| infotek | 2023-05-11 08:26 |
平凸透镜球差分析常见的初级像差:五种单色像差和两种色差。 五种单色像差分别为:球差,慧差,像散,场曲和畸变 两种色差:球色差和倍率色差 下面我们来详细分析球差产生的原因: 球差概念 什么是球差?其实球差也叫球面像差,是指轴上物点发出的光束通过球面透镜时,透镜不同孔径区域的光束最后汇聚在光轴的不同位置,在像面上形成圆形弥散斑,这就是球差。 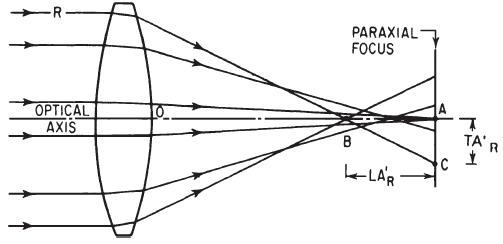 在FRED中如何表示呢? FRED中球差的表述 打开FRED软件,设计一个新的平凸透镜R1=0,R2=-25.4 ;厚度5.08 ;半孔径12.7材料为标准玻璃。 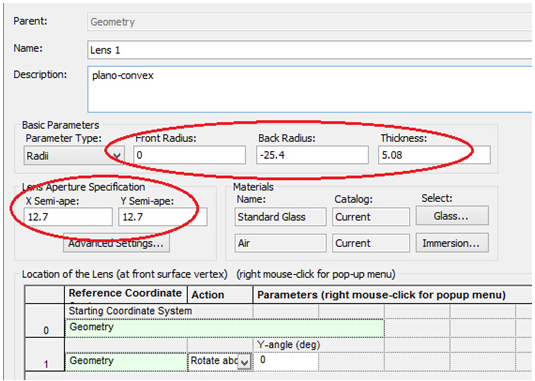  光源选择为垂直方向的线光源 X方向的光线数1; Y方向的光线数51; 孔径:11.7mm*11.7mm Z轴负方向:5mm 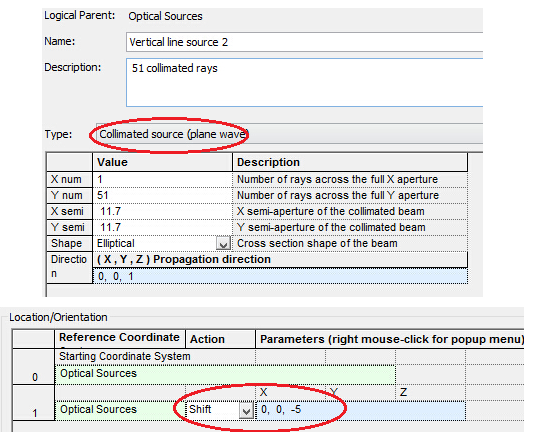 寻找最佳焦点: 最佳几何焦点的概念在FRED是RMS最小值的位置,而近轴像平面的位置RMS并不是最小值,对于近轴的位置我们可以使用减小光源的半孔径的大小,可选取半孔径1mm*1mm。 1、 追迹光线 2、 点击analyses/ Best geometric focus 3、 生成报告 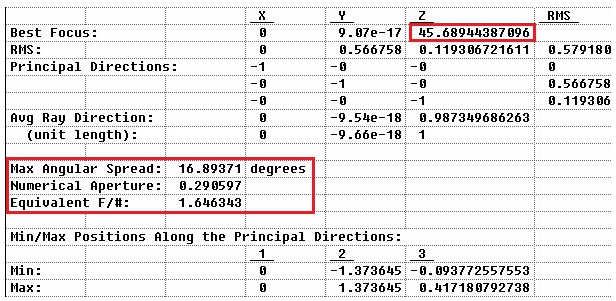 在Z方向最佳几何焦点位置为45.689443, 建立探测平面及分析面 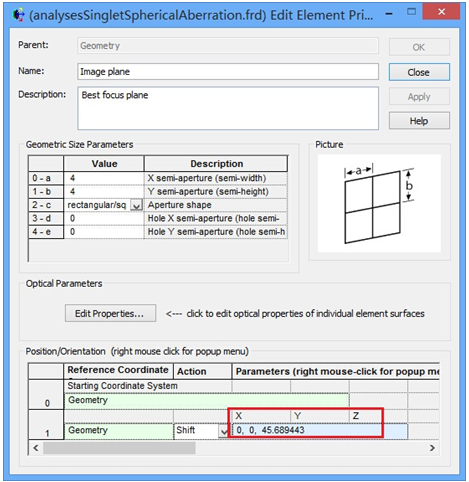 注意此时的沿着Z方向的平移值即为最佳几何焦点位置值。 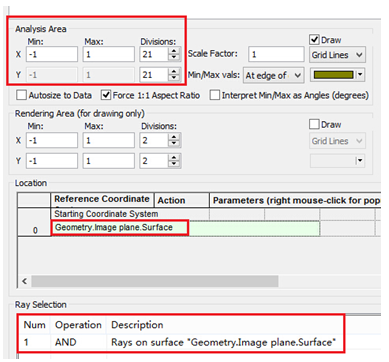 光线追迹(1*51,子午光线) 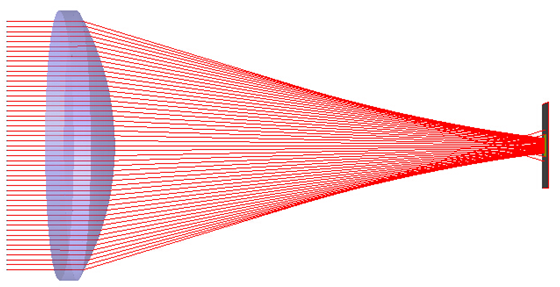 点列图:(光线设置为51*51) 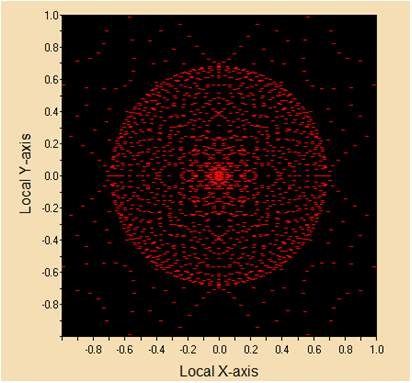 打开输出窗口,我们可以看到其RMS和几何尺寸大小, 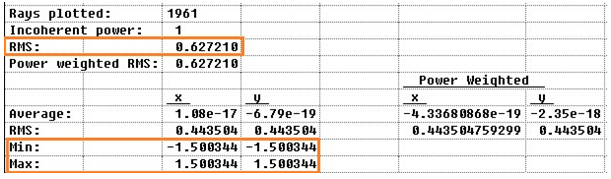 如果系统中只存在球差,那么我们可以估算其球差大小为其最大点列图最大尺寸,为1.500344mm。 但在实际的应用中,我们只需要计算其赛德尔系数SPHA。 如何查看三阶像差赛德尔系数大小: 我们这里利用近轴分析工具“paraxial analysis”,可以计算系统的一阶和三阶系数。 1. 首先我们自定义光线路径Ray trace/user –defined ray paths, 光线按照序列追迹走向分别经过面1-面2-像平面 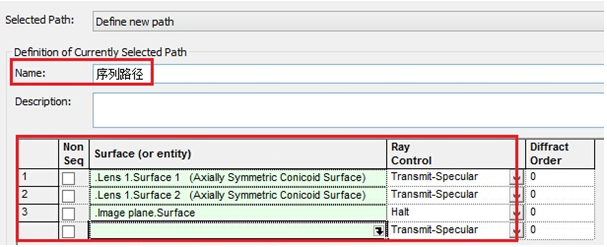 首先必须要给路径命名,其次是注意元件序列追迹的顺序以及光线通过每一面的光线属性控制,此例子中我们是允许光线在透镜面透过,因此我们选择镜像透射,并在像平面处停止。 2. 创建完成后,我们点击Analyses/ paraxial analysis 注意创建之前我们需要修改表面0的半孔径值:0.0001改为无限远的物点  点击Third Order, 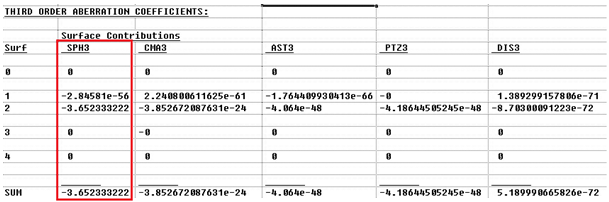 第一列即为三阶球差贡献量。 总结: 到此球差分析就结束了,FRED提供的分析工具最多可分析到三阶像差,对于高阶球差的分析则需要自定义脚本,毕竟FRED不是专门透镜设计软件,它可以导入zemax等光学软件设计好的结构。 |
|
