Q��I�FgQ0{
关键词:光线追迹,镜头,优化,曲率半径,设计 A�bW���6x�
p!AAF��mc�
1.描述 FW�� D�Npr
{R{=+2K!|k
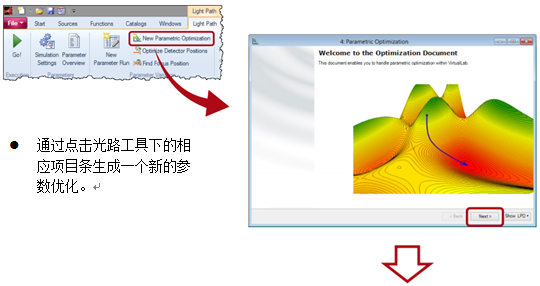
▷ 在该示例中,我们介绍了如何利用VirtualLab软件中的光线追迹引进行参数优化。 a(ZcmY�zXU
▷ 在此示例中,对一个球面透镜进行优化,使其在透镜后指定的距离上生成聚焦光斑。 ��j3ls3H&
▷ 球面镜的光学界面的曲率半径被设计为自由变量。 �+:/%3}�`�
�b"
[|:F>P
2.系统光路图及系统配置 SUK?z!f�<i
�pEz_q�y[#
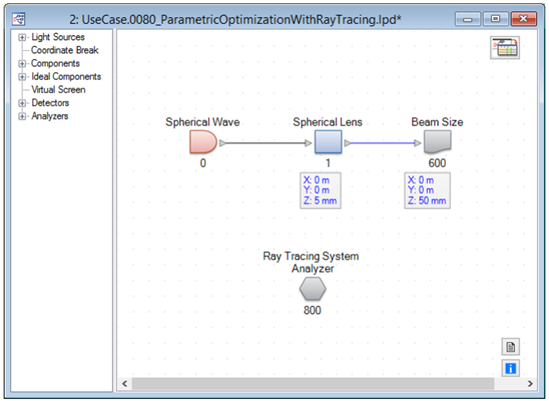
文件名:UseCase.0080_ParametricOptimizationWithRayTracing.lpd �:\_� 5oVb
9%ob�q�/Lb
▷ 该光学系统由球面波照射一个球面透镜组成。 \o�3gKoL�%
▷ 通过设计,使透镜的焦点位于透镜后50mm的位置。 +&H4m=D-#a
▷ 在目标平面处,利用光束尺寸探测器计算光斑的大小。 j�<e2d�7oN
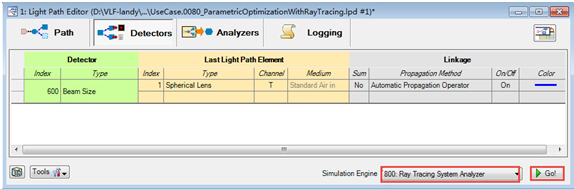
▷ 光束尺寸探测器提供了几个选项,包括利用光线追迹引擎评估光斑的大小。 V>3X\�)q�u
▷ 用户可以选择测量方法(RMS或峰值)进行计算,也可以附加参数。光束尺寸探测器参数窗口 t sRdvFFq�
�
�C9)@jK%
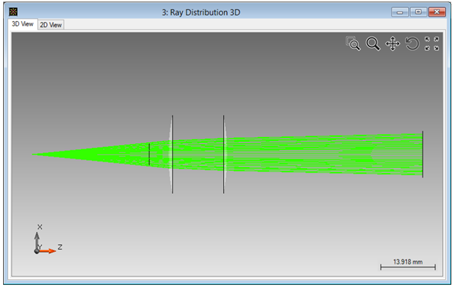
3.初始系统的光线追迹结果(3D) G�=bCN��n<
选择光线追迹系统分析器,点击Go! 初始系统光线追迹结果 �m��.0�*NW
�3=V��&�K-
4.参数优化的生成 ql~�J8G�9
;q>a�h!"�k
>=w)x,0y�X
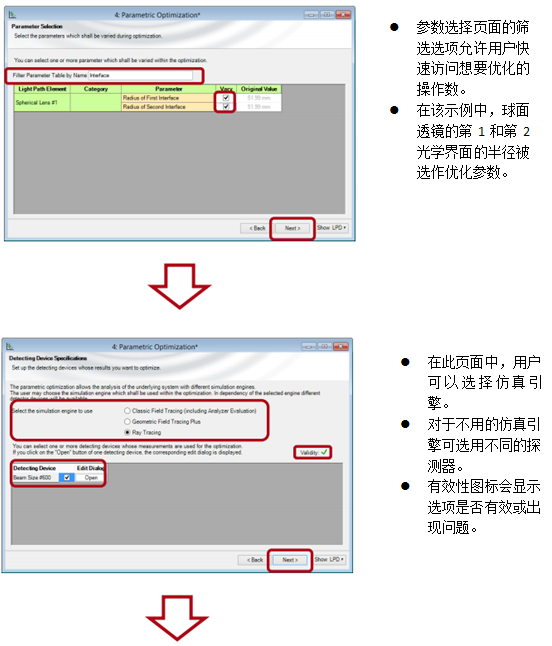
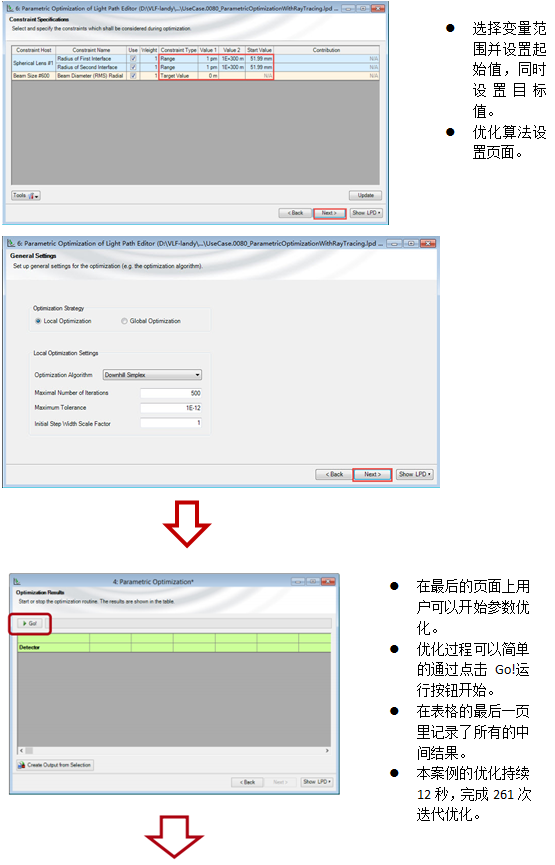
5.设置参数优化 ��i��,�VMd
 .�x�&�%HA� .�x�&�%HA�
K)iF>y|{*q
&B�Sn�?�
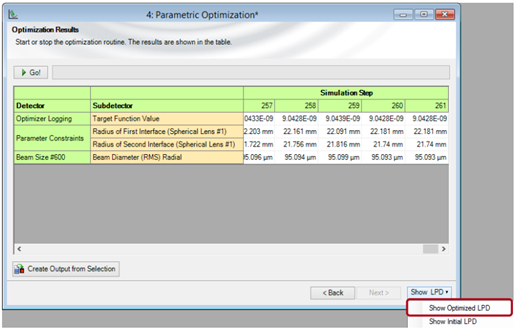
6.参数优化结果 h�Xya*#n#
,<X9�Y�2B
�1k^oS$�UT
优化结果页面,选择“显示优化后的光路图”(”Show Optimized LPD”)可以获得优化后的光路图 bvOq�5Q6��
0<��*��<$U
7.优化后系统的透镜参数 :Ll�b< MY2
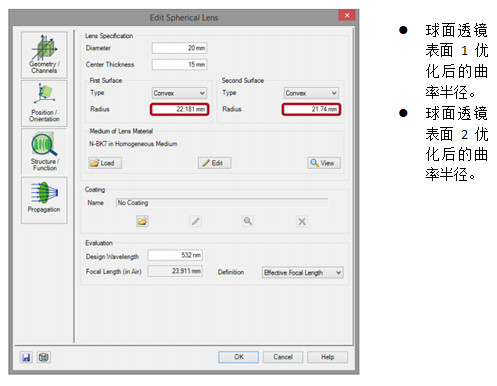 cm�+P]8o%{ cm�+P]8o%{
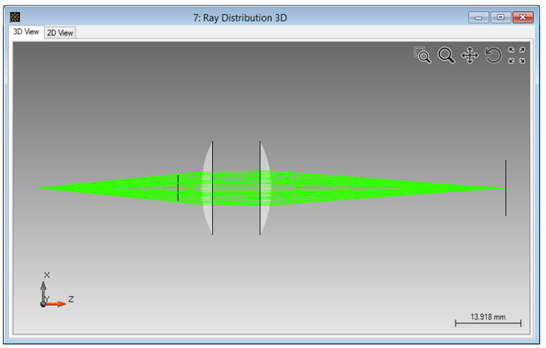
8.优化后系统的光线追迹结果(3D) K:WDl;8�(d
通过使用光线追迹系统器(Ray Tracing System Analyzer)获得光线追迹三维结果 sa8Vvz�vo.
pTuS*��MYz
9.总结 �q1ma%�eiN
#lO Mm���9
▷ VirtualLab Fusion可以用来完成光学系统的光线追迹仿真。 iN.�n8MN=I
▷ VirtualLab提供了三维光线追迹和二维光线追迹(点列图生成及自定义评价函数)。
{�K�!)�Ss
▷ 在VirtualLab的参数优化过程中所有的引擎模块都可用。 b�~cZ�S�[S
▷ 通过一个参数的优化可以利用光线追迹完成对光学系统的优化。 43� :X,\~)
▷ 可以使用不同的优化算法。 |