| infotek | 2026-04-15 08:00 |
OCAD应用:五组元连续变焦系统 图1.变焦系统高斯计算窗体 ① 外形尺寸自动计算 在选择“设计”菜单中的“变焦系统高斯计算”后,会出现一个如图1的小窗体。窗体中央显示了五组元连续变焦系统的结构示意图,下面表格给出系统的特征数据列表,左上方有下拉式文本框选择设计计算以前固定组还是以后固定组为基础。根据前固定组求解是已知前固定组焦距值出发计算系统外形尺寸数据,反之是从后固定组焦距值出发计算系统外形尺寸数据。按表中内容填写完毕,五组元连续变焦系统的外形尺寸计算工作立即自动完成。此时如果 选择工具条上“图文”按钮就会显示系统外形尺寸计算结构数据,如图2。  图2.外形尺寸计算数据 如果选择工具条上“动画”按钮还可以显示系统变焦运动的动画效果。如图3。 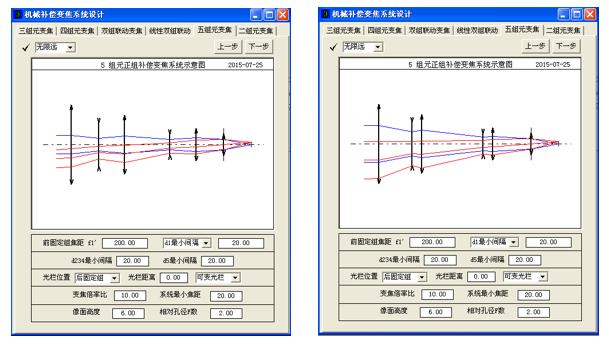 图3.变焦系统变焦运动动画  图4.填写初级像差系数 ② 初级像差系数自动平衡 完成外形尺寸计算后就可以接着进行系统初级像差的平衡优化设计。此时按“下一步”命令钮,窗体立即出现下一个画面如图5。其中列出两个表格,一个是要求输入各初级像差系数的目标值,另一个要求输入系统各组元的PW参数的初始参考值及其权系数。 参加优化设计的初级像差项目可选,选择时使用工具条上插入和删除按钮进行操作。以上数据输入完毕,按动工具条上确定按钮,计算立即完成,并显示在下面文本框内,如图5。利用工具条上“图文”菜单随时可以单独显示PW自动优化结果,得出系统实际像差平衡数据,最终完成五组元连续变焦系统的高斯光学设计。 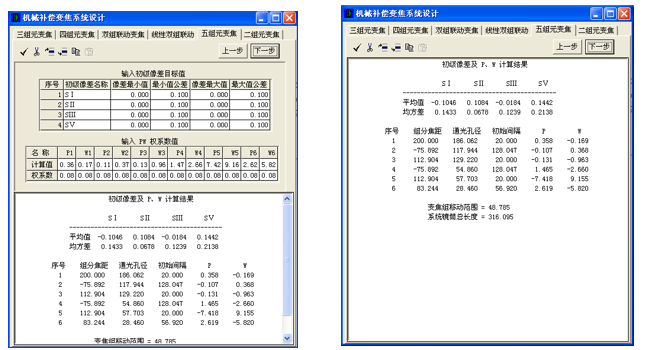 图5.PW自动优化结果 ③ 机械补偿式连续变焦光学系统的凸轮曲线 所谓机械补偿式连续变焦光学系统就是利用两个活动组分(俗称变焦组和补偿组)各自以不同函数的运动规律沿轴向移动改变光学系统各组分间表面间隔距离在改变系统焦距的同时保持像面位置稳定不变。在镜头机械结构时往往采用凸轮结构形式完成活动组分按要求运动。在设计凸轮机构时必须由光学设计给出凸轮运动曲线。凸轮曲线是在设计机械补偿式连续变焦光学系统时,为保证系统像面位置稳定,用高斯光学理论计算变焦组和补偿组的运动曲线。为此,在本设计时就自动计算出了系统凸轮曲线坐标值并绘出凸轮曲线如图6,通过工具条上“图文”菜单随时可以显示凸轮曲线的参数坐标值如图7所示。  图6.变焦光学系统凸轮曲线图  图7.变焦光学系统凸轮曲线参数表 ④ 五组元连续变焦系统各组分对像面偏移及补偿的关系 五组元连续变焦系统各组分对像面偏移及补偿的关系如图8所示。  图8.各组分对象面偏移的贡献示意图
|
|