| fredoptimum | 2017-03-22 15:47 |
FRED案例-半径干涉测量技术的物理光学建模1. 简介 半径干涉测量通常通过简单的几何模型来模拟,即,来自物镜(或标准透镜)的光线形成锥形并且聚焦到一点[1]。当测试光学器件变小和/或需要更高的精度时,这个简单的几何模型就会产生问题并得到错误的半径测量值。需要完整的物理光学模型来捕获系统的衍射效应和像差。 半径干涉测量的原理图如图1所示。菲索或泰曼格林干涉仪都可用于半径测量。在菲索干涉仪中,标准透镜用作聚焦元件、分束和参考表面。在泰曼格林干涉仪中,使用分束器将光分成参考反射镜和物镜,它可以将光束聚焦到测试部件。 通过首先将部件放置在共焦位置,然后将部件移动到猫眼位置,并测量部件移动的距离,来测量测试部件的半径,该距离就是测试部件的半径。当泽尼克多项式[1]的离焦项为零时,共焦和猫眼位置重合。在视觉上,靶心环是空的。因为操作者不能将部件准确地放置在所需的位置,所以用于确定共焦和猫眼位置的最准确的方法是逐步通过这两个位置。当操作者以小步幅移动部件通过共焦和猫眼时,我们记录离焦和Z位置。然后,我们用一条线拟合离焦VS.Z位置。共焦和猫眼位置是Z位置轴上的截距。这种通过共焦和猫眼步进的方法可用于精确半径测量[2],我们在这里用于半径测量的模拟。 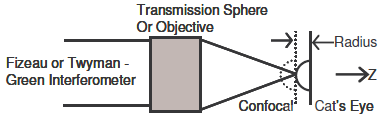 图1:半径干涉测量几何模型原理图 在NIST的精密半径干涉测量实验显示了标称24.466mm半径的Zerodur球的测量之间的差异。球体由坐标测量仪机械测量,同时在使用不同标准透镜的干涉仪上光学测量[2]。即使考虑了测量中的所有已知偏差和不确定性,这种在75nm至400nm范围内的差异仍然存在。对于这种差异的解释可能是光被假定遵循几何模型而不是更准确的物理光学模型,我们将在这里进行测试。 在光的几何模型中,当透镜的顶点与光的焦点(发生在距离聚焦元件一个焦距处)重合时,就会出现猫眼位置。然后,共焦位置距离猫眼位置一个半径。在非像差几何模型中,这发生在聚焦元件的波前的曲率等于测试部件的曲率时。 半径测量的高斯模型表明了当使用几何模型而不是更复杂的高斯模型时,半径测量中存在误差[3]。对于较小的半径部分(<1mm),这个误差是在105部件的量级,而对于较大的部件(25mm),有接近108部件的误差。当考虑具有半径像差的高斯模型时,NIST [2]的研究者发现了6nm的误差(107部件)。这些像差是由标准透镜和系统中的其他光学元件的缺陷引起的。 下一步是考虑物理光学模型。当然,焦点区域的分析计算是不可行的,因此需要近似。对于这种物理光学模型,我们使用来自Photon Engineering的软件包FRED [4]。 2. FRED模型 FRED通过将光源光束近似为点网格来近似物理光学模型,其中每个点发出高斯分布“子束”。 每个高斯子束以ABCD矩阵方法[5]传输通过光学系统。在每个子束通过系统之后,叠加“探测器”上子束的波前,以近似物理光学模型。FRED是一个可视化软件包,其中透镜、反射镜和光源都显示在它们的相对位置。FRED不执行几何分析。 为了模拟半径测量,我们首先插入每个元件(光源、聚焦透镜、测试部件和探测器)到FRED文件中。然后追迹来自光源的光线。光线由聚焦元件聚焦,从测试部分反射,再由聚焦元件准直,然后在探测器处读取。在探测器处的期望输出是波前的相位。我们按照所述步骤通过共焦和猫眼位置,并获得每个点的相位图。然后我们使用Matlab读取相位数据和Z位置,以确定共焦和猫眼的位置。半径是两个位置之间的差,半径误差是测试部件的输入半径和输出半径之间的差。 我们在模拟半径测量中使用了两个不同的光源。我们测试了在整个圆形孔径上具有恒定强度和相位的圆形孔径光束,这模拟了最佳实验装置。第二个光源是高斯强度光束,通过改变子束的强度,使得强度的叠加是高斯分布,来形成该高斯光束。光源波长为632.8nm(氦-氖),并设置为相干。子束的数量可以改变,并且影响测量的时间和输出相位。我们测试了不同孔径尺寸的光源,从直径为4mm的微干涉仪到直径为150mm的大尺度干涉仪。 我们测试了两种类型的聚焦元件。因为FRED使用实际光学器件而不是近轴近似,所以典型的透镜具有太多的附加的球差。因此,我们首先使用抛物面作为聚焦元件,接下来使用具有圆锥表面(以减少像差)的透镜作为聚焦元件。我们通过改变焦距来测试不同的数值孔径。 我们测试了一系列测试部件,半径从0.25mm到1mm,用于微干涉仪装置,半径25mm附近,用于宏观干涉仪。模拟探测器以像素划分,且可以改变。使用的像素越多,测量速度就越慢,并会影响相位输出。图4(a)示出了使用抛物面聚焦元件的示例测量。图4(b)是当部件位于猫眼附近时的波前相位图的图片。主要的误差是离焦,这表明部件并不完全在猫眼处。 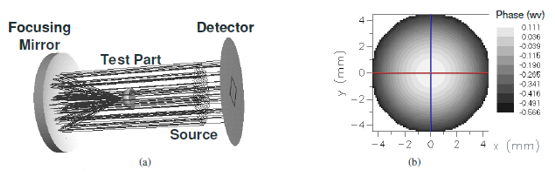 图4.(a)FRED中半径测量示意图(b)来自FRED波前相位示例 3. 结果 由于篇幅限制,此处仅显示了几个结果。该模型显示了半径、猫眼位置和共焦位置处的误差。也就是说,输出半径不等于输入半径,并且猫眼和共焦位置会有偏移。图5显示出对于改变NA和部件尺寸而没有附加的像差的微干涉仪的模型的结果。如图5(a)所示,误差随着的NA目标变小而增加,如预期的那样,因为焦点较大。此外,对于较大的部件,误差较小,如图5(b)所示。对于在f/3.2和25mm半径输入部件的宏观尺度干涉仪,误差为133nm,106中5个部件。这个误差量可以开始解释在NIST的实验中所显示的差异[2]。这些误差不存在任何像差。如果将典型的像差量添加到模型中,则预期误差将增加,这是我们的工作的下一环节。 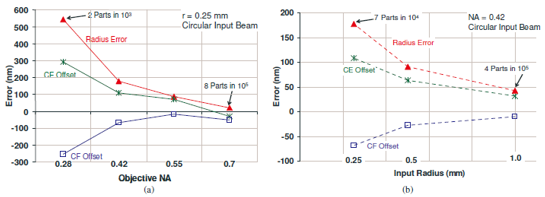 图5.使用几何模型而不是更加复杂的FRED模型的误差,数据来源于微干涉仪装置。 4. 讨论和总结 我们预测模型假设将会在焦点区域附近受到挑战,有时称为焦散。在焦散点附近,射线不垂直于波前,以及“相位偏移”[6],即使对于无像差波前也是如此。因此,波场的分析具有误差。最近的一篇出版物很好地总结了情况,“对在不同介质之间的弯曲界面处具有焦散的波场的分析仍然是一个重大挑战...我们不知道任何现有的基于光线的模型可以分析这种情况”[7]。弯曲界面是半径测量中的测试部件。为了解决这个问题,作者提出修改软件中的高斯子束源来解决这个问题。这种用于光学建模的方法显然不在本工作的范围内,而是在此介绍FRED中的误差并作为未来研究的方向。 我们进行了有限的不确定性分析。第一个不确定性是散焦对位置图拟合的不确定性,其由模型故障、解包算法中的误差、相机的像素特性和泽尼克拟合算法中的误差引起。由拟合引起的半径不确定性有波动,但对于大多数情况可以估计在±40nm。FRED模型中的另一个不确定性来源是选择输入光线子束的数量和相机中的像素数量。这些选择导致输出半径中的±31nm(光源)和±64nm(探测器器)的不确定性。我们使用简单的和的平方根法来组合这三个不确定性来源,以估计来自FRED模型的半径的不确定性为±81nm。因为这种不确定性很大,FRED不太可能用于校正在几何模型中没有考虑的高精度的偏差,但是我们仍然可以使用FRED寻找趋势。 我们指出,当使用简单几何模型而不是更复杂的物理光学模型时,在半径干涉测量中存在误差。该误差随着部件半径的减小和物镜NA的减小而增加。这个误差可能有助于解释一些实验结果中发现的差异。但是,物理光学模型的近似不是完美的,也具有不确定性。这种不确定性使得软件不可能用于校正测量中的偏差。该软件可用于显示由使用几何模型而不是物理光学模型引起的不确定性的大小。 5. 参考文献 [1] J. Breivenkamp and J.Bruning, “Phase Shifting Interferometry,” in Optical Shop Testing, D. Malacara, ed. (John Wiley and Sons, Inc., NY,1992), 501-598. [2] T.L. Schmitz, A.D. Davies, and C.J. Evans, “Uncertainties in interferometric measurements of radius of curvature,” in Optical Manufacturing and Testing IV, H.P. Stahl, Ed., Vol. 4451 of Proceedings of SPIE (SPIE, Bellingham, WA, 2001), 432-447. [3] K. M. Medicus, Improving Measurements Based on the Cat’s Eye Retro-Reflection, Diss., (UNC Charlotte, Charlotte, NC 2006). [4] Photon Engineering, 440 South Williams Blvd., Suite # 106 Tucson, Arizona 85711, 520-733-9557. [5] Jacques Arnaud, “Representation of Gaussian beams by complex rays,” Applied Optics, 24, 538-543, (1985). [6] G.W. Forbes and M.A. Alonso, “Using rays better. I. Theory for smoothly varying media,” JOSA, 18, 1132-1145, (2001). [7] G.W. Forbes and M.A. Alonso, “Using rays better. III. Theory for smoothly varying media,” JOSA, 18, 1357-1370, (2001). 文章来源:Medicus, Kate M., and A. Davies. "Physical Optics Modeling of the Interferometric Radius Measurement." Optical Fabrication and Testing2006 |
|