| infotek |
2024-11-11 07:54 |
基于SLM光束整形系统中光学系统像差的研究
空间光调制器(SLM.0003 v1.0) 2I{kLN1TY�
应用示例简述 Ly]�J-B�Te
1. 系统细节 N]&:��xd5�
光源 =$#=w?�~�%
— 高斯激光束 H�4uHC�kj�
组件 jAf��qC@e
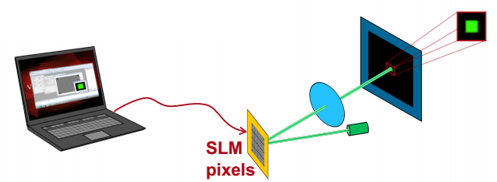
— 反射型空间光调制器组件及后续的2f系统 �B:(a?X-7
— 不同的傅里叶透镜设计(球面,非球面) 具有不同的性能和像差 B[fb��P�rM
探测器 =a(]@�8$!1
— 视觉感知的仿真 C'a�#.L�M
— 高帽,转换效率,信噪比 nTr{��D&JS
建模/设计 �z|O3p�Qn~
— 场追迹: K$5mDSc�oJ
基于不同性能傅里叶透镜的SLM光束整形系统的性能评估。 ��"6�>+�IF
�:Q"p!,X=-
2. 系统说明 0�D&�-BAzi
N 'YzCq;M�
 �?4#wVzuzA �?4#wVzuzA
�!H~PF*,hY
3. 建模&设计结果 .Xk#Cw�m�'
&p5^Cj�y L
不同真实傅里叶透镜的结果: �)j�m��!^m
5QZ}KNJ|t~
 �'L��C0hoV �'L��C0hoV
n,`j~.l-=>
4. 总结
#M|q}j�A|
基于采用傅里叶光学的SLM光束整形系统的性能研究。 bki�MF$K,K
�%Q zk aXJ
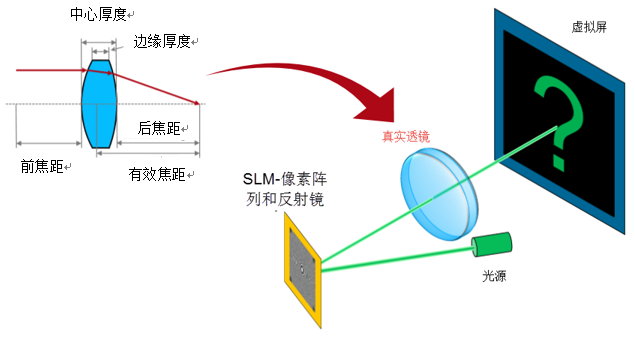
理想光学系统采用2f系统代替具有透镜像差的真实透镜。 �G|���q�sJ
分析由不同球面和非球面的性对高帽光束质量的影响。 -A�wk����P
�,y�g�DN�F
光束整形应用需要高性能和低像差的光学系统,如非球面系统。 [I78<�IJc�
.-GC,��&RO
应用示例详细内容 L�@�`:mK+;
)3)x�/WM��
系统参数 �6�yd?x�eD
1�S�d<cOEd
1. 该应用实例的内容 �;Hn>�Ew�
+.McC$!�s
.@�@&q4=�&
n�a�_�Wp^;
fwv�.�^k�x
2. 仿真任务 x]vyt}oCmk
� yHn8t]{
在之前的案例中,采用了理想的傅里叶光学系统(2f系统)。在接下来的工作中,使用真实的透镜进行替换,该透镜存在多种光学像差。 ��s,-}}6WO
-�=)+)9~G
3. 参数:准直输入光源 �V�lS`m,:{
(Ji=fh�+��
 &���90�pKs &���90�pKs
���N'YQ�6U
4. 参数:SLM透射函数 ]~4*ak=)5\
G�k!CU"`sP
 VN]j*$5 � VN]j*$5 �
5. 由理想系统到实际系统 ~z7�F�z"o<
eO�J_L]y�-
fK��+�[r1^
用真实的傅里叶透镜代替理想2f系统。 ]�P)2Q�!X
因此会产生像差,像差由所用系统的性能决定。 }ni@�]k#q<
对于真实透镜系统的描述,需要必要的耦合参数。 CIAKX�YM�
实际系统可这样选择:有效焦距有2f系统相近。 L[MAc](me-
表格中的参数与之前采用的2f系统理想指标一致。 Wt!8�.d}�=
 :a�_�M���T :a�_�M���T
UD_8#DO{m1
 U�,T�h-�oU U�,T�h-�oU
~{q;�
�-�&
应用示例详细内容 Og?P5&C"9D
8r�48+_y3u
仿真&结果 #�#'ue�kSJ
Z._%T$8aJv
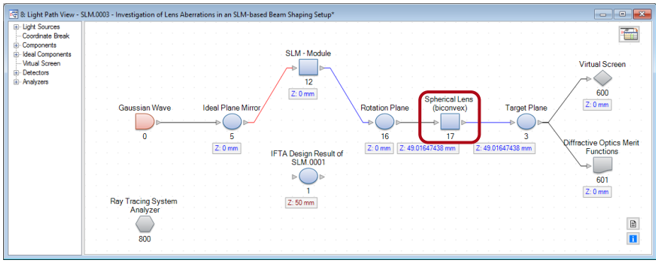
1. VirtualLab中SLM的仿真 )zu m.6p�T
51`*VR]`K�
由于可以嵌入组件,VirtualLab可以轻松的实现反射系统(如反射镜,真实透镜等)。 �X�F?"G<2
以一个真实的系统(双凸球面透镜)作为傅里叶透镜。 GSV�LZF'+�
为优化计算加入一个旋转平面 -�P28pVX`�
���#|F5Kh"
@Op7�OFY%
T*](oA@��
2. 参数:双凸球面透镜 �vxXrVPU3�
�ogG:Ai)90
*y��N#q�>1
首先,使用一个具有相同曲率半径的双凸球面透镜。 lSBu,UQP��
由于对称形状,前后焦距一致。 t��W%!|T5/
参数是对应波长532nm。 {���r:5��\
透镜材料N-BK7。 o^+g2;�Ro�
有效焦距可通过VirtualLab中的透镜计算器进行计算。 +4V�"&S|�&
o�Fp4*��<\
 q=��;U(,Y� q=��;U(,Y�
o=
�&/��;X
 '�v%v*Ujf[ '�v%v*Ujf[
AP0��z~��e
3. 结果:双凸球面透镜 ��^��-%��O
ij02J`w:Ra
!~te&ccPE�
生成的礼帽光束是一个干涉图案的叠加,干涉图案的出现时由于像差造成的。 sNsWz.DLT#
较低的转换效率(56.8%)和信噪比。 @�%�I-15Jz
一个对称双凸系统不能提供合适的传输性能。 �<+�AvbqDe
�I04c7cDp
 6<{Sb�E|G{ 6<{Sb�E|G{
Z!�I�#�Z2X
 DVw� 04ay% DVw� 04ay%
4. 参数:优化球面透镜 y�X�C�J?��
2(2�5IYMS8
R'h�.��lX�
然后,使用一个优化后的球面透镜。 &@z
M<A���
通过优化曲率半径获得最小波像差。 ShJBOaE; -
优化获得不同曲率半径,因此是一个非对称系统形状。 .�r \g���]
透镜材料同样为N-BK7。 1.�z]/cx<y
�>44,Dp�]�
$TF�Wum9wO
关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003 �y�
��hNy�
}��/aqh�;W
 ?J���28@rM ?J���28@rM
>?r�8D48`�
5. 结果:优化的球面透镜 ��T4��9^��
y#-~L-J�_R
���lnt�}�l
由于球面像差,再次生成一个干涉图样。 �$z�J��!L�
转换效率(68.6%)和信噪比一般。 ;oVF�c�ZSA
一个优化的球面系统同样不能提供合适的传输性能。 /`�b`ai8`8
 $m�ut v=IO $m�ut v=IO
 \�Z$MH`_nu \�Z$MH`_nu
ej�lau#8"
6. 参数:非球面透镜 M+Eg�{^ q`
�q�8�2y�h&
�'%Ka�Ai�$
第三,从Asphericon中选择一个非球面透镜(类型:A25-50LPX)整合到SLM系统。 �{hBn�Ej^@
非球面透镜材料同样为N-BK7。 pRFlmg@/�}
该透镜从VirtualLab的透镜库中导入。 *&$�2us0%%
Jjn�Wv7W3$
关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003 Q�I6=�[��
[}Y_�O*C !
DcmR�vi)&6
 p�U[5�f5_� p�U[5�f5_�
���`W'S'?$
7. 结果:非球面透镜 _TjRv��ILC
k�1��Sr7|�
�@��_Es|(4
生成期望的高帽光束形状。 �:d��jbZ><
不仅如此,转换效率(90.8%)和信噪比都非常好。 i} ?\K>BWq
非球面透镜以几乎零像差将SLM函数转换成高帽光束。 �1���|oE3
(�\CH;c�-@
 PQ(/1v ��� PQ(/1v ���
 �-5�<G^AS� �-5�<G^AS�
i#(+�Kxr]>
8. 总结 �~�A,(D�-�
基于采用傅里叶光学的SLM光束整形系统的性能研究。 �:\"g}A�X
mjJ/rx{kbw
理想光学系统采用2f系统代替具有透镜像差的真实透镜。 M`Q�K{�$1p
分析由不同球面和非球面的性对高帽光束质量的影响。 /��R[P��sB
QUz_�2rN�^
光束整形应用需要高性能和低像差的光学系统,如非球面系统。 =7Sw2��9u<
ew*�;mQd�
扩展阅读 ��KBwY ��_
o�5<���w2(
扩展阅读 NU.Y���L1�
开始视频 z�d?uMq�;w
- 光路图介绍 AJ)�N?s�-=
该应用示例相关文件: |#x]/AXa0/
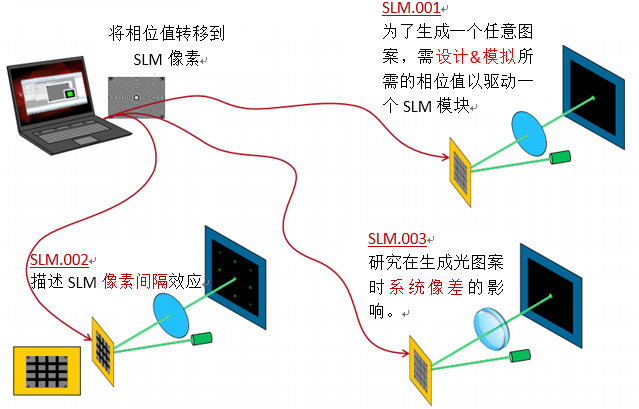
- SLM.0001:用于生成高帽光束的SLM位相调制器设计 hp�z�DQ6-Y
- SLM.0002:空间光调制器位像素处光衍射的仿真 �Jw�cC9�
O
|
|