| xunjigd | 2016-11-13 21:47 |
VirtualLab运用:反射光束整形系统二极管激光光束使用无色散离轴反射装置进行准直和整形 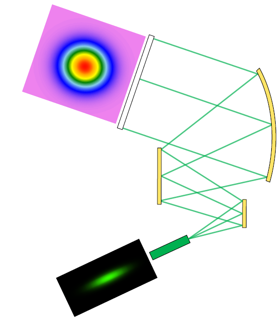 简述案例 系统详情 光源 - 强象散VIS激光二极管 元件 - 光束准直和整形的反射元件(例如圆柱抛物面镜) - 具有高斯振幅调制的光阑 探测器 - 光线可视化(3D显示) - 波前差探测 - 场分布和相位计算 - 光束参数(M2值,发散角) 模拟/设计 - 光线追迹(Ray Tracing:):基本系统预览和波前差计算 - 几何场追迹+和经典场追迹(Geometric Field Tracing Plus (GFT+) & Classic Field Tracing): 分析和优化整形光束质量 元件方向的蒙特卡洛公差分析 系统说明  模拟和设计结果   场(强度)分布 优化后   总结 实现和分析高性能离轴和无色散反射光束整形装置。 1.模拟 使用光线追迹验证反射光束整形装置。 2.评估 应用几何场追迹+(GFT +)引擎来计算场分布和评价光束参数。 3.优化 利用一个具有高斯形状孔径函数的光阑和经典场追迹引擎来优化M2参数。 4.分析 通过应用蒙特卡罗公差来分析方向偏差的影响。 对于复杂的光束整形装置,特别是离轴系统,可以使用VirtualLab来进行高效的模拟和分析。模拟过程中,根据情况应用不同的模拟引擎。 详述案例 系统参数 案例的内容和目标 在BDS.0001,BDS.0002,BDS.0003和BDS.0004案例中,研究了折射光束传输系统。  之后,研究并优化整形光束的质量。 另外,探讨了镜像位置和倾斜偏差的影响。 模拟任务:反射光束整形设置 引入的反射光束整形装置是基于一个反射镜系统,此系统由两个抛物面圆柱反射镜镜与抛物面截面反射镜组成。焦点距离和镜子的位置取决于输入光束的发散角。   规格:像散激光光束 由激光二极管发出的强像散高斯光束 忽略发射区域在x和y方向可能发生的移动   规格:柱形抛物面反射镜 有抛物面曲率的圆柱镜 应用用锥形常数.-1来实现锥形界面 曲率半径等于焦距的两倍  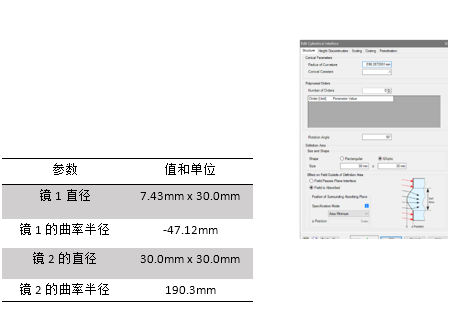 对称抛物面镜区域用于光束的准直 从VirtualLab元件目录使用离轴抛物面镜(楔型) 离轴角决定了截切区域     光束整形装置的光路图  因为离轴抛物面镜的位置是相对于它的焦点,那么到反射镜2的距离z必须是负的。 反射光束整形系统的3D视图  光学元件的定位可以通过使用3D系统视图来显示。 绿线表示生成的光轴,由VirtualLab的基础定位方法生成(仅仅设置了距离z和倾角)。 详述案例 模拟和结果 结果:3D系统光线扫描分析 首先,应用光线追迹研究光通过光学系统。 使用光线追迹系统分析仪进行分析。 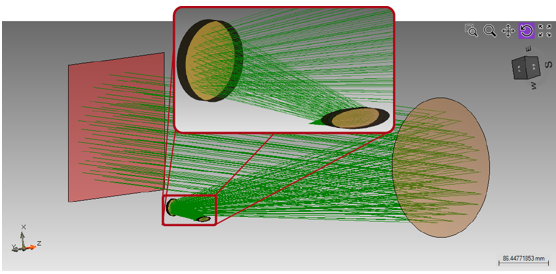 使用参数耦合来设置系统 自由参数: 反射镜1后y方向的光束半径 反射镜2后的光束半径 视场角,这决定了离轴取向(这些值保存为全局变量) 由于功能原理,所有系统参数(距离,焦距,直径)可以由光束参数分析计算。 对于此计算,应用了嵌入的参数耦合功能。   自由参数: 反射镜1后y方向的光束半径 反射镜2后的光束半径 视场角,这决定了离轴取向(这些值保存为全局变量) 基于光束发散角和直径(x和y方向)焦点,可以计算并设置反射镜的直径和距离z。 如果这个例子评估20个参数,那么返回到光路图(LPD)。 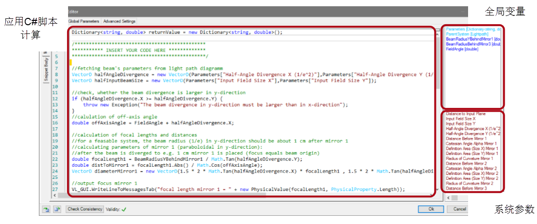 结果:使用GFT+进行光束整形  现在,利用几何场追迹+计算生成的光束剖面。 由于离轴设置,光线分布显示出轻微的不对称形状。 不过,场分布几乎是对称的(最好是使用伪色(false colors))。 产生的相位是完全平坦的,产生的波前误差:  file used: BDS.0005_Reflective_BeamShaper_01_RT.lpd 结果:评估光束参数 从生成的整形光束场分布,可以评估光束参数。 可以直接通过使用探测器界面实现。 在这个例子中,我们对光束半径,发散角和M2值感兴趣。  整形光束在x和y方向上显示了一个几乎相同的半径。 发散角大约是4urad。 M2值明显高于1。(与理想高斯光束相比,高M2值是由光束偏离引起的)  file used: BDS.0005_Reflective_BeamShaper_02_BeamShaping.lpd 光束质量优化 通常,使用合适的高斯调制光阑以用于优化M2值。 因此,我们使用测量的半径作为腰束半径(消除发散角)来生成一个高斯光束。 之后,将接收场转换成一个透射函数。 将该传输函数用作光阑(在一个透射函数元件中)。  结果:光束质量优化 由于通过高斯孔径传播,光束显示出理想高斯形状。 因此,M2值在两个方向上几乎都是1。  然而,光束半径是略有减少。(光束半径显示在最后一张幻灯片是由于其偏离了理想高斯。)  file: BDS.0005_Reflective_BeamShaper_03_BeamOptimization.lpd 反射镜方向的蒙特卡洛公差 对于公差,在随机模式下我们使用参数运行特性。 这意味着参数变化是的正态  对于这个例子,假设每个反射镜都有±0.1°的角度偏差(绝对的方向)。 由于这个偏差,整形光束的波前差明显增加。 这意味着,波前对对齐误差很敏感。  file used: BDS.0005_Reflective_BeamShaper_04_Tolerancing.run 第一个随机公差的典型强度分布:(相应的均方根波前差:1.08λ,40.4λ,140λ)  由于波前差和因此校准的偏差更大,M2值明显增加。可以使用高斯孔径来减少。 总结 实现并分析高性能离轴和无色散反射光束整形装置。 1.模拟 通过使用光线追迹来验证反射光束整形设置。 2.研究 为了计算场分布和评价光束参数,应用几何场追迹+(GFT+)引擎。 3.优化 通过使用显示出高斯整形孔径函数和经典场追迹引擎来优化M2参数。 4.分析 通过应用蒙特卡罗公差来分析取向偏差的影响。 可以使用VirtualLab Fusion非常有效地模拟和分析复杂的光束整形装置,尤其是离轴系统。为此,根据情况应用不同的模拟引擎。 参考文献 [1]M. Serkan, H. Kirkici, and H. Cetinkaya, “Off-axis mirror based optical system design for circularization, collimation, and expansion of elliptical laser beams”, Appl. Optics 46, No. 22, 5489-5499 (2007). 进一步阅读 进一步阅读 获得入门视频 - 介绍光路图 - 介绍参数运行 关于案例的文档 - BDS.0001: Collimation of Diode Laser Beam by Objective Lens - BDS.0002: Focus Investigation behind Aspherical Lens - BDS.0003: Optimization of a Lens Doublet for Laser Beam Focusing - BDS.0004: Focal Beam Size Reduction by Generating a Bessel Beam using Axicon Pair |
|