补偿组运动曲线的拟合。关于补偿组运动曲线的拟合方法的专门论述一直是近数十年来不断的话题。在参考文献[2]和[3]中都有比较深刻地分析。概括起来,可以说补偿组为了补偿系统像面位移,唯一的办法就是把自己的运动规律相对变焦组由线性同步运动改为非线性的非同步运动,实质上就是改变自己的物面位移形状以拟合变焦组的像面位移曲线形状。通常补偿组的曲线拟合方式有以下几种原则和方式。 8�S>�>7z!U
1) 在物面位移的极值点位置一侧做单方向运动 �K51�fC4'{
这种方法往往适用于变焦组非物像交换原则的小变焦比的变焦系统。 hyu��}}�0:
2) 以物面位移的极值点位置为转折点往复运动方式 如图16补偿组往复运动的优点是补偿组运动范围小,系统结构紧凑,但从图4可以看出,补偿组在往复运动过程中,一段和变焦组作反向运动,另一段作同向运动。在做反向运动有利于变焦速度,而同向运动必然减缓变焦速度,使得变焦过程加长,降低变焦效果。 n�;OHH{E{� L@A9{,9P�l 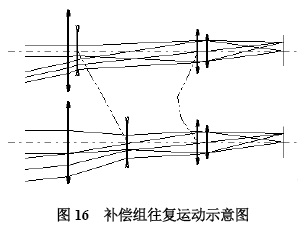 �MS�Y��N�1 �MS�Y��N�1  ��?�( 12aU ��?�( 12aU  Oz>io�\P94 Oz>io�\P94  �>hb-�5x�C �>hb-�5x�C
3) 在物面位移的极值点位置处换根继续原方向运动 补偿曲线的换根连续单方向运动如图14和图15,是推动连续变焦系统设计的重大发展[3]。也就是要求变焦组和补偿组共同在一个位置具备放大率为1的条件,或者说两条曲线都在极值点会合,让补偿曲线平稳过渡继续单方向运动,此时补偿组终点位置和起点位置的放大率互为倒数,即 f�sI`DjKi)  A-��0�m8�< A-��0�m8�< 表达式(9)变为 �_85���E=
 cx:jUsb��6 cx:jUsb��6
系统的变焦比由变焦组和补偿组共同承担,变焦组和补偿组也就没有了明确的分工。 "m��>};.lj
4) 改变变焦组运动规律改善补偿组补偿环境 补偿组用来补偿变焦组形成的像面位移的能力也是有限的,特别对于一些大变焦比系统,如果其变焦组与补偿组的匹配方案不是很合理的情况下更显突出。为了缓解补偿组的补偿压力,有时也不得不求助于变焦组的努力。这就是改变变焦组运动规律改善补偿组补偿环境的方案。比如同一个变焦系统,在改变成曲线运动规律后的变焦组和补偿组的运动曲线如图17,他在改变了运动规律后凸轮曲线的陡度如图18。由此可以清晰看出,改变前凸轮曲线最大陡度可达70°之多,造成凸轮运动卡死,简直无法使用,而把变焦组的运动规律略加修改就可把凸轮曲线的最大陡度改善到30°以内,明显提高了变焦系统的运动性能。 �Xz* tbW#� 9|a)sb��7/ 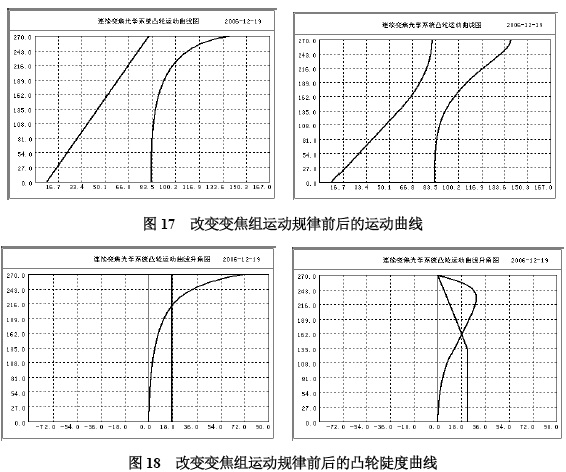 V8v,jS$l4� V8v,jS$l4�
三组元连续变焦系统是可变间隔的机械补偿式连续变焦光学系统的一个最有代表意义的结构形式,其中按物像交换原则正组变焦负组补偿以及负组变焦正组补偿更是其中最具典型的结构形式。在三组元机械补偿式连续变焦系统设计过程中一旦设计方案确定之后紧接着就开始进行高斯光学的外形尺寸的计算。高斯光学外形尺寸计算的任务是进行系统中各组分光焦度的具体分配和近轴光线几何尺寸的计算以便完成初级像差的设计。 h@�Dw'��w 2.1 外形尺寸自动计算 �1�gAc,�s2
在进行变焦系统高斯光学外形尺寸计算时会因变焦方案的不同而有区别。利用物像交换原则和不用物像交换原则不同,使用补偿组曲线求解时换根和不换根不同,正组补偿和负组补偿的具体计算方法也会不同。此外,就是一个变焦和补偿方案,因对系统的具体要求不同其计算方法也会有所不同,比如有些系统需要根据前固定组的要求进行设计,有的系统要根据后固定组的数据及后工作距离的要求进行设计。为满足这些要求,在可以自动进行变焦系统自动设计的OCAD光学设计程序中,就可满足对正组补偿和负组补偿变焦系统的选择要求,可以满足根据前固定组求解和根据后固定组求解的不同选择的要求。 g��T�D%4�V Y�iNo#M91� vGyppm�[0� 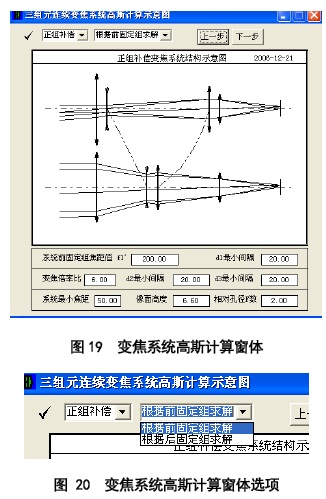 [Ekgft&��� [Ekgft&���  auoA������ auoA������ 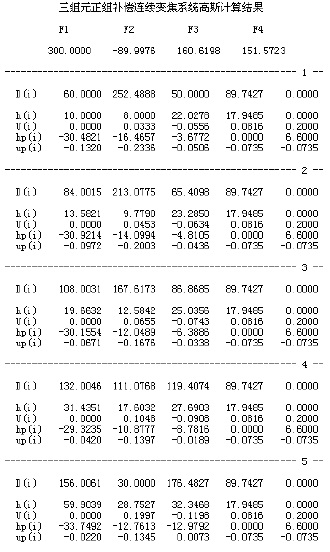 �o�HRbAE^� �o�HRbAE^� 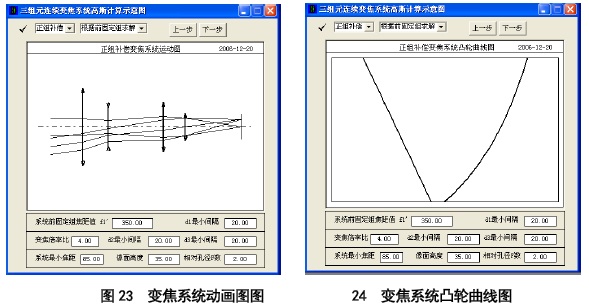 M�Hn&;
A] M�Hn&;
A]
前面求出了满足像面补偿以及焦距变化范围等要求的焦距分配,接着便要考虑校正像差的问题。由于变焦系统比较复杂,应把校正系统像差的工作分成两个阶段进行,也就是首先考虑系统初级像差的校正,然后再考虑初级像差和高级像差的平衡。当然这两个阶段也不能截然分割开来,比如在校正初级像差时还必须要考虑系统可能产生的高级像差预留一部分初级像差等待和高级像差平衡。 连续变焦系统和定焦距系统的关键不同还在于,定焦距系统的所有镜片和透镜组的结构参数在使用中都是固定不变的,而连续变焦系统的各个固定组和活动组之间间隔会在变焦过程中不断变化,其像差关系也在不断变化。因此,对变焦系统不仅要考虑像差的最佳性同时还要考虑其像差的稳定性。为了满足变焦系统最佳性和稳定性的要求,为简化对系统像差的要求,可以把整个变焦过程的所有像差集合起来求其平均值和其均方差表达像差的最佳性和稳定性指标。此外,在考虑系统初级像差的校正时要选取两个中间参数P、W值(通常简称PW值)作为求解系统结构参数的必要参数。因此求解PW值的过程就是根据校正初级像差求解系统结构参数的过程。在校正初级像差求解PW值的过程中,可以把在变焦过程中所有各像差系数的加权平均值和均方差值(离散值)集合起来以它们为目标值构造评价函数,使用最小二乘法求解PW值。使用OCAD程序自动计算高斯光学外形尺寸后,接着使用“下一步”按钮,就可以根据对系统初级像差系数的要求再加上对各组分PW值的权系数自动计算出各组分的PW值如图25。表2列出的数据是图25中数据的列表。由计算窗体上可以看出,在填写初级像差系数时,要求填写各像差系数的平均值和离散值及其公差内容。对各种初级像差系数的选择可以通过窗体上的工具条取舍,通常各组分的色差都有各组分单独消除,一般不需要自动平衡色差系数CⅠ和CⅡ。对像差系数平均值的要求可以控制系统的平均值,但不是最佳值,对其最佳值的控制用其离散值的要求保证。 Y?e3B�x7*b u�TUa4�^]* 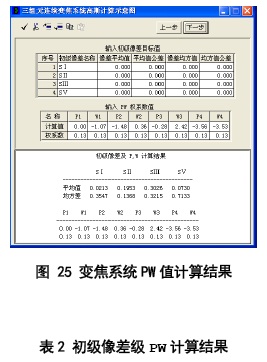 C�}bPv�+�t C�}bPv�+�t 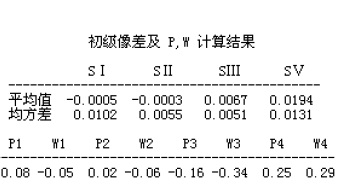 �EK�.c+Or, �EK�.c+Or,
求解完各组分的PW之后接着就可求解他们的初始结构参数,但也不是很轻松的事,因为根据系统不同复杂程度,简单的光学结构不可能很容易满足要求,往往需要进一步把系统结构复杂化,也就是把一个组分由一个简单的单透镜或双胶合透镜复杂化成多组透镜以分担他们的像差贡献。然后再把这样一个复杂的组分所应承担的PW值分解成各个单透镜或双胶合透镜的PW值,才便于具体设计系统的结构参数。系统的复杂化过程往往需要多次反复的人工过程。系统过分复杂会影响系统的结构尺寸和系统的生产成本,过分简单又满足不了系统的成像质量。各组分之间的复杂化程度不同也会影响系统各组分之间高级像差和初级像差的平衡,依然保证不了成像质量。 h�!~|�6nj
一般说来系统的复杂化过程就是把最原始的单透镜或双胶合透镜分成一组或多组的排列,比如可以把他们分配成单透镜——双胶合透镜组合、两个双胶合透镜组合、两个单透镜和一个双胶合透镜组合甚至还可能需要分解成更多的镜片的组合才能满足要求。具体复杂化方法在许多文献[2]上都有很具体的分析,可借鉴参考。无论把一个组分复杂化成什么程度,其最基本的单元都离不开单透镜或双胶合透镜。因此,初始结构的设计最终还是可以归纳为对单透镜和双胶合透镜的设计。把一个组分的PW值分解成各个单透镜或双胶合透镜后,很容易使用OCAD光学设计程序求解具体结构参数。在OCAD中有专门的自动求解双胶合透镜的工具菜单。在选择“薄透镜初始结构设计”菜单后,程序界面上会出现如图26窗体。 ��.Btv}��b Z%A<#%�� � 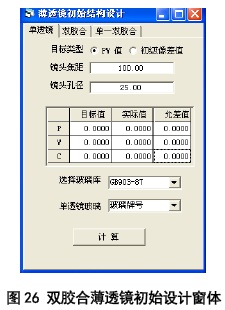 u�a�!��D-0 u�a�!��D-0 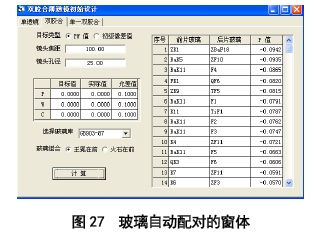 tUn&z?�7bF tUn&z?�7bF 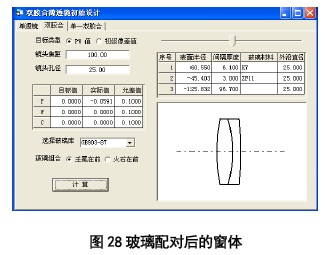 +-",2��d+g +-",2��d+g 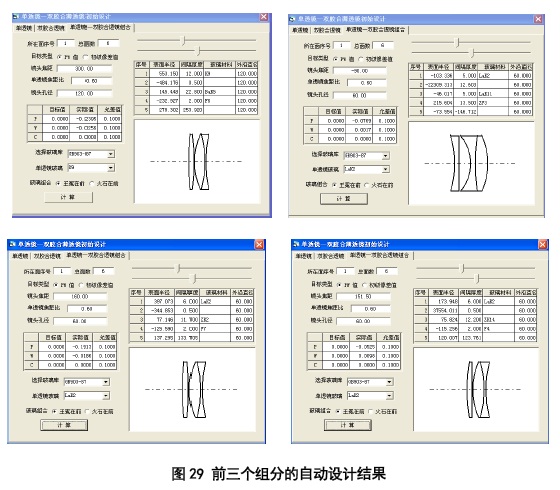 <w%D�yRFw3 <w%D�yRFw3 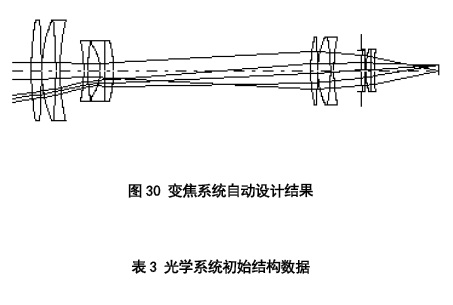 v3�!by��N^ v3�!by��N^  }v,�W-g��A }v,�W-g��A
连续变焦光学系统的像差平衡与定焦距系统的像差平衡有着完全不同的思路,其区别有如下几方面。 ��~c��9vdK
2) 对定焦距系统为改善成像质量,所有表面半径和间隔都可以作为变量处理,而对于连续变焦系统,首先必须保证所有各固定组和活动组的光焦度以及各组分间的主面间隔严格满足变焦系统的高斯光学关系不变,确保变焦参数和像面位置不变。 为满足变焦系统在像差平衡时保持其变焦高斯光学关系,首先必须把各组分的光焦度值作为目标值处理,此外在像差平衡过程中由于个作为自变量的表面半径和间隔的变化,必须随时调整各可变间隔的近轴间隔,满足变焦高斯光学的要求。 OCAD光学软件包在追迹系统光线时,不是靠输入的可变间隔数据,而是根据变焦方程随时计算出各变焦位置的可变间隔数据,然后再根据各组分的相应主面位置求解出相应间隔的表面间隔数据,确保各可变间隔的高斯关系不变。所以在使用OCAD建立连续变焦系统数据时,只需要填写变焦系统初始位置的各可变间隔数据以及变焦组的总移动量,即可随意计算任一变焦位置的结果,不必一一给定,这样既方便了光学计算又确保了各可变间隔的准确性。可变间隔的填写如图31。图中既有图例又有表格便于填写数据,只要填各表面间隔的对应序号及初始位置的表面间隔数据以及变焦组的总移动量即可。填写变焦位置数便于计算各不同变焦位置的计算结果,不必一一填写各不同变焦位置的表面间隔数据,该变焦位置数在使用中还可以随时修改满足计算需要。在填写初始位置的表面间隔有两种填法,一种是只填写高斯间隔,实际表面间隔由程序自动换算修改,另一种是填写实际表面间隔直接使用。 u�k`d,xF � Z�,(%��v.d 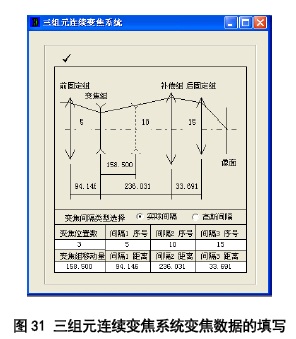 �C-_w]�2MM �C-_w]�2MM  / *O��u$�� / *O��u$��
4) 对定焦距系统仅由对系统像差的校正要求决定光栏位置,而对于连续变焦系统,不仅由对系统像差的校正要求决定光栏位置,还要考虑系统相对孔径(曝光速度)的稳定性决定光栏位置。一般情况下,变焦系统的光栏位置都放置在系统的后固定组内,如果确实需要放在活动组内,就必须考虑光栏的具体位置和大小要随变焦的变化而变化,以满足系统相对孔径的稳定性。 %�y!������
5) 定焦距系统有着固定不变的物方视场或像面高度,而对于连续变焦系统,物方视场应随系统焦距的变化相应改变,确保像面尺寸不变。 '�aL�PTVM^ e=Y�O.H�T� 3 凸轮曲线优化设计 ��AW](�"pt
为保证各活动组分在变焦过程中按设计要求移动以保证其表面间隔尺寸,一般都使用凸轮结构驱动各组分的运动。凸轮曲线优化设计应该分成两个步骤,首先应按照常规把变焦组的运动曲线设计成直线轨迹,根据补偿原理求出补偿组的运动曲线。对于一般小变焦比的系统应该就可以满足使用要求,但对于大变焦比系统或者选取变焦组像面位移曲线或补偿原理不合适的系统,可能出现补偿组运动曲线过陡现象,使得补偿组在运行过程中运动困难或卡滞甚至卡死的现象。为了缓解这一矛盾可进一步对补偿组运动曲线进行优化设计。运动曲线的陡度一方面和凸轮镜筒的直径和转动范围有关,另一方面还和变焦组的运动规律有关。一般情况下为简化工艺,习惯上都把变焦组曲线设计成直线,但如果是把变焦组的运动曲线修改成不同曲线会明显改善补偿组的曲线陡度。OCAD具备修改变焦组运动曲线改善补偿组运动陡度的功能。 +D�6��-��m 3.1 凸轮曲线的一般设计计算 ��t�=A�E7�
OCAD可以对三组元连续变焦系统进行凸轮优化设计,在输入三组元连续变焦光学系统的数据之后可从工具条的“设计”中选择“变焦系统凸轮优化设计” 菜单,界面上出现小窗体如图33。 k?z
[hZg�0 (0�O�`A~M3 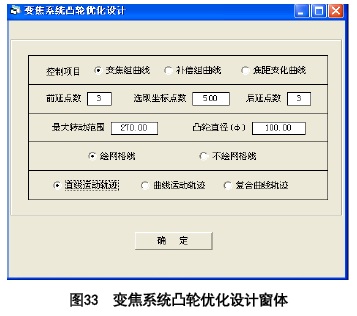 #wq��;^)> #wq��;^)> 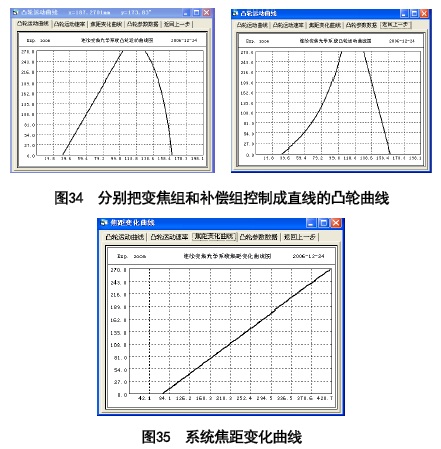 �^O��sd�/g �^O��sd�/g 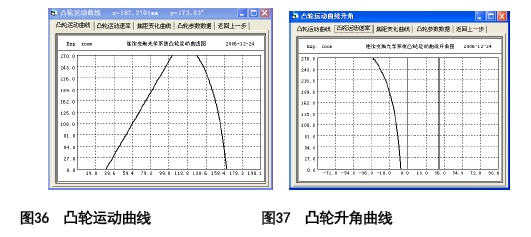 c4FO�fH�|� c4FO�fH�|�  >MBn2�(\B; >MBn2�(\B; 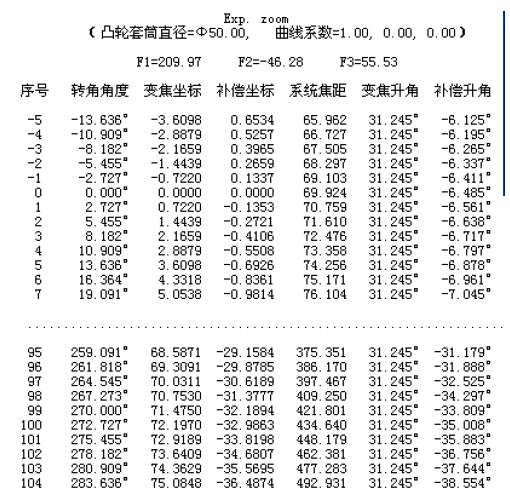 @#G�6�z�`, @#G�6�z�`,  9F�-�ViDI. 9F�-�ViDI. 3.2 凸轮曲线的优化设计计算 tr#)iZ\�� 按照以上常规方法设计,如果补偿组曲线过陡则会影响凸轮正常运转,因此还须对凸轮曲线作进一步优化设计。凸轮曲线优化设计的主要方法就是改变变焦组凸轮曲线,把变焦组的直线运动轨迹非线性化,即改成各种不同的曲线形状,适合补偿组要求,改善补偿组补偿环境,降低曲线陡度。 让变焦组运动曲线非线性化可以采取如下方法。 9`�h�pa-m@ b) 单纯曲线法 rPrEEW�S0) 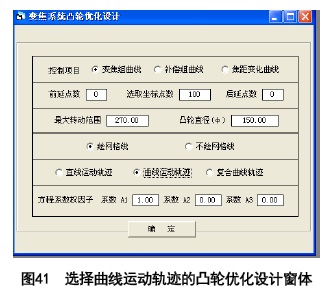 l�{B<�"+�8 l�{B<�"+�8  ,.�1&Ff�)S ,.�1&Ff�)S  /It.�>1~2@ /It.�>1~2@ 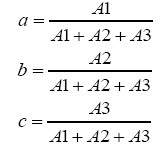 kM6
EZ`mj� kM6
EZ`mj� 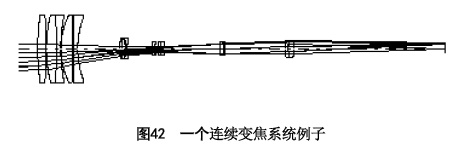 +c~O0�U1�� +c~O0�U1�� 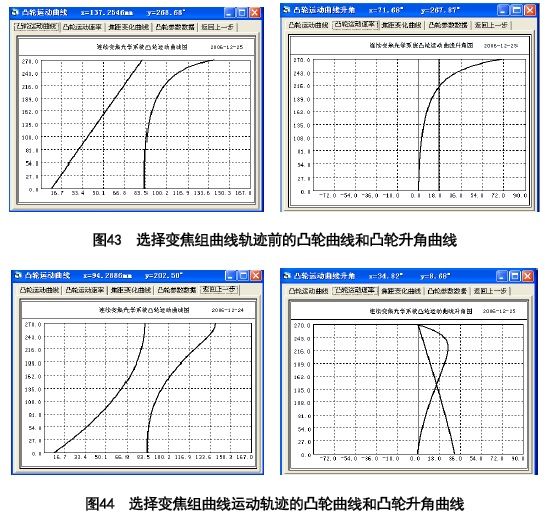 2-
�|����j 2-
�|����j
所谓复合曲线,就是把变焦组运动轨迹用两段曲线对接起来。由以上分析,变焦组像面位移曲线当物距在二倍焦距前后不是对称的,往往形成前后曲线斜率不等,仅仅把变焦组运动轨迹改成高次曲线虽然可以改善曲线的斜率,但又有可能把本来比较平缓的曲线部分变得较陡。使用复合曲线可以把原来比较平缓部分仍保持直线轨迹,只把原来较陡的部分改成高次曲线局部修正,效果会更好一些。 �Wb*�T���� 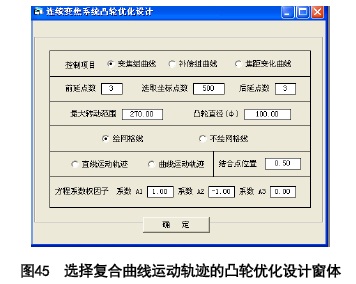 & �y 2GQJE & �y 2GQJE  *$*nY� [/5 *$*nY� [/5 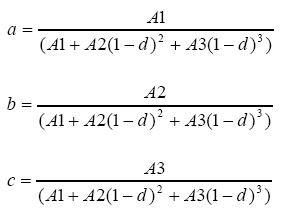 U)T�/.L{0i U)T�/.L{0i 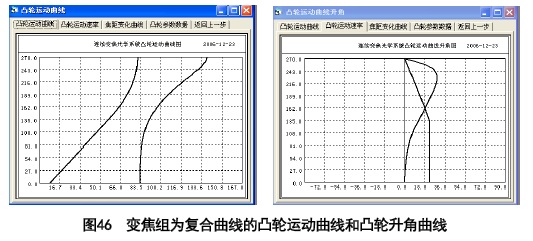 �b ���?=�� �b ���?=�� 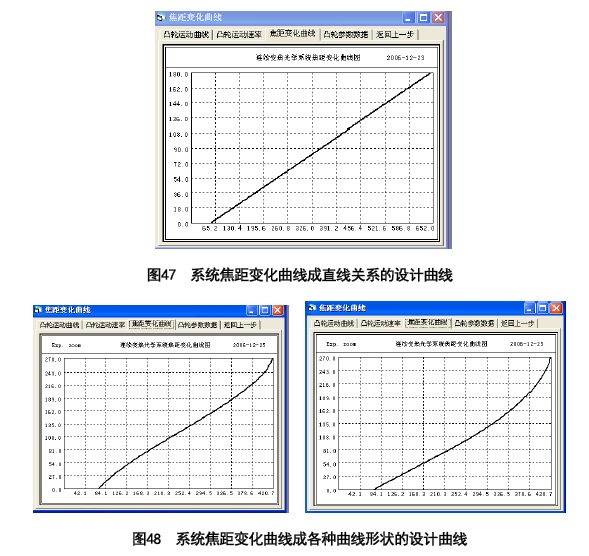 4�)c"�@�Zf 4�)c"�@�Zf
连续变焦光学系统的光学设计是个比较复杂的设计过程。本文在全面仔细的消化分析机械补偿式连续变焦光学系统的工作原理,在作了大量程序设计基础上用图形和公式说理,阐述了连续变焦系统特点,各种变焦和补偿的不同工作形式,各种典型结构的机理,变焦方案的选择以及具体的设计方法。设计方法涵盖了设计方案的高斯光学外形尺寸计算,初级像差设计与平衡,光学结构参数的确定与计算,实际像差平衡乃至凸轮曲线的设计与优化。在初级像差计算求解PW以及实际像差平衡中使用了像差的平均值及像差离散的理念有效简化了计算工作量并明显提高了变焦系统成像稳定性与最佳性的统一。本文在介绍变焦系统设计方法中介绍了可以自动进行三组元连续变焦系统全面优化的OCAD光学设计程序,为变焦系统自动设计提供了独特而有效的设计工具。 } SWA|x 参考文献 �"pKGUM���
[1] G.·.Back and Herbert Lowen ,“Journal of Optical Society of America”,1958,48,3,149-153。 ]����h`E4B
[2] 电影镜头设计组,电影摄影物镜光学设计,中国工业出版社,1971年。 k�[^}ld[��
[3] 陶纯堪,《变焦距光学系统设计》,国防工业出版社,1988年。 y�x`r;|ds}
[4] 姚多舜,光学自动设计双优选阻尼最小二乘法[J],光学学报1984年,第4卷,第6期。 8B% O%*5`�
[5] Todd .C. D. and Maxwell, Aberrational weight adjustment by tolerance based weighting in damped least squares optimization [J],SPIE,1996,2774:89-105. *N&^b�F"SF hVQ+
J�!qD
?���><� � QQ:2987619807 gE�]a*TOZk
|



