| infotek | 2026-04-01 07:58 |
VirtualLab Fusion参数扫描动画教程—以轴锥镜-透镜生成3D瓶束为案例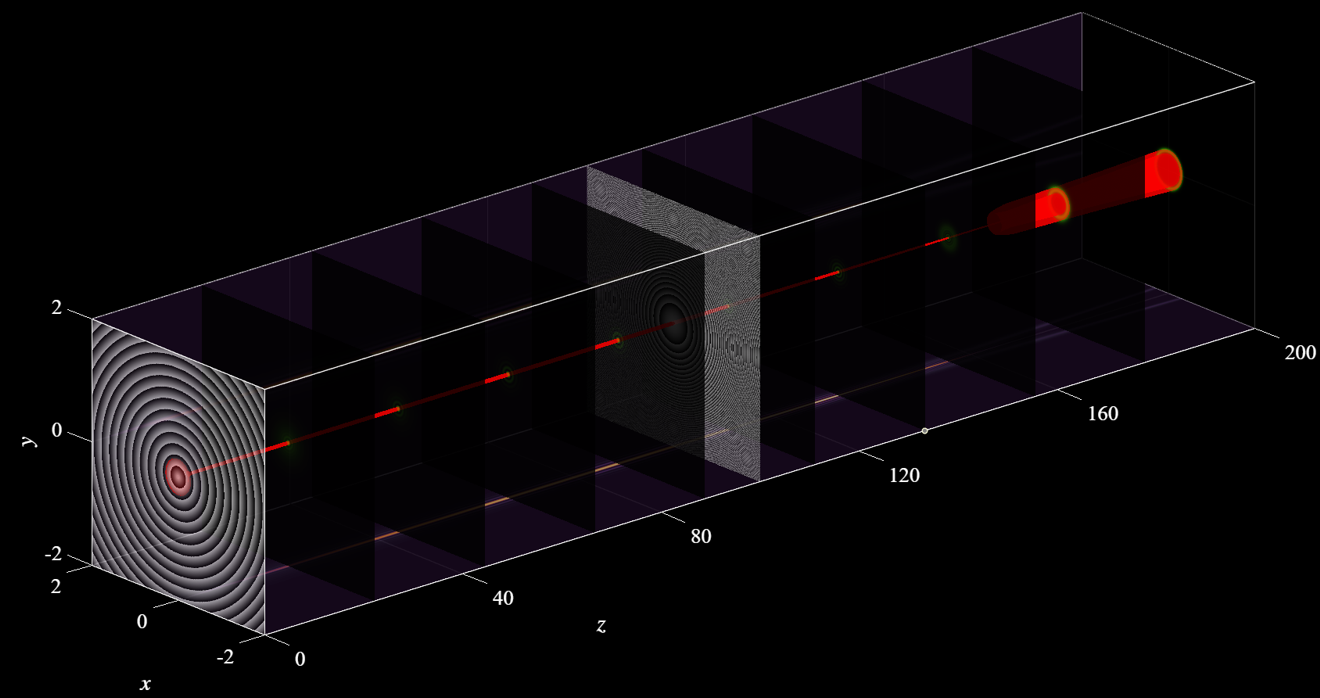 图1. 轴锥镜和透镜将光束转化为中空的瓶束 轴锥镜和透镜构成的系统可以将高斯光束整形为环形光束,并且可以生成三维的瓶底光束。这一期将通过对这个系统的建模带领大家了解VirtualLab Fusion的参数扫描功能和动图的生成过程。 轴锥镜的传输函数为exp(-i2π/λrα),其中λ为波长,α是径向调控因子。透镜的传输函数则是exp(-i2π/λr^2/f/2),f为焦距。如图2所示,二者均可以通过可编程函数进行建模。 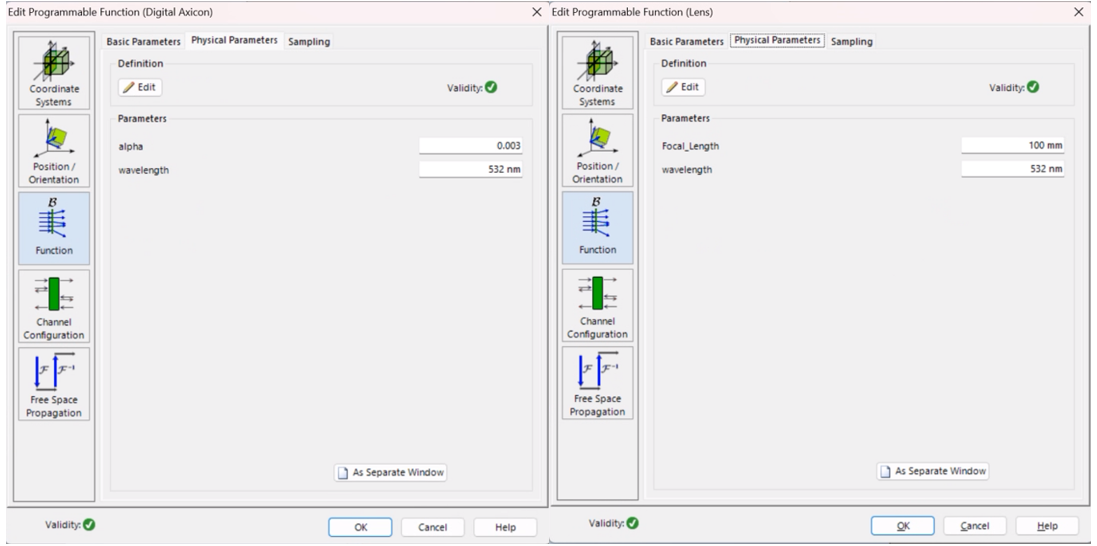 图2. 通过Programmable Function定义轴锥镜参数和透镜参数 搭建好的光路图如图3所示,光源为0.5mm,532nm高斯光束,经过整形系统后形成中空瓶束,放置在特定位置的探测器可以获得此处的横向光场分布  图3. 光路图 图4展示了分别位于30mm和100mm处的光斑。可以看到在30mm处为贝塞尔光束,而在100mm处为环形光束,整体构成了3D的中空瓶束。 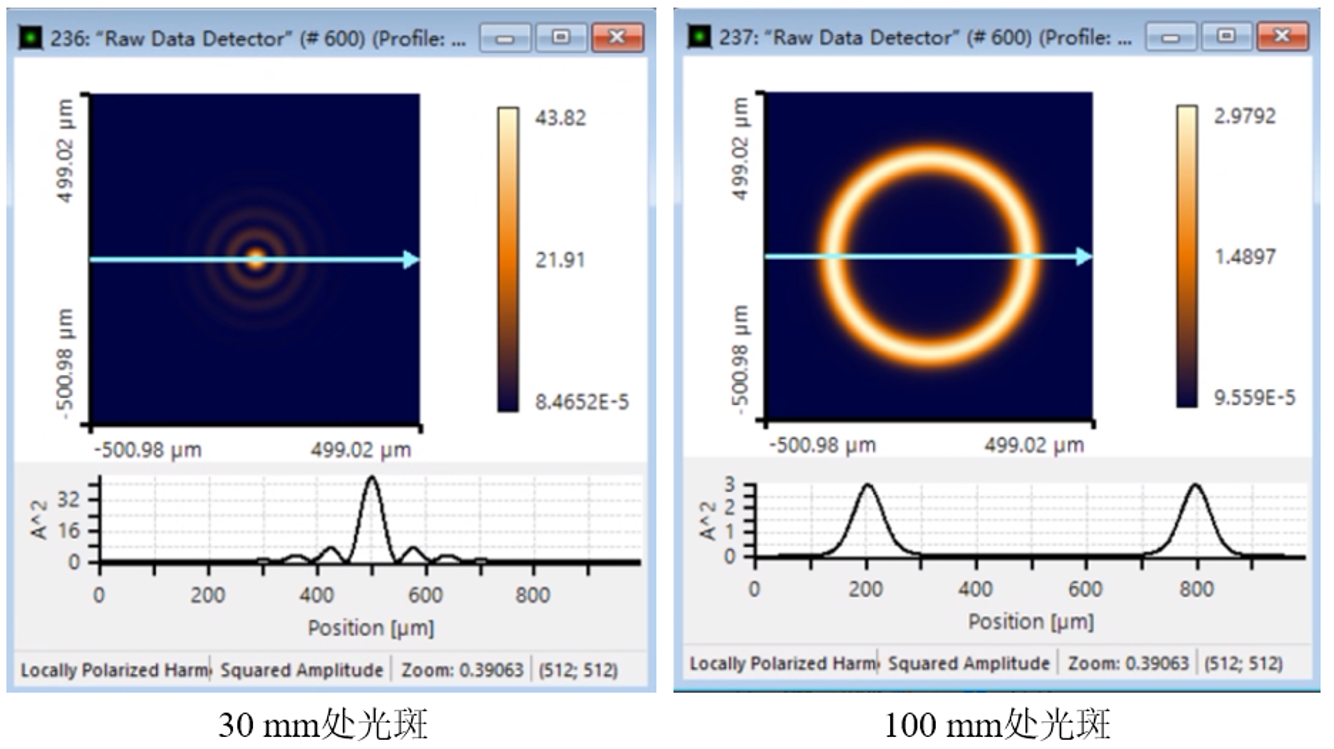 图4. 不同位置的光斑分布 打开New Parameter Run,点击下一步。 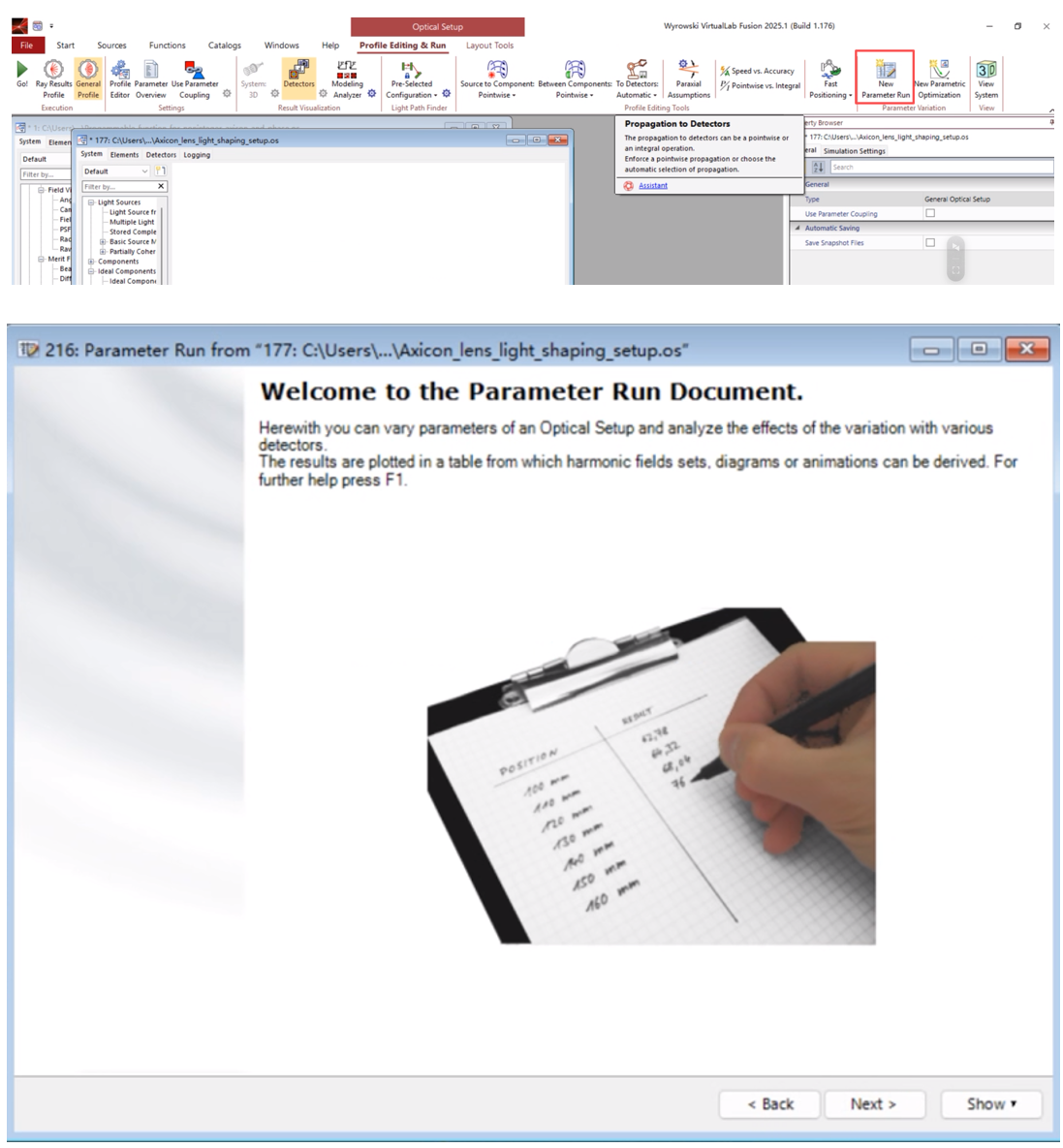 图5. New Parameter Run对话框 在这一步,可以选择希望扫描的参数,比如这里让探测器从0到100mm,步长为10,即它会记录10个位置的强度分布。 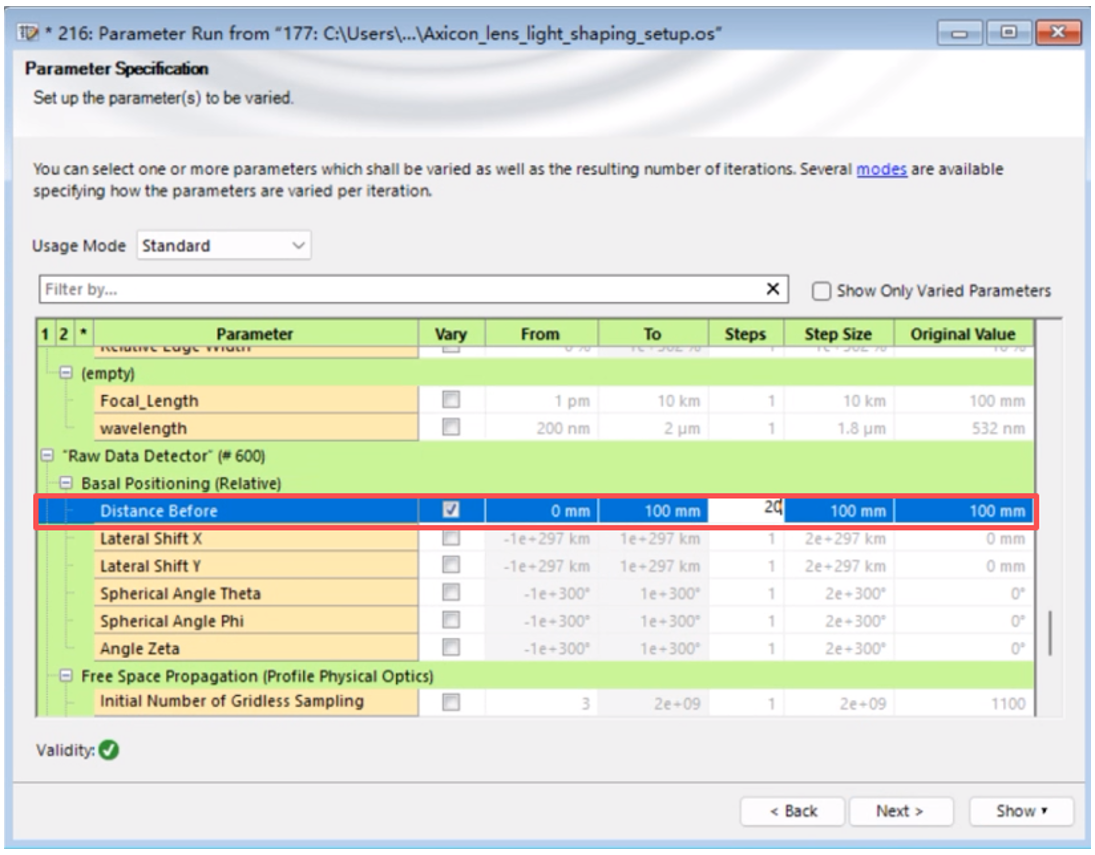 图6. 选择对应的参数,设置初始值和终值,设置步长接着点击下一步。 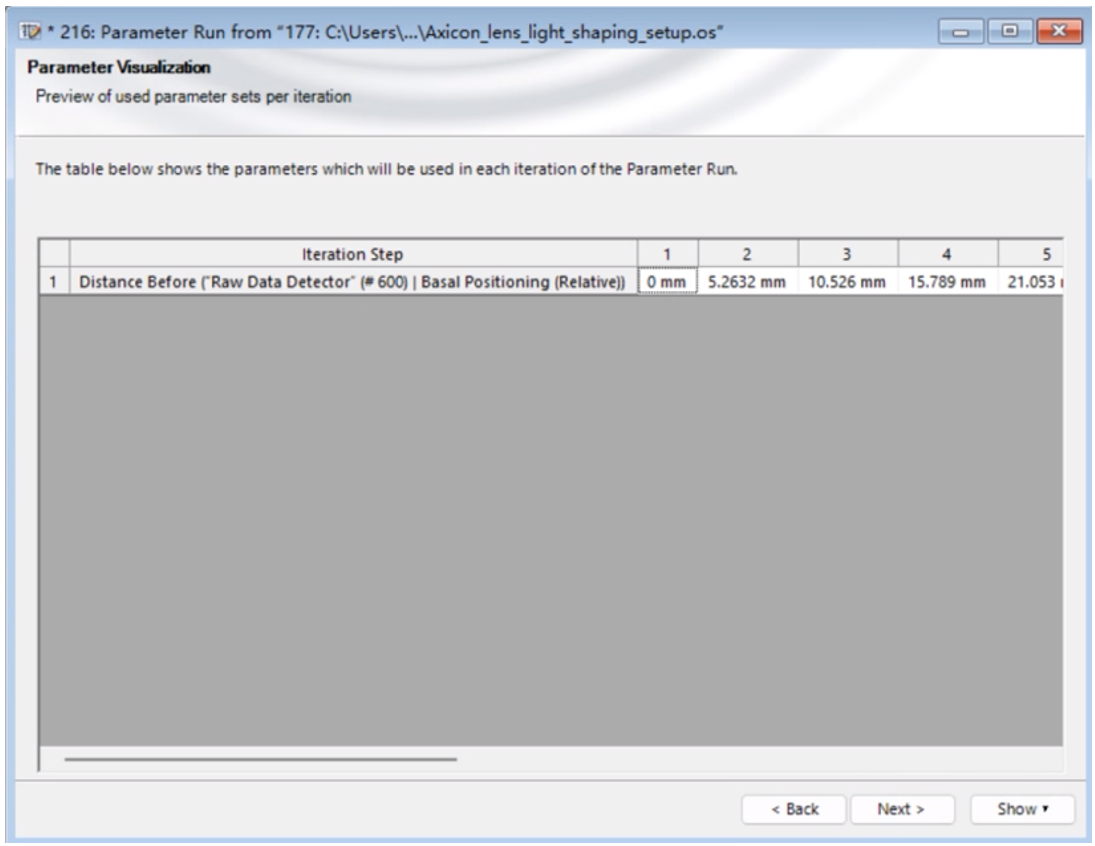 图7. 迭代参数预览 设置为场追迹引擎,显示探测器结果。点击下一步。 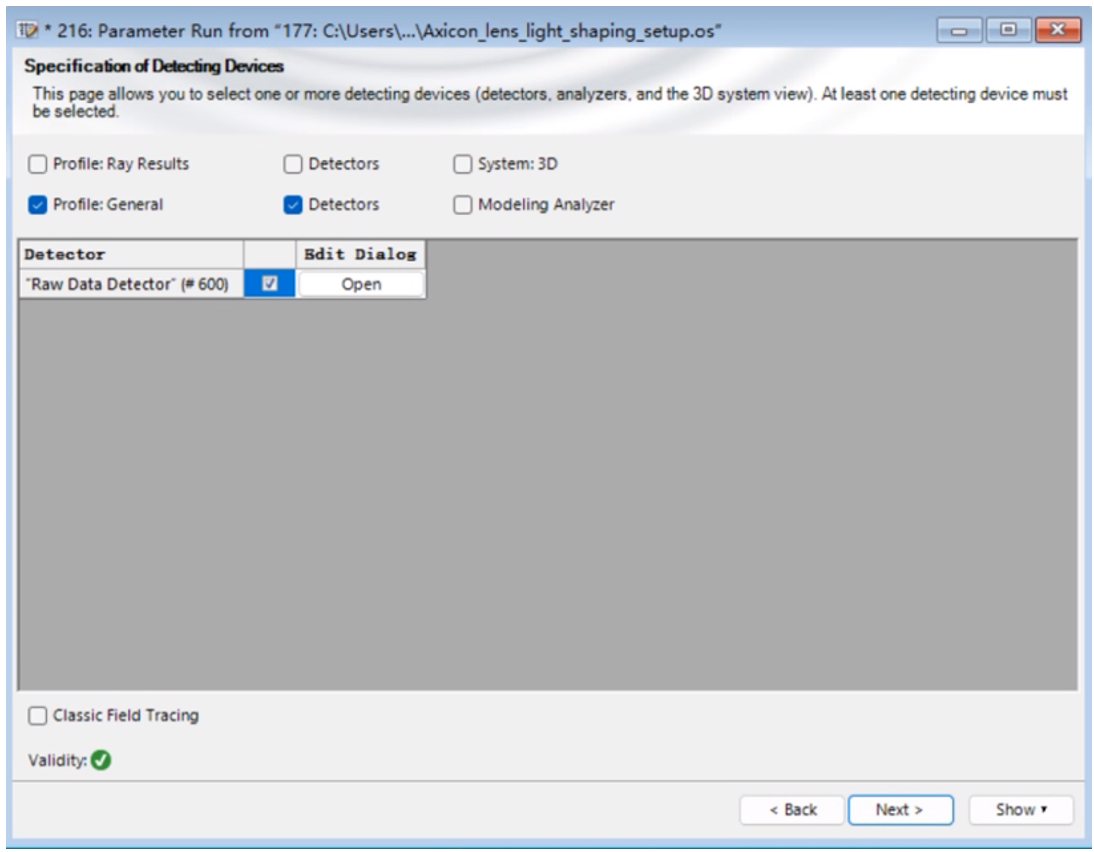 图8. 选择场追迹引擎 点击Go。 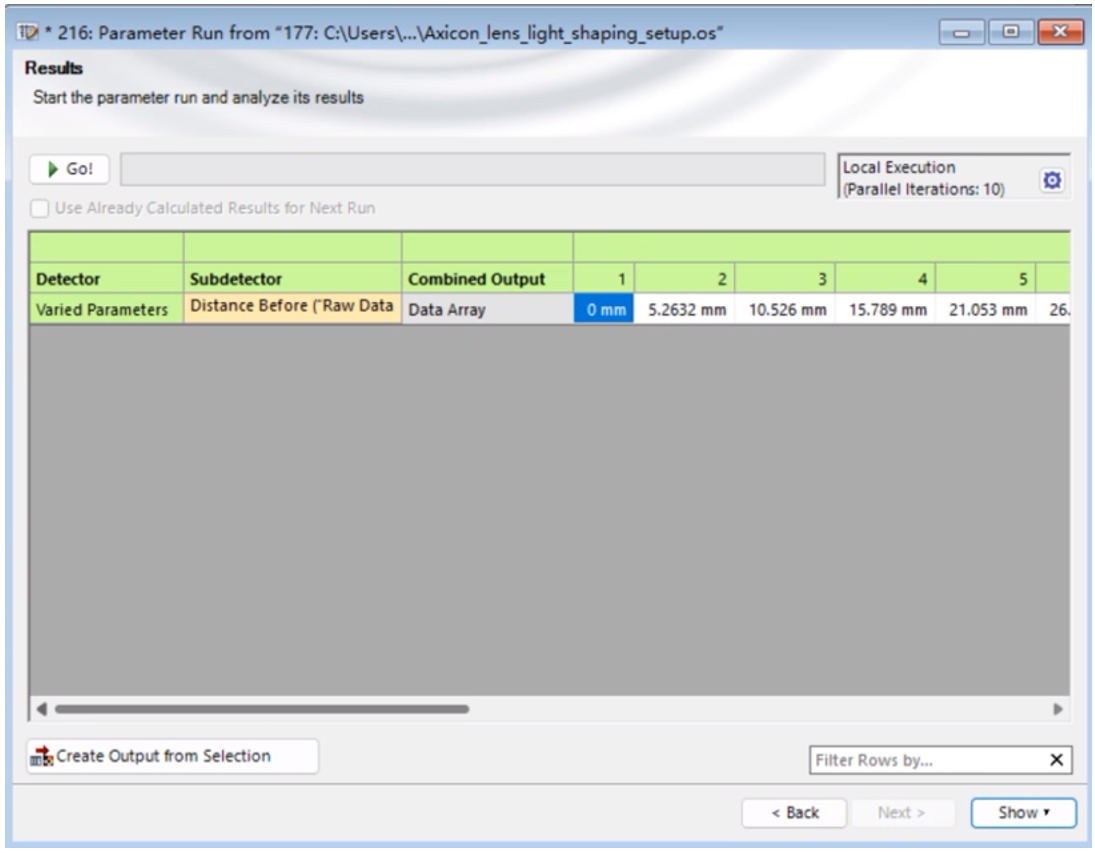 图9. 启动界面 运行完成后先选择对应的行,确保Combined Output这一项为Animation,点击Create Output from Selection可以生成对应的动画。 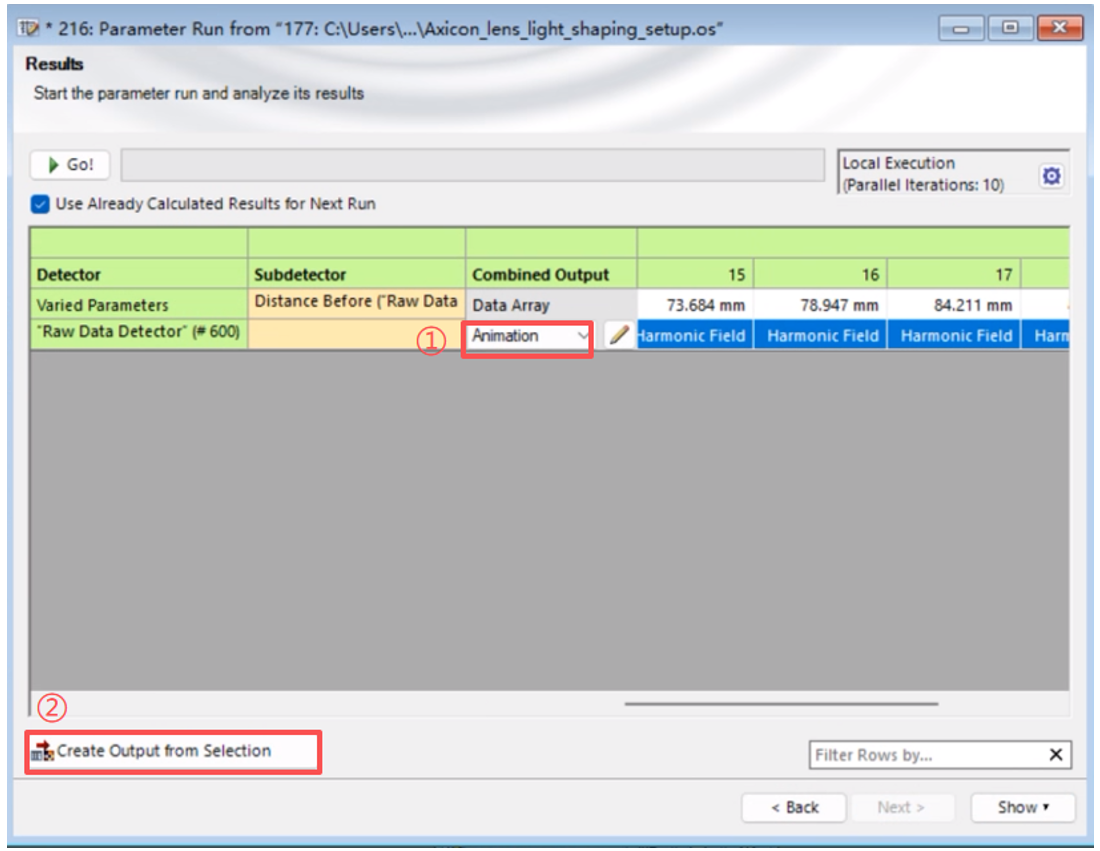 图10. 选择对应的参数集,创建动画文件 在File->Export可以选择导出为GIF或者视频格式。 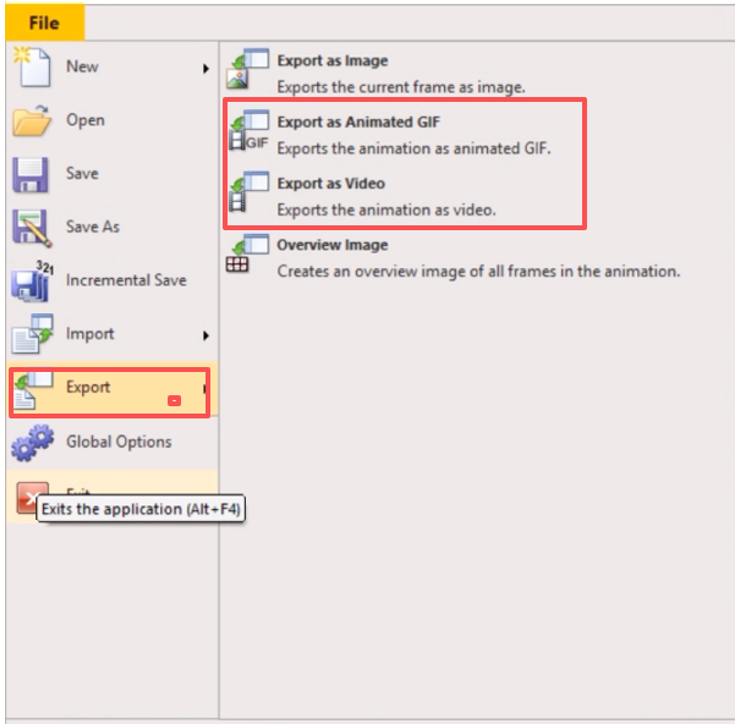 图11. 导出动画为GIF格式或视频格式 当轴锥镜和透镜的距离小于等于焦距,会出现一端闭合另一端开口的瓶束,如图12所示: 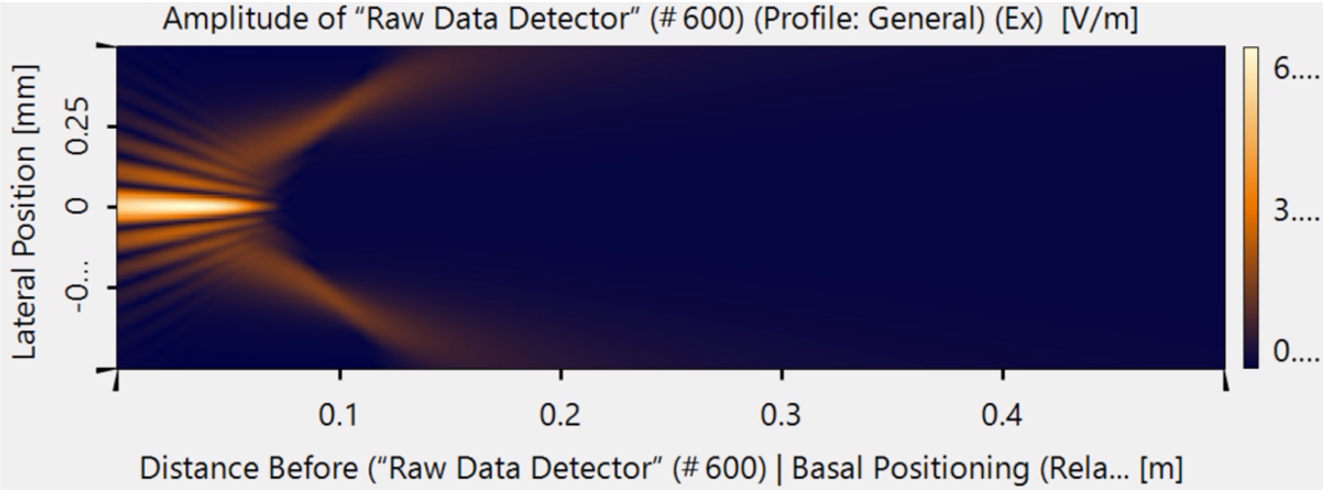 图12. 轴锥镜和透镜距离为100mm时的结果 当轴锥镜和透镜的距离大于焦距,比如焦距为100mm,距离为160mm时会出现两端均闭合的3D瓶束,如图13所示: 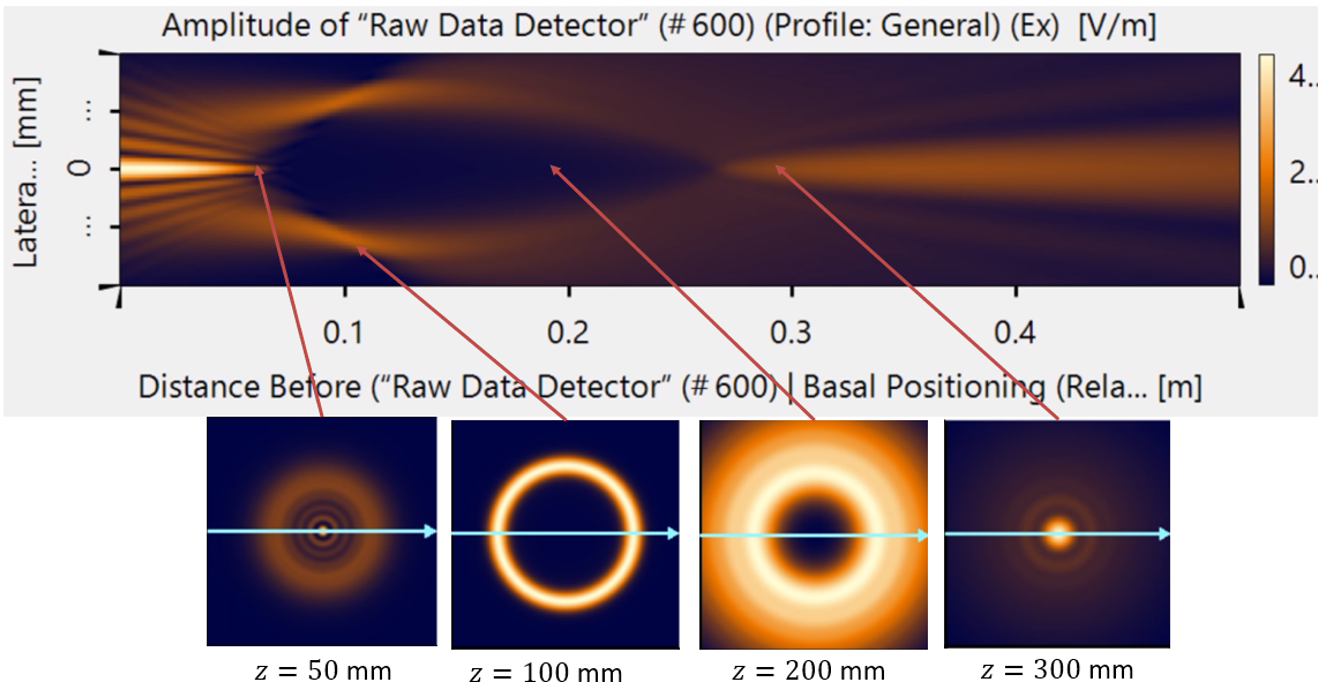 图13. 轴锥镜和透镜距离为160mm时的结果  图14. 导出的GIF动画 总结 这一期首先用可编程函数对轴锥镜-透镜瓶束生成系统进行了建模,并使用参数扫描功能改变探测器的位置探测不同位置的光场分布,使用Animation创建动画。VirtualLab Fusion支持多元化仿真,参数扫描功能可以助力系统优化。 |
|